Sistema de seguimiento óptico de amplio campo de visión.
Un sistema de seguimiento óptico para determinar la posición y orientación de un objeto (208) móvil en unsistema de coordenadas de referencia que comprende:
por lo menos un emisor (212) de luz unido a dicho objeto (208) móvil;
por lo menos dos emisores (2041, 2042) de luz distintos situados en una posición (202) fija en un sistema decoordenadas de referencia;
por lo menos un primer detector (210) óptico de amplio campo de visión unido a dicho objeto (208) móvil, incluyendodicho detector óptico de amplio campo de visión:
un sensor (102) óptico, para detectar luz recibida de por lo menos uno de dichos por lo menos dos emisores (2041,2042) de luz; y
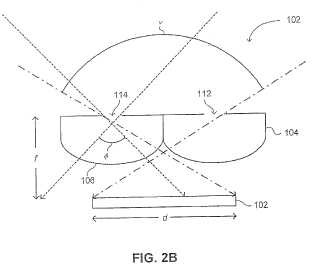
por lo menos dos receptores (106, 104) ópticos, ópticamente acoplados con dicho sensor (102) óptico, incluyendocada uno de dichos receptores (106, 104) ópticos una pupila (112, 114) de entrada, estando dichos receptores (106,104) ópticos espacialmente separados entre sí, proyectando cada uno de dichos receptores (106, 104) ópticos unasección angular diferente de una escena observada sobre dicho sensor óptico;
un segundo detector (206) óptico situado en dicha posición (202) fija en dicho sistema de coordenadas dereferencia; y un procesador (214) de posición y orientación, acoplado con dicho primer detector (210) óptico, condicho segundo detector (206) óptico, con dicho por lo menos un emisor (212) de luz unido a dicho objeto móvil y condichos por lo menos otros dos emisores (2041, 2042) de luz situados en una posición fija, para asociar por lo menosuna representación (232) de uno de dichos por lo menos dos emisores (2041, 2042) de luz situado en una posiciónfija, sobre una imagen (230) adquirida por dicho sensor (102) óptico, con un respectivo receptor óptico que proyectala luz recibida de dicho uno de dichos por lo menos dos emisores (2041, 2042) de luz situado en una posición fija,sobre dicho sensor (102) óptico, según la posición de dicha representación sobre dicha imagen (230).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IL2008/001252.
Solicitante: ELBIT SYSTEMS LTD..
Nacionalidad solicitante: Israel.
Dirección: ADVANCED TECHNOLOGY CENTER HOF HACARMEL P.O. BOX 539 31053 HAIFA ISRAEL.
Inventor/es: YAHAV,DROR, CHARNY,ADI, ZOMMER,SHAHAF, EFRAT,ILAN, BEN-YISHAI,RANI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S3/781 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › Detalles.
- G01S3/783 G01S 3/00 […] › que utilizan la comparación de la amplitud de señales provenientes de detectores o sistemas detectores estáticos.
- G01S3/784 G01S 3/00 […] › que utilizan un mosaico de detectores.
PDF original: ES-2452037_T3.pdf
Fragmento de la descripción:
Sistema de seguimiento óptico de amplio campo de visión Campo de la técnica descrita La técnica descrita se refiere a sistemas de seguimiento, en general, y a sistemas de seguimiento óptico de amplio campo de visión WFOV, del inglés Wide Field Of View) para determinar la posición y orientación de un objeto móvil, en particular.
