SISTEMA DE SIMULACIÓN DE UN SISTEMA AEROTRANSPORTADO DE ADQUISICIÓN DE IMÁGENES MEDIANTE SENSORES DE EMPUJE.
Sistema de simulación de un sistema aerotransportado de adquisición de imágenes mediante sensores de empuje que comprende una cámara espectral (1) de ensayo de línea encima de un objeto a examinar,
y un dispositivo de desplazamiento (2) para desplazar la cámara espectral (1) a lo largo de un trayecto longitudinal (L) y que comprende medios de simulación (5) de movimientos para simular los movimientos irregulares a los que está expuesto un sensor espectral aerotransportado cuando viaja a lo largo de una línea de exploración, comprendiendo los medios de simulación (5) primeros medios actuadores (5a) para conferir a la cámara espectral (1) primeros movimientos oscilantes con respecto a un eje transversal al trayecto longitudinal (L), y segundos medios actuadores (5b) para conferir a la cámara espectral (1) segundos movimientos oscilantes con respecto al trayecto longitudinal (L).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201030948.
Solicitante: UNIVERSIDAD DE EXTREMADURA.
Nacionalidad solicitante: España.
Inventor/es: MARTÍNEZ COBO,Pablo Juan, PÉREZ UTRERO,Rosa María, VALENCIA CORRALES,David, PANIAGUA VIVAS,Rodrigo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G09B9/30 FISICA. › G09 ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS. › G09B MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS, SORDOS O MUDOS; MODELOS; PLANETARIOS; GLOBOS; MAPAS GEOGRAFICOS; DIAGRAMAS. › G09B 9/00 Simuladores para la enseñanza o el entrenamiento. › Simulación de la visión desde la aeronave.
Fragmento de la descripción:
realizar simulaciones de de la adquisición de imágenes mediante cámaras de línea aerotransportadas efectuadas
1 O mediante sensores espectrales, tales corno sensores de línea, pancromáticos, RGB, rnultiespectrales o hiperespectrales. ANTECEDENTES DE LA INVENCIÓN La teledetección se usa en una pluralidad de sectores para obtener irnágenes remotas de la superficíe terrestre estas 15 imágenes pueden ser de una sola banda o incluir información de corre, spondientes cada una a una de línea , pancromática, RGB, rnultiespectral o incluir información de varias bandas que se combinan para obtener cubos de datos que se evalúan para el análisis de las características de determinados objetos de la 20 superficie terrestre, terrenos, edificios, cultivos, superficies acuáticas e~ 0 Asi, se emplean sensores de empuje espectrales para adquirir imágenes espectrales deaerotransportados dístíntas escenas. Un sensor de empuje ("pushbroom") está 25 provisto de una cadena de detectores, corno por ejemplo de sensores CCD ("Charged Coupled Device" dispositivo de cargas interconectadas) que cubre una línea del campo de vista del sensor. En cada momento se explora una línea completa de la escena, línea que se va desplazando sirnultánearnente con la 30 plataforma de la aeronave en la que está colocado el sensor de empuje de manera que se produce un barrido del terreno a explorar. A la hora de adquirir las imágenes, el sensor de empuje se ve expuesto a los movimientos que habitualmente experimenta una aeronave como son los cabeceos (=movimientos 35 oscilantes con respecto a un eje transversal al eje longitudinal de la aeronave) , alabeos (=movimientos oscilantes con respecto a un eje longitudinal correspondiente al eje longitudinal de la aeronave) y guiñadas (=movimientos de giro con respecto a un eje vertical respecto del eje longitudinal de la aeronave) que son susceptibles de afectar la calidad y 5 exactitud de las imágenes corno tales y la evaluación de las mismas. Para corregir estos efectos, se realizan medidas de los ángulos subtendidos por la normal al punto de la escena sobre el que se encuentra el sensor en un instante y el punto real 10 medido por el sensor en ese mismo instante a causa de estos movimientos de aleteo y cabeceo. El aprendizaje de estas técnicas de corrección geométrica es muy importante, pero la evaluación de la bondad de la corrección geométrica es muy difícil de evaluar. 15 Actualmente se utilizan imágenes correspondientes a una zona de orografía simple y próxima al laboratorio en la que puedan realizarse medidas reales de la posición de los objetos de la escena, tales corno, por ejemplo, edificios, carreteras, etc. ("verdad terreno") . La utilización de vuelos reales de 20 escenas próximas al laboratorio tiene un coste elevado. Si bien existe una gran variedad de imágenes disponibles en repositorios y bases de datos, estas imágenes no siempre disponen de la información geométrica necesaria para la corrección geométrica de las mismas ni corresponden a una 25 geografía adecuada. Asimismo, las imágenes contenidas en los repositorios se utilizan para la obtención de muy variados tipos de información sobre la escena y para la validación de los métodos diseñados en el análisis de imágenes. En el caso de las imágenes hiperespectrales una de las aplicaciones más 3 O importantes es el análisis subpixel, en el que se calcula la abundancia de cada uno de los elementos presentes en un pixel, estos los resultados de este análisis dependen de la exactitud con la que conozcamos la posición del pixel al que la cámara está apuntando. Otros problemas resultan de las variaciones de 35 la luminosidad que se producen en estos estudios en vuelos reales y que pueden influir en los espectros de las imágenesobtenidas y que pueden desvirtuar o al menos afectar negativamente la determinación correcta de la influencia de
esos movimientos sobre las imágenes obtenidas.
