Sistema de transmisión flexible de agua para robots.
La invención se refiere a un nuevo sistema para la alimentación de la boquilla de corte,
prevista en los robots de los especialmente diseñados para el corte de materiales por chorro de agua a presión, que sustituye los sistemas de transmisión de agua a base de serpentines metálicos por medios flexibles, ya que los mismos o bien se agrietan, o bien se rompen, ya que de ser diseñados más flexibles no tendrían la resistencia adecuada a las solicitaciones generadas por llamados grados de libertad del robot, y la presión del líquido que circulan por su interior.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330815.
Solicitante: INGENIERIA DE APLICACIONES, S.A..
Nacionalidad solicitante: España.
Inventor/es: SERIOLA RODAS,MIQUEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B05B13/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B05 PULVERIZACION O ATOMIZACION EN GENERAL; APLICACION DE MATERIALES FLUIDOS A SUPERFICIES, EN GENERAL. › B05B APARATOS DE PULVERIZACION; APARATOS DE ATOMIZACION; TOBERAS O BOQUILLAS (mezcladores de pulverización con toberas B01F 5/20; procedimientos para aplicar líquidos u otros materiales fluidos a superficies por pulverización B05D). › B05B 13/00 Máquinas o instalaciones para aplicar líquidos u otras materias fluidas sobre la superficie de objetos o de materiales por pulverización, no cubiertas por los grupos B05B 1/00 - B05B 11/00 (procedimientos para aplicar líquidos u otras materias fluidas a las superficies en general B05D; medios para suministrar o refluir un líquido u otro material fluido con este fin, ver el apropiado de entre los grupos B05B 1/00 - B05B 12/00). › las cabezas de pulverización se desplazan en el curso de la operación.
- B25J19/00 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
Fragmento de la descripción:
"SISTEMA DE TRANSMISION FLEXIBLE DE AGUA PARA ROBOTS"
Objeto de la Invención.
Más concretamente la invención se refiere a un nuevo sistema para la alimentación de la boquilla de corte, prevista en los robots de los especialmente diseñados para el corte de materiales por chorro de agua a presión, que sustituye los sistemas de transmisión de agua a base de serpentines metálicos por medios flexibles, que unen la base del robot y pasando por los brazos del mismo, llega hasta la citada boquilla de corte.
Estado de la Técnica.
Existen en el mercado y por tanto pueden considerarse como estado de la técnica distintos tipos de robots, parte de ellos diseñados con el especifico fin de cortar materiales mediante un chorro de agua a presión, que sale de la boquilla de corte a presión elevada, del orden de 3.800 bar aproximadamente.
Para la alimentación de la boquilla de corte, dichos robots utilizan entre otros elementos, serpentines metálicos que además de resistir la presión antes indicada, absorben los giros y torsiones generadas por los movimientos de los brazos del robot, al ser flexibles y conformados en espiral.
No obstante es habitual en este sector técnico, el tener que sustituir dichos serpentines cada siete dias de trabajo, ya que los mismos o bien se agrietan, o bien se rompen, ya que de ser diseñados más flexibles no
tendrían la resistencia adecuada a las solicitaciones generadas por llamados grados de libertad del robot, y la presión del líquido que circulan por su interior.
Los citados serpentines unen el generador de 5 presión aplicable al agua, situado en la base del robot o sus inmediaciones, y rodean los distintos brazos del mismo, hasta llegar al extremo del último brazo en el que se incorpora la boquilla de corte, ocasionando en la mayoría de las veces daños en la superficie de dichos 10 brazos, que si bien no ocasionan su rotura si indican los inconvenientes de su utilización.
El extremo último de dichos serpentines va
incorporado al cabezal donde se monta la boquilla de corte propiamente dicha, la cual también gira en 15 posición de trabajo, transmitiendo este giro el del cabezal, otras tensiones y torsiones adicionales al giro de dichos serpentines, cuyas espiras también se
superponen unas a otras frecuentemente, contribuyendo al deterioro de las espirales de los serpentines.
Finalidad de la Invención.
Suprimir en los sistemas de suministro de agua a la boquilla de corte los citados serpentines, para lo cual se utilizan modelos de robots en los cuales los brazos 25 de los mismos, han sido diseñados con canales de paso de conductos por su interior, o bien el brazo adopta la
| forma de | cuerpo | simplemente | longitudinal | pero | en | sus |
| extremos | se | configuran | en | forma | de | anillos |
| perpendiculares | a dicho cuerpo | para el | paso | de | los |
conductos oportunos, agua, gas, aire, electricidad y otros, así como dicho conducto el del agua se ha diseñado en forma de tubería no rígida, con un sistema
de acompañamiento con un muelle flexible que protege el citado conducto y facilita su giro.