Antecedentes de la técnica descrita Los sistemas de seguimiento óptico para seguir la posición y orientación de un objeto móvil en un sistema de coordenadas de referencia son conocidos en la técnica. Estos dispositivos de seguimiento emplean detectores ópticos (por ejemplo, dispositivos de carga acoplada) para recoger información acerca de la posición y/o orientación de un objeto móvil. Una configuración para tal dispositivo de seguimiento óptico es fijar uno o varios detectores ópticos en el objeto móvil y fijar un conjunto de emisores de luz (por ejemplo, diodos emisores de luz) en una posición conocida en el sistema de coordenadas. Otra configuración para tal dispositivo de seguimiento óptico es fijar un conjunto de emisores de luz en el objeto móvil y fijar uno o varios detectores ópticos en una posición conocida en el sistema de coordenadas de referencia. Otra configuración más es combinar las configuraciones anteriores y fijar tanto los detectores como los emisores de luz en el objeto móvil en una posición conocida en el sistema de coordenadas de referencia. Los sistemas de seguimiento óptico permiten tomar una decisión automática basada en la posición y/o orientación determinada. Por ejemplo, un piloto puede apuntar a un objetivo moviendo solo su cabeza hacia el objetivo (es decir, el piloto no tiene que mover el avión hacia el objetivo. El sistema de seguimiento óptico determina la orientación (es decir, elevación, azimut y alabeo) del casco que lleva el piloto, en el sistema de coordenadas del avión. Como ejemplo adicional, el sistema de seguimiento óptico puede seguir los movimientos de un usuario de un sistema de realidad virtual (por ejemplo, un juego, un simulador) determinando la posición del usuario.
Sin embargo, un detector óptico colocado en el objeto móvil puede detectar los emisores de luz en el sistema de coordenadas de referencia solo siempre y cuando los emisores de luz estén dentro del campo de visión (FOV) del detector. Por lo tanto, el FOV del sistema de seguimiento óptico (es decir, el intervalo de posiciones en las que el sistema de seguimiento óptico sigue al objeto móvil) está limitado por el FOV del detector óptico. Similarmente, el detector de luz fijo puede seguir al objeto móvil siempre y cuando los emisores de luz unidos al objeto móvil estén dentro del FOV del detector de luz fijo. De este modo, la intersección del FOV del detector de luz móvil, con el FOV del detector de luz fijo, define el espacio de seguimiento del sistema de seguimiento.
Ahora se hace referencia a la Figura 1, que es una ilustración esquemática de un detector óptico, de referencia general 10, que es conocido en la técnica. El detector 10 óptico incluye un sensor 12 óptico ópticamente acoplado a una lente 14. La lente 14 incluye una pupila 16 de entrada. El FOV ! del detector 10 óptico es inversamente proporcional a la relación entre la longitud focal f de la lente 14 y el tamaño d del sensor 12 óptico. Además, la precisión del detector 10 óptico es proporcional a su resolución angular. Por lo tanto, cuando el tamaño del sensor 12 (por ejemplo, número de pixeles) es fijo, incrementar la longitud focal de la lente 14, incrementa la resolución pero disminuye el FOV del detector 10 óptico.
La patente de EE.UU. No. 3.678.283 otorgada a LaBaw, y titulada “Radiation Sensitive Optical Tracker”, se refiere a un sistema para determinar la línea de visión de un piloto con respecto a un punto en una cabina de mando. El seguidor óptico incluye: dos conjuntos de detectores y tres emisores de luz. El primer conjunto de detectores está montado en el casco del piloto. El primer emisor de luz está montado en el casco del piloto. El segundo conjunto de detectores está montado en la cabina de mando, en ese punto. El segundo y tercer emisor de luz están montados en la cabina de mando, igualmente espaciados a ambos lados del ángulo del campo de visión delante del piloto.
Los conjuntos de detectores incluyen fotodetectores laterales capaces de detectar la posición lateral del punto de luz. Los emisores de luz iluminan con una frecuencia de luz que corresponde al máximo intervalo de sensibilidad de los detectores. Los dos emisores de luz montados en la cabina de mando iluminan el detector montado en el casco. El iluminador montado en el casco ilumina el detector montado en la cabina de mando. La determinación de los ángulos de azimut y de elevación, de la línea de visión del piloto, es independiente de la posición del casco en la cabina de mando. La cantidad de alabeo de la cabeza del piloto se calcula por medio de la salida del detector montado en el casco, que detecta los dos emisores de luz montados en la cabina de mando.