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención tiene por objeto supera.r los inconvenientes del estado de la técnica más arriba mencionados, mediante un sistema de simulación de un sistema aerotransportado de adquisición de imágenes mediante sensores de empuje a lo largo de líneas de exploración expuestos a movimientos irregulares, que comprende
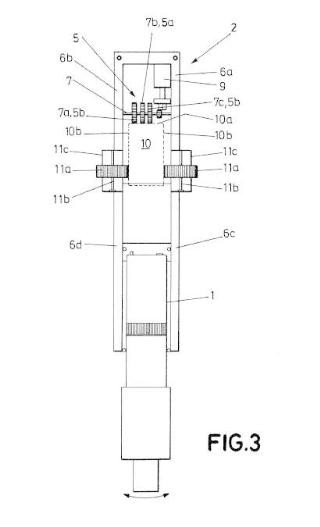
al menos una cámara espectral (1) de ensayo de línea seleccionada entre cámaras pancromáticas, RGB, multiespectrales e hiperespectrales, desplazable por un trayecto longitudinal (L) encima de un objeto a examinar, siendo la cámara espectral (1) conectable a una unidad de proceso de datos (4) para procesar imágenes del objeto a examinar obtenidas por la cámara espectral (1) a lo largo del trayecto longitudinal (L) ;
un dispositivo de desplazamiento (2) provisto de medios motrices (7, 9) para desplazar la cámara espectral (1) a lo largo del trayecto longitudinal (L) , controlable por una unidad de control ( 3) que controla parámetros de avance del dispositivo de desplazamiento (2) ;
estando caracterizado el sistema de simulación porque
el dispositivo de desplazamiento comprende medios de simulación de movimientos para simular, cuando la cámara espectral se desplaza por el trayecto longitudinal, los
movimientos irregulares a los que está expuesto un sensor espectral aerotransportado cuando viaja a lo largo de una línea de exploración;los medios de simulación comprenden al menos primeros medios actuadores para conferir a la cámara espectral primeros movimientos oscilantes con respecto a un eje transversal al trayecto longitudinal (es decir, movimientos que simulan los cabeceos de una aeronave) , y segundos medios actuadores para conferir a la cámara espectral segundos movimientos oscilantes con respecto al trayecto longitudinal (es decir, movimientos que simulan los alabeos de una aeronave) ; la unidad de control comprende medios de control de velocidad para controlar velocidades de desplazamiento y 5 posiciones de parada del dispositivo de desplazamiento a través de los medios motrices en función de un programa de ensayo. El término "cámara espectral" tal corno se utiliza a lo largo de este documento, se refiere a cámaras de línea, 10 pancromáticas, RGB, rnultiespectrales y hiperespectrales. La cámara espectral puede estar montada verticalmente en el dispositivo de desplazamiento de tal forma que, cuando el dispositivo de desplazamiento se desplaza, la cámara espectral torna imágenes del objeto a examinar. 15 En una realización preferente de la invención, el dispositivo de desplazamiento comprende una carcasa con sendas paredes laterales entre las que están acoplados giratoriarnente un eje motriz provisto de al menos una rueda motriz y al menos un eje de apoyo provisto de una pluralidad de ruedas de apoyo, 2 O un motor eléctrico montado en la carcasa y conectado al eje motriz, una guía horizontal sobre la que se apoyan dichas ruedas, y medios de montaje para montar la cámara espectral. En esta realización preferente, los primeros medios actuadores comprenden al menos una rueda motriz de leva montada en uno de 25 dichos ejes, los segundos medios actuadores comprenden al menos dos ruedas de apoyo excéntricamente montadas en al menos uno de los ejes, y las ruedas están apoyadas y ruedan sobre la superficie superior de la guía horizontal. Los primeros medios actuadores pueden comprender al 30 menos una rueda motriz de leva central y/o al menos una rueda de apoyo de leva central, mientras que los segundos medios actuadores pueden comprender al menos una pareja de ruedas motrices...
