Sistema robotizado de llenado de cajas con estuches.
Un sistema robotizado para llenar cajas con estuches que comprende un brazo robotizado con una celdilla (2)para encajar los estuches unida solidariamente al extremo del brazo robotizado (1),
o a su mano, caracterizadoporque
la celdilla (2) consiste en un cuerpo básicamente rectangular, abierto por dos de sus lados, en el que los estuchespueden introducirse en uno de los lados, mientras que el otro lado puede introducirse en una caja (4) que recibedichos estuches (3);
y en el que la celdilla (2) comprende, al menos, un tope (22) en cada uno de sus lados derecho e izquierdo para fijarla posición de los estuches en el interior de la celdilla, así como un accionamiento (23) para impedir la deformaciónde la caja (4) al llenarse.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09382143.
Solicitante: Simaupro Galicia, S.L.
Nacionalidad solicitante: España.
Inventor/es: GONZALEZ LOPEZ,RAMON, VELASCO TOEPFER,FRANCISCO, LIS CALDAS,NURIA, VEIGA TORRADO,PABLO, FERNANDEZ SALGADO,JORGE, FERNANDEZ GARCIA,MARIA DEL CARMEN, GONZALEZ RODRIGUEZ,SANTIAGO JORGE, DOMINGUEZ ALVAREZ,JOSE MANUEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
- B65B35/52 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 35/00 Suministro, alimentación, disposición u orientación de artículos a ser empaquetados. › construyendo la pila partiendo de abajo.
- B65B5/06 B65B […] › B65B 5/00 Embalaje de objetos individuales en receptáculo o recipientes, p. ej. sacos, bolsas, cajas, cartones, latas, tarros. › Embalaje de grupos de objetos, cada grupo siendo tratado como un solo objeto.
- B65B5/10 B65B 5/00 […] › Llenado de receptáculos o recipientes, progresivamente o por etapas sucesivas, introduciendo sucesivamente los objetos o capas de objetos.
PDF original: ES-2396018_T3.pdf
Descripción:
Sistema robotizado de llenado de cajas con estuches.
Esta invención se refiere a un sistema robotizado configurado para la formación o llenado de cajas para la introducción de una pluralidad de estuches en las cajas de cartón que constituyen su embalaje final. La presente invención se encuadra dentro del sector de los sistemas robotizados utilizados en el embalaje.
Descripción de la técnica anterior
Actualmente, el llenado o formación de cajas con estuches se realiza a mano, o mediante sistemas automáticos que introducen parte o la totalidad de los estuches empujándolos al interior de la caja, que permanece inmóvil, con accionamientos electro-neumáticos, desconociendo los inventores, expertos en la materia de algún otro sistema automatizado o robotizado que permita su llenado evitando los problemas derivados del trabajo manual o de los mencionados sistemas automáticos que dificultan el cambio de referencia de estuches.
A partir del estado de la técnica se conoce el documento JP 2004268976 que describe un robot para el llenado de cajas. Una pluralidad de artículos se transportan por un transportador de artículos y se apilan repetidamente, un robot agarra el artículo y rellena el estuche mediante una pluralidad de repeticiones. El estuche se mantiene en un estado inclinado para el llenado de artículos con el fin de mantener los artículos cargados previamente en una postura estable. Una esquina de la cara del fondo se inclina hasta su posición inferior con un medio de inclinación equipado con un medio de elevación y un medio de rotación. Ya que los artículos pueden descansar sobre las dos paredes laterales adyacentes a la esquina inferior, los artículos pueden cargarse en el estuche que corresponde a un patrón de estuche diferente.
Explicación de la invención Para solucionar el problema técnico derivado de la falta de automatización del llenado o formación de cajas con estuches y de los costosos cambios de referencia en los sistemas automáticos actuales, se presenta el sistema de formación de cajas de estuches que comprende esencialmente un brazo robotizado con un elemento de encaje de los estuches o celdilla, la cual se halla unida solidariamente con el extremo del brazo robotizado o mano y en donde dicha celdilla consiste en un cuerpo esencialmente rectangular, abierto sobre dos de sus laterales, en el que los estuches pueden introducirse en uno de los lados, mientras que el otro lado puede introducirse en una caja que recibe dichos estuches; y en donde la celdilla comprende un tope de los estuches en cada uno de sus lados derecho e izquierdo, así como un accionamiento para impedir la deformación de la caja en su formación o llenado.
Gracias al sistema así descrito se consigue que, gracias a que el sistema se sitúa al final de la cinta transportadora de los estuches, estos vayan rellenando la celdilla fila a fila hasta que, finalmente, y cuando la celdilla se ha rellenado, con un simple giro de la muñeca del robot, los estuches caigan en la caja, llenándola sin intervención humana.
A lo largo de la descripción y las reivindicaciones la palabra "comprende" y sus variantes no pretenden excluir otras características técnicas, aditivos, componentes o etapas. Para los expertos en la técnica, a menudo se desprenderán otros objetos, ventajas y características de la invención a partir de la descripción. Los siguientes ejemplos y dibujos se proporcionan a modo de ilustración, y no se pretende que sean limitativos de la presente invención.