La patente de EE.UU. No. 5.767.524 otorgada a Barbier et al., y titulada “Optical Device for Determining the Orientation of a Solid Body”, se refiere a un sistema para determinar la orientación de un primer cuerpo sólido con respecto a un segundo cuerpo sólido. El sistema de determinación de la orientación incluye: tres conjuntos de emisor/detector óptico. Cada conjunto de emisor/detector óptico incluye un emisor óptico y un detector de radiación óptica. Por lo menos un conjunto de emisor/detector está montado en el primer cuerpo sólido. Por lo menos un conjunto de emisor/detector está montado en el segundo cuerpo sólido. En por lo menos uno de los cuerpos sólidos hay montados dos conjuntos de emisor/detector.
El sistema de orientación determina en el primer sistema de referencia, del primer cuerpo sólido, dos líneas rectas que corresponden a la radiación luminosa que viene del segundo sistema de referencia. El sistema de orientación determina en el segundo sistema de referencia, del segundo cuerpo sólido, dos líneas rectas que corresponden a la radiación luminosa que viene del primer sistema de referencia. El conocimiento de la orientación de por lo menos dos líneas rectas distintas en cada uno de los sistemas de referencia da, por cálculo de la matriz der rotación, los tres parámetros de orientación del primer cuerpo sólido con respecto al sistema de referencia del segundo cuerpo sólido.
La patente de EE.UU. 4.585.948 de Schneider et al., titulada “Non-Scanning Integrated Optical System with Wide Field of View Search Capability” describe un sistema óptico multiapertura sin barrido que ve e identifica objetos de interés en una escena. El sistema descrito en D1 incluye un conjunto de lentes, cada una montada en un soporte tubular, una capa de detección, una capa de correlación y una capa de procesado. Cada abertura u ojete está formada de un cilindro con lentes fijas en el cilindro. La luz que entra en el cilindro es recibida por una superficie final de fibras ópticas, que transmite la luz al detector o detectores respectivos asociados a la abertura. Cada abertura individual forma un disco Air y en el respectivo detector o detectores. La correlación, formada de celdas de memoria interconectadas almacena una imagen formada por la recogida de discos Air y detectados por cada ojete. La capa de procesado procesa la imagen almacenada en la capa de correlación para determinar, por ejemplo, la forma de un objeto.
La publicación de solicitud PCT WO 1997/046893 de Chen-Hsing titulada “Remote Position Sensing Apparatus and Method” describe un aparato para determinar las coordenadas de orientación angular de un emisor de radiación puntual con relación a un punto de referencia. El aparato descrito en D1 incluye un sensor de imágenes, que está inclinado en un plano con relación a una base de soporte plano. Una máscara opaca, que tiene una pluralidad de aberturas de rendija, está soportada en paralelo con relación a la base. La radiación que emana de una fuente pasa a través de las rendijas y proyecta líneas en el sensor de imágenes. Dado que el sensor de imágenes está inclinado, las líneas proyectadas están sesgadas con respecto a los lados del sensor. Este sesgo está relacionado con el ángulo de incidencia de la luz en el sensor de imágenes y de este modo con el ángulo del emisor de luz.
Sumario de la presente técnica descrita Es un objetivo de la técnica descrita proporcionar un nuevo sistema que determina la posición y orientación de un objeto móvil en un sistema de coordenadas de referencia.