Reivindicaciones:
l. Sistema de simulación de un sistema aerotransportado de adquisición de imágenes mediante sensores de empuje a lo largo de líneas de exploración expuestos a movimientos irregulares, que comprende al menos una cámara espectral (1) de ensayo de línea seleccionada entre cámaras pancromáticas, RGB, multiespectrales y hiperespectrales, desplazable por un trayecto longitudinal (L) encima de un objeto a examinar, siendo la cámara espectral (1) conectable a una unidad de proceso de datos (4) para procesar imágenes del objeto a examinar obtenidas por la cámara espectral (1) a lo largo del trayecto longitudinal (L) ; y un dispositivo de desplazamiento (2) provisto de medios motrices (7, 9) para desplazar la cámara espectral (1) a lo largo del trayecto longitudinal (L) ,
controlable por una unidad de control (3) que controla parámetros de avance del dispositivo de desplazamiento ( 2) ; caracterizado porque el dispositivo de desplazamiento (2) comprende medios desimulación (5) de movimientos para simular, cuando la cámara espectral ( 1) se desplaza por el trayecto longitudinal (L) , los movimientos irregulares a los que está expuesto un sensor espectral aerotransportado cuando viaja a lo largo de una línea de exploración;
los medios de simulación (5) comprenden al menos primeros medios actuadores (5a) para conferir a la cámara espectral ( 1) primeros movimientos oscilantes con respecto a un eje transversal al trayecto longitudinal (L) , y segundos medios actuadores (5b) para conferir a la cámara espectral (1) segundos movimientos oscilantes con respecto al trayecto longitudinal (L) ;
la unidad de control comprende medios de control de velocidad para controlar velocidades de desplazamiento y posiciones de parada del dispositivo de desplazamiento (2) a través de los medios motrices (7, 9) en función de un programa de ensayo.
2. Sistema según la reivindicación 1, caracterizado porque el dispositivo de desplazamiento (2) comprende además terceros medios actuadores (Se) para conferir a la cámara espectral movimientos de giro con respecto a los ejes vertical y longitudinal al trayecto longitudinal (L) .
3. Sistema de simulación, según la reivindicación 1 ó 2,
caracterizado porque
el dispositivo de desplazamiento (2) comprende
una carcasa (6) con sendas paredes laterales (6a, 6b)
entre las que están acoplados giratoriamente un eje motriz (7) provisto de al menos una rueda motriz (7a, 7b, 7c) y al menos
un eje de apoyo ( 8) provisto de una pluralidad de ruedas de apoyo (8a, 8b, 8c) ; un motor eléctrico (9) montado en la carcasa ( 6) y conectado al eje motriz (7) ; una guía horizontal (1 O) sobre la que se apoyan dichas ruedas (7a, 7b, 7c, 7d) ; y porquelos primeros medios actuadores (5a) comprenden al menos una rueda de leva (7b, 8b) excéntricamente montada en uno de dichos ejes (7, 8) ;
los segundos medios actuadores (5b) comprenden al menos dos ruedas de apoyo (7a, 7c, 8a, 8c) excéntricamente montadas en al menos uno de los ejes (7, 8) ; y
las ruedas (7a, 7b, 7c, 8a, 8b, 8c) se apoyan y ruedan sobre la superficie superior (lOa) de la guía horizontal (10) .
4. Sistema de simulación, según la reivindicación 3, caracterizado porque los primeros medios actuadores (5a) comprenden una rueda motriz de leva central (7b) .
5.
6. Sistema de simulación, según la reivindicación 3, caracterizado porque los primeros medios actuadores (5a) comprenden al menos una rueda motriz de leva central (7b) y al menos una rueda de apoyo de leva central (8b)
7. Sistema de simulación, según una de las reivindicaciones 3 a 6, caracterizado porque los segundos medios actuadores (5b) comprenden al menos una pareja de ruedas motrices laterales (7a, 7c) .
8. Sistema de simulación, según una de las reivindicaciones 3 a 6, caracterizado porque los segundos medios actuadores (5b) comprenden al menos una pareja de ruedas de apoyo laterales (8a, 8c) .
9. Sistema de simulación, según una de las reivindicaciones 3 a 6, caracterizado porque los segundos medios actuadores (5b) comprenden una pareja de ruedas motrices laterales (7a, 7c) y una pareja de ruedas de apoyo laterales (8a, 8c) .
10. Sistema de simulación, según una de las reivindicaciones 3 a 9, caracterizado porque las ruedas de motrices (7a, 7c) y las ruedas de apoyo (8a, 8c) excéntricamente montadas son ruedas de leva.