Adicionalmente otro de los fines de la invención, es la previsión en la punta del robot, y en su brazo extremo en el que se incorpora el cabezal de corte, de una unidad de giro de la boquilla de corte, en
sustitución del cabezal que incorpora la boquilla de corte el cual es giratorio.
Descripción de la Invención.
La invención preconizada comprende un sistema de
alimentación de la boquilla de corte, de especial aplicación en robots de los utilizados para el corte de materiales varios, dicho sistema incluye una manguera para el traslado del agua desde los medios de generar
presión en el mismo hasta alcanzar valores de 3.800 bars aproximadamente, incorporados al robot, o no, y que
discurre dicha manguera por un orificio previsto en los medios de giro de uno de los brazos, para acabar por uno de sus extremos en la parte extrema del brazo último del robot, el cual acopla en dicho extremo al configurarse en forma de anillo el cabezal que.incluye la boquilla de corte propiamente dicha.
La utilización de este sistema de traslación del agua a presión, no seria posible sin proteger
debidamente la manguera del agua de esfuerzos y tensiones que se generan con el movimiento de rotación de los brazos, para ello se salvaguarda la manguera en la parte final de su recorrido mediante el
correspondiente muelle y/o espiral, asi como con unos medios de compensación de esfuerzos consistentes en un soporte guia de dicha manguera, y un muelle, que
rodeando la manguera se sitúa entre los medios de giro de uno de los brazos, y el soporte guia fijado a la manguera mediante medios convencionales.
Otros detalles y características se irán poniendo de manifiesto en el transcurso de la descripción que a continuación se da, en la que se hace referencia a los dibujos que a esta memoria se acompañan, en los que se muestra a titulo ilustrativo pero no limitativo una
representación gráfica de la invención, la cual puede ser llevada a la practica con todo tipo de materiales
adecuados a las características citadas.
Descripción de las figuras.
La figura n° 1 es una perspectiva de un robot (10) que llamaremos a efectos de la invención como
convencional, dotado de brazos (13,15), con un cabezal (22) equipado con una boquilla de corte (23).
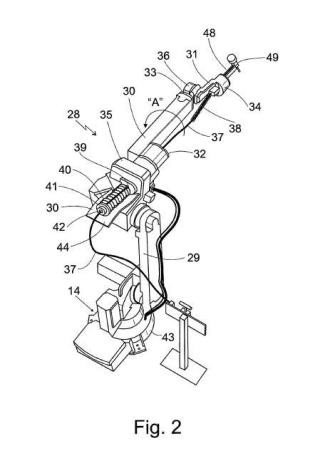
La figura n° 2 es una perspectiva del robot (28) al que se ha equipado con el sistema objeto de la
invención, dotado de brazos (29), (30), y (31), pasando la manguera del agua (37) por el orificio (39), y el
extremo de (37) se acopla al extremo (34) del brazo (31) alimentando la boquilla de corte (49).
La figura n° 3 es una perspectiva del brazo (30) y (31), acoplándose al extremo (34) del brazo (31), la manguera (37) con el auxilio del conjunto de fijación (46) y este último con la pletina (47) al extremo (34) del citado brazo (31).
La figura n° 4 es una vista frontal en alzado del cabezal (48) y boquilla de corte (49).
La figura n° 5 es una perspectiva del robot (28) visto lateralmente, en la que se aprecia como el cabezal
(48) puede girar respecto del brazo (30) sin tensión de la manguera (37).
Sigue a continuación una relación de las distintas partes de la invención que se encuentran en las figuras que siguen y que se localizan con la ayuda de los números que siguen; (10) robot convencional, (11) base del robot, (13) brazo, (14) medios de giro, (15) brazo, (16) serpentín de aire, (17) soporte, (18) serpentín de agua, (19) serpentín de agua, (20) pletina, (21) serpentín de agua, (22) cabezal, (23) boquilla de corte, (24) manguera, (25,26,27) puntos de articulación y giro, (28) robot, (29) primer brazo, (30) segundo brazo, (31) tercer brazo, (32-33) extremos del segundo brazo (30), (34) extremo del tercer brazo (31), (35) medios de giro del segundo brazo (30), (36) medios de giro del tercer brazo (31), (37) manguera del agua, (38) muelle,
| (39) orificio, | (40) muelle, (41) | soporte guia, | (42) | ||
| orificio, | (43) | base del | robot (28), | (44) protector, | (45) |
| cavidad, | (46) | conj unto | de fijación, | (47) pletina, | (48) |
cabezal, (49) boquilla, (50) orificio, (51) tornillos.