Según esta técnica descrita, en un sistema de seguimiento óptico se proporciona de este modo un detector óptico... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de seguimiento óptico para determinar la posición y orientación de un objeto (208) móvil en un sistema de coordenadas de referencia que comprende:
por lo menos un emisor (212) de luz unido a dicho objeto (208) móvil;
por lo menos dos emisores (2041, 2042) de luz distintos situados en una posición (202) fija en un sistema de coordenadas de referencia;
por lo menos un primer detector (210) óptico de amplio campo de visión unido a dicho objeto (208) móvil, incluyendo dicho detector óptico de amplio campo de visión:
un sensor (102) óptico, para detectar luz recibida de por lo menos uno de dichos por lo menos dos emisores (2041, 2042) de luz; y
por lo menos dos receptores (106, 104) ópticos, ópticamente acoplados con dicho sensor (102) óptico, incluyendo cada uno de dichos receptores (106, 104) ópticos una pupila (112, 114) de entrada, estando dichos receptores (106, 104) ópticos espacialmente separados entre sí, proyectando cada uno de dichos receptores (106, 104) ópticos una sección angular diferente de una escena observada sobre dicho sensor óptico;
un segundo detector (206) óptico situado en dicha posición (202) fija en dicho sistema de coordenadas de referencia; y un procesador (214) de posición y orientación, acoplado con dicho primer detector (210) óptico, con dicho segundo detector (206) óptico, con dicho por lo menos un emisor (212) de luz unido a dicho objeto móvil y con dichos por lo menos otros dos emisores (2041, 2042) de luz situados en una posición fija, para asociar por lo menos una representación (232) de uno de dichos por lo menos dos emisores (2041, 2042) de luz situado en una posición fija, sobre una imagen (230) adquirida por dicho sensor (102) óptico, con un respectivo receptor óptico que proyecta la luz recibida de dicho uno de dichos por lo menos dos emisores (2041, 2042) de luz situado en una posición fija, sobre dicho sensor (102) óptico, según la posición de dicha representación sobre dicha imagen (230) .
2. El sistema según la reivindicación 1, en el que cada uno de dichos por lo menos dos receptores ópticos tiene una longitud focal diferente.
3. El sistema según la reivindicación 1, en el que dicho segundo detector óptico es un detector óptico de amplio campo de visión que incluye:
un sensor óptico, para detectar luz recibida de dicho por lo menos un emisor de luz; y
por lo menos dos receptores ópticos, ópticamente acoplados con dicho sensor óptico, incluyendo cada uno de dichos receptores ópticos una pupila de entrada, estando dichos receptores ópticos espacialmente separados entre sí, proyectando cada uno de dichos receptores ópticos una sección angular diferente de una escena observada sobre dicho sensor óptico.
4. El sistema según una cualquiera de las reivindicaciones 1 y 3, en el que cada uno de dichos por lo menos dos receptores ópticos es uno de una lente óptica y un receptor de estenopeico.
5. El sistema según la reivindicación 4, en el que el centro de gravedad óptico de dichos por lo menos dos emisores de luz situados en una posición fija está localizado en la pupila de entrada de dicho segundo detector óptico, y en el que dicho procesador de posición y orientación determina el ángulo de alabeo según la posición de las representaciones de dichos por lo menos dos emisores de luz situados en una posición fija, sobre una imagen adquirida por dicho detector óptico unido a dicho objeto móvil.
6. El sistema según una cualquiera de las reivindicaciones 1 y 3, en el que por lo menos dos emisores de luz están unidos a dicho objeto móvil.
7. El sistema según la reivindicación 6, en el que el centro de gravedad óptico de dichos por lo menos dos emisores de luz unidos a dicho objeto móvil está localizado en la pupila de entrada del detector óptico unido a dicho objeto móvil, y en el que dicho procesador de posición y orientación determina el ángulo de alabeo según la posición de las representaciones de dichos por lo menos dos emisores de luz unidos a dicho objeto móvil sobre una imagen adquirida por dicho detector óptico situado en una posición fija.
8. El sistema según la reivindicación 1, en el que dicho por lo menos un emisor de luz unido a dicho objeto móvil es de una forma que exhibe asimetría rotacional alrededor de un eje normal al plano del objeto de dicho emisor de luz, dentro de un intervalo de ángulos deseado.
9. El sistema según la reivindicación 1, en el que dicho por lo menos un emisor de luz unido a dicho objeto móvil y dichos por lo menos dos emisores de luz situados en una posición fija son diodos emisores de luz.
10. Un sistema de seguimiento óptico según la reivindicación 1, en el que dicho procesador de posición y
orientación adicionalmente determina un ángulo de orientación de dicho objeto móvil restando un primer ángulo de un segundo ángulo determinando por ello dicho ángulo de orientación de dicho objeto móvil en dicho sistema de coordenadas de referencia.