11. Sistema de simulación, según una de las reivindicaciones 3 a 10, caracterizado porque el dispositivo de desplazamiento
(2) comprende además un sistema de guiado (11) que comprende al menos una pareja de ruedas de guiado lateral (11a, 11e) que ruedan en respectivos ejes verticales (11b) de sendas piezas de soporte (11c, 11d) montados en lados opuestos de la carcasa
(8) , y porque las ruedas de guiado lateral (11a, 11e) ruedan sobre superficies laterales (10b) opuestas de la guía horizontal (1 O) •
12. Sistema, según la reivindicación 11' caracterizado
porque el sistema de guiado (11) comprende una primera pareja de ruedas de guiado lateral (11a) dispuestas en los respectivos ejes verticales (11b) en sendas primeras piezas de soporte (11c) montadas en lados opuestos de una primera parte extrema (2a) del dispositivo de desplazamiento (2) , y una segunda pareja de ruedas de guiado lateral (11e) dispuestas en sendas segundas piezas de soporte (11d) montadas en lados opuestos de una segunda parte extrema (2b) del dispositivo de desplazamiento (2) .
13. Sistema, según la reivindicación 11 ó 12, caracterizado porque los terceros medios actuadores (Se) comprenden al menos una pareja de ruedas de guiado lateral (11a, 11e) excéntricamente montadas en sus respectivos ejes verticales
(11b) .
14. Sistema, según la reivindicación 13, caracterizada porque las ruedas de guiado lateral (11a, 11e) excéntricamente montadas son ruedas de leva.
15.
Patentes similares o relacionadas:
SIMULADOR DE VUELO ROBÓTICO TÁCTICO Y ACROBÁTICO, del 11 de Junio de 2020, de INDUSTRIAL ROBOTICS SOLUTIONS MEXICO SA DE CV: La presente invención se refiere a un sistema de simulador integral de vuelo que incluye un brazo robótico industrial que cuenta con seis ejes y un séptimo […]
Maqueta virtual con ayuda portátil háptica, del 22 de Abril de 2020, de Airbus Helicopters España Sociedad Anonima: Método de funcionamiento de una maqueta de simulador de aeronave que reproduce de manera virtual una interfaz hombre-máquina en una aeronave (A) […]
Dispositivo y procedimiento para el funcionamiento de un simulador de vuelo con una impresión especial de realidad, del 29 de Junio de 2016, de GRENZEBACH MASCHINENBAU GMBH: Dispositivo para el funcionamiento de un simulador con impresión especial de realidad para el aprendizaje del dominio de un vehículo que se mueve en la realidad […]
PROCEDIMIENTO DE PRESENTACION VISUAL DE INFORMACIONES CARTOGRAFICAS EN UNA PANTALLA DE AERONAVE., del 16 de Noviembre de 2005, de THALES: Procedimiento de presentación visual, en una pantalla de aeronave, de varias ventanas (2D5, 3D, PV, PH) que representan cada una un aspecto distinto del terreno […]
SIMULADORES DE ENTRENAMIENTO., del 1 de Marzo de 2003, de LOCKHEED MARTIN CORPORATION: UN SISTEMA SIMULADOR, MODULAR, FACILMENTE MONTABLE Y CONFIGURABLE, INCLUYE UNA PLURALIDAD DE KITS PERSONALES PARA EL VEHICULO Y AL MENOS UN BASTIDOR PARA […]
PISTA DE ATERRIZAJE Y DESPEGUE CON BALIZAS LUMINOSAS, PARA MAQUETAS., del 16 de Octubre de 2001, de GARCIA RECIO,EDUARDO: Pista de aterrizaje y despegue con balizas luminosas, para maquetas. Está determinada por una lámina de aluminio o similar que sigue el trazado de la pista formada […]
 PROCEDIMIENTO DE CALIBRACION DE UN SISTEMA DE SEGUIMIENTO DE MIRADA, del 16 de Noviembre de 2008, de THE BOEING COMPANY: Un procedimiento de calibración de un sistema de seguimiento de mirada en relación con un objeto, en el que el sistema de seguimiento de mirada incluye un montaje de […]
PROCEDIMIENTO DE CALIBRACION DE UN SISTEMA DE SEGUIMIENTO DE MIRADA, del 16 de Noviembre de 2008, de THE BOEING COMPANY: Un procedimiento de calibración de un sistema de seguimiento de mirada en relación con un objeto, en el que el sistema de seguimiento de mirada incluye un montaje de […]
 SISTEMA DE SIMULACION DE MOVIMIENTOS EN RED CON MEMORIA COMPARTIDA, del 1 de Abril de 2008, de LAI, YIN-LIANG: Un sistema de simulación de movimientos en red con memoria compartida, que comprende: un ordenador servidor provisto de una memoria común que contiene un conjunto […]
SISTEMA DE SIMULACION DE MOVIMIENTOS EN RED CON MEMORIA COMPARTIDA, del 1 de Abril de 2008, de LAI, YIN-LIANG: Un sistema de simulación de movimientos en red con memoria compartida, que comprende: un ordenador servidor provisto de una memoria común que contiene un conjunto […]