Descripción de una de las realizaciones de la Invención.
En una de las realizaciones correspondientes al estado de la técnica y tal y como puede verse en la
figura n° 1, un robot convencional (10) comprende entre otros elementos una base (11), la cual se inmoviliza al suelo por cualquier medio convencional, la cual incorpora un primer brazo (13) con sus medios de giro (14), articulándose en el extremo del brazo (13) un segundo brazo (15), encontrándose en el extremo de dicho segundo brazo (15), un cabezal (22) que incorpora la boquilla de corte (23) , por cuyo extremo sale el chorro
de agua a presión.
El grupo de presión sobre el agua se incorpora en la base de robot (10) o en sus inmediaciones,...
Reivindicaciones:
Ia - "SISTEMA DE TRANSMISION FLEXIBLE DE AGUA PARA ROBOTS" de los que constan de dos o más brazos articulados y con medios de giro relativo entre brazos, dotado el brazo más extremo de un cabezal el cual incorpora una boquilla para la salida de un liquido a presión para el corte de materiales, caracterizado en que dicho sistema comprende una manguera (37) que procedente de la base (43) de un robot (28) atraviesa los medios de giro (35) relativos del segundo brazo (30) respecto del primer brazo (29), hasta llegar al tercer brazo (31) donde se acopla al cabezal (48) y su boquilla (49), girando dicho cabezal (48) respecto del tercer brazo (31), y disponiendo dicho sistema unos medios de compensación de tensión que soporta dicha manguera (37).
2 a - "SISTEMA DE TRANSMISION FLEXIBLE DE AGUA PARA ROBOTS" según la Ia reivindicación, caracterizado en que los medios de compensación de tensión la manguera (37) es un muelle (38), situado entre los extremos (32) del segundo brazo (30), y el extremo (34) del tercer brazo (31), rodeando dicho muelle (38) la superficie exterior de dicha manguera (37).
3 a - "SISTEMA DE TRANSMISION FLEXIBLE DE AGUA PARA
ROBOTS" según las Ia y 2a reivindicaciones,
caracterizado en que los medios de compensación de tensión de la manguera (37) comprenden asi mismo un protector (44) situado en los medios de giro (35), sobre los que se apoya un muelle (40) que rodea dicha manguera (37), encajándose el muelle (40) entre los medios de
giro (35) y el soporte guía (41).
4 a - "SISTEMA DE TRANSMISION FLEXIBLE DE AGUA PARA
ROBOTS" según la Ia reivindicación, caracterizado en que
la manguera (37) atraviesa los medios de giro (35) al
haberse previsto en el mismo del orificio (39).
a - "SISTEMA DE TRANSMISION FLEXIBLE DE AGUA PARA
ROBOTS" según la Ia reivindicación, caracterizado en que
la manguera (37) discurre a lo largo del segundo brazo
(30), desde la base (43) del robot (28) al orificio (39)
presente en los medios de giro (35).
6 a - "SISTEMA DE TRANSMISION FLEXIBLE DE AGUA PARA
ROBOTS" según la Ia reivindicación, caracterizado en que
la manguera (37) atraviesa el extremo (32) del segundo
brazo (30) y el extremo (34) del tercer brazo (31).
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Funda protectora de robot con una conexión rebordeada, del 10 de Junio de 2020, de Dürr Systems AG: Funda protectora de robot para un robot de revestimiento , en particular un robot de pintura , con a) un elemento de conexión […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Aparato y sistema de brazo articulado, del 8 de Abril de 2020, de VANRX Pharmasystems Inc: Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato: […]
Sistema de traslación, del 8 de Abril de 2020, de SW Automation GmbH: Sistema de traslación para un dispositivo de manejo que cuente al menos con un elemento de guía y al menos con un cuerpo de carro que dicho […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
Sistema de carga eléctrica para un robot, del 18 de Marzo de 2020, de Locus Robotics Corp: Un sistema de carga eléctrica, que comprende: un conjunto de cargador eléctrico, incluyendo: una base del cargador a acoplarse a una fuente de energía eléctrica; […]