11. El sistema según la reivindicación 10, en el que dicho ángulo de orientación es el ángulo de orientación horizontal, y en el que un ángulo de orientación azimutal se aproxima según dicho ángulo de orientación horizontal.
12. El sistema según la reivindicación 10, en el que dicho ángulo de orientación es el ángulo de orientación vertical, y en el que un ángulo de orientación de elevación se aproxima según dicho ángulo de orientación vertical.
13. El sistema según la reivindicación 10, en el que dicho primer ángulo se determina según la respuesta direccional de dicho detector óptico situado en una posición fija, sobre una imagen adquirida de dicho por lo menos un emisor de luz unido a dicho objeto móvil, y
en el que dicho segundo ángulo se determina según la respuesta direccional de dicho detector óptico unido a dicho objeto móvil sobre una imagen adquirida de dicho por lo menos un emisor de luz situado en una posición fija.
14. El sistema según una cualquiera de las reivindicaciones 1 y 3, en el que los ejes ópticos de dichos por lo menos dos receptores ópticos no son paralelos entre sí.
15. El sistema según la reivindicación 1, en el que dicho procesador de posición y orientación asocia dicha por lo menos una representación con un receptor óptico respectivo siguiendo dichas representaciones.
16. El sistema según la reivindicación 1, en el que dicho procesador de posición y orientación asocia dicha por lo menos una representación con un receptor óptico respectivo determinando un factor de calidad para cada asociación entre dicha por lo menos una representación y cada receptor óptico y seleccionando la asociación con el mayor factor de calidad.
17. El sistema según la reivindicación 1, en el que dicho procesador de posición y orientación asocia cada una de dichas representaciones con un correspondiente receptor óptico, según la configuración geométrica de dichos por lo menos dos receptores ópticos.
18. El sistema según la reivindicación 1, en el que dicho sensor óptico se selecciona del grupo que consiste en:
un dispositivo de carga acoplada;
un sensor de semiconductor complementario de óxido metálico;
un dispositivo sensible a la posición; y
un fotodetector lateral.
19. El sistema según la reivindicación 1, en el que,
una superficie reflectora está situada en una posición fija en dicho sistema de coordenadas de referencia en lugar de los por lo menos dos emisores de luz y el por lo menos un detector óptico situados en una posición fija en dicho sistema de coordenadas de referencia, en el que el detector óptico, unido a dicho objeto móvil, detecta la luz reflejada en dicha superficie reflectora, y en el que dicho procesador de posición y orientación determina solo la orientación de dicho objeto móvil en dicho sistema de coordenadas de referencia según la luz incidente sobre dicho detector óptico.
20. El sistema según la reivindicación 19, en el que dos emisores de luz adicionales se fijan en la vecindad de dicha superficie reflectora.
21. El sistema según la reivindicación 19, en el que otro emisor de luz se fija en la vecindad de dicha superficie reflectora y en el que dicho otro emisor de luz es de una forma que no exhibe simetría rotacional alrededor de un eje normal al plano del objeto de dicho emisor de luz, dentro de un intervalo deseado de ángulos.
22. El sistema según la reivindicación 19, en el que dicha superficie reflectora es una superficie reflectora selectiva de la longitud de onda.
23. El sistema según la reivindicación 19, en el que dicha superficie reflectora se selecciona de un grupo que consiste en:
un espejo;
una pantalla de ordenador;
una pantalla de televisión; un parabrisas de vehículo; y
un parabrisas de avión.
24. Un sistema de seguimiento óptico para determinar la posición y orientación de un objeto móvil en un sistema de coordenadas de referencia que comprende:
por lo menos un emisor de luz situado en una posición fija en un sistema de coordenadas de referencia;
por lo menos otros dos emisores de luz unidos a dicho objeto móvil;
por lo menos un primer detector óptico de amplio campo de visión situado en dicha posición fija en dicho sistema de coordenadas de referencia, incluyendo dicho detector óptico de amplio campo de visión:
un sensor óptico, para detectar luz recibida de por lo menos uno de dichos por lo menos dos emisores de luz; y por
lo menos dos receptores ópticos, ópticamente acoplados con dicho sensor óptico, incluyendo cada uno de dichos receptores ópticos una pupila de entrada, estando dichos receptores ópticos espacialmente separados entre sí, proyectando cada uno de dichos receptores ópticos una sección angular diferente de una escena observada sobre dicho sensor óptico;
un segundo detector óptico unido a dicho objeto móvil; y
un procesador de posición y orientación, acoplado con dicho primer detector óptico, con dicho segundo detector óptico, con dicho por lo menos un emisor de luz situado en una posición fija y con dichos por lo menos otros dos emisores de luz unidos a dicho objeto móvil, para asociar cada representación de dichos por lo menos dos emisores de luz unidos a dicho objeto móvil, sobre una imagen adquirida por dicho sensor óptico, con un respectivo receptor óptico que proyecta la luz recibida de dichos por lo menos dos emisores de luz unidos a dicho objeto móvil, sobre dicho sensor óptico.
Patentes similares o relacionadas:
Sistema de detección de localización de fuente de luz, del 6 de Mayo de 2020, de Thales Defense & Security, Inc: Un sistema para rastrear una orientación de un primer objeto , comprendiendo el sistema: un dispositivo de emisión de luz situado con respecto […]
Dispositivo para la asignación óptica de objetivo y la dirección de un misil, del 11 de Septiembre de 2019, de MBDA Deutschland GmbH: Misil para transportar una carga útil, que comprende un sensor óptico para detectar y conducir hacia un objeto objetivo; una unidad de propulsión de vuelo […]
Sensor para detectar y localizar fuentes de radiación láser, del 17 de Julio de 2019, de HENSOLDT Sensors GmbH: Sensor para detectar y localizar fuentes de radiación láser con - un detector sensible a la radiación dispuesto en el campo de la imagen de una óptica […]
Procedimiento y sistema de detección de un tren de impulsos electromagnéticos, dispositivo de guiado electromagnético de una munición hacia un objetivo que comprende un tal sistema de detección, del 29 de Mayo de 2019, de THALES: Procedimiento de detección de un tren de impulsos electromagnéticos emitidos según una ley de incidencia predefinida en un escenario de observación por […]
Procedimiento para la detección de radiación láser pulsada, así como avisador de láser productor de imágenes, del 15 de Mayo de 2019, de HENSOLDT Sensors GmbH: Procedimiento para la detección de radiación láser pulsada con resolución bidimensional de la dirección de incidencia, caracterizado […]
 Buscador láser de baja energía, del 16 de Marzo de 2016, de ISRAEL AEROSPACE INDUSTRIES LTD.: Un procedimiento de detección de una señal reflejada por un blanco señalado por un punto de láser de pulsos, comprendiendo el procedimiento:
recibir una señal que […]
Buscador láser de baja energía, del 16 de Marzo de 2016, de ISRAEL AEROSPACE INDUSTRIES LTD.: Un procedimiento de detección de una señal reflejada por un blanco señalado por un punto de láser de pulsos, comprendiendo el procedimiento:
recibir una señal que […]
 Sistema y método detector de infrarrojos (IR), del 11 de Julio de 2013, de SELEX ES LTD: Un sistema detector de infrarrojos, IR, para la localización de objetivos hostiles, que comprende un detector deconjunto geométricamente ordenado en el plano focal, […]
Sistema y método detector de infrarrojos (IR), del 11 de Julio de 2013, de SELEX ES LTD: Un sistema detector de infrarrojos, IR, para la localización de objetivos hostiles, que comprende un detector deconjunto geométricamente ordenado en el plano focal, […]
DISPOSITIVO DE ALTA PRECISION PARA LA DETERMINACION DEL ANGULO DE INCIDENCIA DE UNA RADIACION LUMINISCENTE, del 3 de Octubre de 2011, de UNIVERSIDAD DE SEVILLA: Cuenta con una oblea de silicio donde se integra una pluralidad de celdas fotosensoras (C1, C2... Cn) provistas de respectivas metalizaciones terminales […]