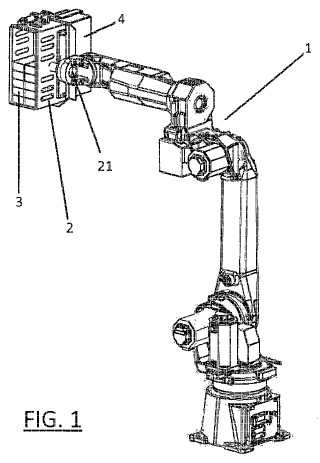
Breve descripción de las figuras La figura 1 muestra una vista general del sistema robotizado de formación de cajas con estuches, objeto de esta invención.
La figura 2 muestra una vista en detalle de la celdilla que, junto con el brazo robotizado, conforma el sistema objeto de esta invención.
Realización preferente de la invención Como se muestra en la figura 1, el sistema robotizado objeto de la presente invención comprende, al menos, un brazo robotizado (1) y un elemento de encaje de los estuches, o celdilla (2) solidariamente unida al brazo robotizado (1) por su extremo, o mano, gracias al soporte de muñeca del robot (21) que está situado en uno de los laterales de la celdilla.
En la figura 2 puede observarse como la celdilla (2) es un elemento básicamente rectangular, abierto por dos de sus laterales, en donde por uno de ellos, que se denominará delantero, se introducen los estuches (3) , mientras que por el otro, que se denominará trasero, es apto para introducirse en la caja (4) que recibe dichos estuches (3) . Igualmente, la celdilla (2) comprende un tope (22) por cada lateral derecho e izquierdo, que puede accionarse neumáticamente, así como un accionamiento (23) para impedir la deformación de la caja (4) en su formación o llenado y para retenerla o mantenerla unida a la celdilla, en donde dicho accionamiento (23) comprende, a su vez, un pistón neumático (231) y una pestaña o seguro (232) que retiene la caja (4) externamente por el lado correspondiente al fondo de la caja.
En el funcionamiento habitual del sistema, la alimentación de los estuches (3) se realiza por medio de una cinta transportadora, no mostrada en las figuras adjuntas, en la que los estuches (3) se colocan adecuadamente sobre dicha cinta a través de las barras guía situadas en ambos laterales de ésta, de tal forma que en el movimiento normal de la cinta, las barras guía fuercen la posición correcta de los estuches (3) sobre la cinta transportadora, dirigiéndolos hacia la celdilla (2) , situada en el extremo de la cinta transportadora.
La celdilla (2) es de unas dimensiones proporcionales a la caja (4) en la que se va a introducir, de tal forma que pueda insertarse, en parte, en la caja (4) inmovilizándola. Por otro lado, como se ha descrito anteriormente, los estuches (3) se van introduciendo en la celdilla (2) gracias al movimiento de la cinta y a su colocación sobre ésta, rellenando la celdilla fila a fila.
Con el fin de comenzar una nueva fila de estuches (3) en la celdilla, un detector (221) dispuesto en la celdilla (2) o entre la celdilla (2) y el extremo de la cinta transportadora capta que la fila está completa o que todos los estuches que forman cada fila ya se han introducido; después el brazo robotizado (1) hace retroceder ligeramente a la celdilla (2) y la hace descender la medida precisa del estuche (3) de tal forma que la siguiente fila pueda colocarse sobre la parte superior de la anterior dentro de la celdilla (2) .
Cuando la celdilla (2) está llena, los topes longitudinales (22) dispuestos en ambos lados izquierdo y derecho de la celdilla (2) , que se configuran para fijar la posición de los estuches (3) dentro de la celdilla (2) , se desbloquean, y con un movimiento de giro de la mano del robot (1) que se transmite a la celdilla (2) por el soporte de la muñeca (21) , se vuelca el conjunto de estuches (3) en la caja (4) encajada en la celdilla.
El brazo robotizado (1) se mueve hasta una posición precisa e introduce la celdilla (2) en la caja (4) con el accionamiento (23) abierto. El pistón neumático (231) se acciona para retener la caja y de nuevo el brazo robotizado (1) se mueve para desplazar la celdilla (2) delante de una cinta transportadora y realizar un nuevo ciclo de llenado.
Reivindicaciones:
1. Un sistema robotizado para llenar cajas con estuches que comprende un brazo robotizado con una celdilla (2) para encajar los estuches unida solidariamente al extremo del brazo robotizado (1) , o a su mano, caracterizado porque
la celdilla (2) consiste en un cuerpo básicamente rectangular, abierto por dos de sus lados, en el que los estuches pueden introducirse en uno de los lados, mientras que el otro lado puede introducirse en una caja (4) que recibe dichos estuches (3) ; y en el que la celdilla (2) comprende, al menos, un tope (22) en cada uno de sus lados derecho e izquierdo para fijar la posición de los estuches en el interior de la celdilla, así como un accionamiento (23) para impedir la deformación de la caja (4) al llenarse.
2. El sistema robotizado que se ha definido en la reivindicación 1, caracterizado porque la unión entre el brazo robotizado (1) y la celdilla (2) comprende un soporte de muñeca del robot (21) dispuesto en uno de los lados de la celdilla (2) .
3. El sistema robotizado que se ha definido en la reivindicación 1 y 2, caracterizado porque los topes (22) se accionan.
4. El sistema robotizado que se ha definido en las reivindicaciones anteriores, caracterizado porque el propio accionamiento (23) comprende un pistón neumático (231) y una pestaña o seguro (232) que retiene la caja (4) externamente por el lado que corresponde al fondo de la caja.
5. El sistema robotizado que se ha definido en las reivindicaciones anteriores, caracterizado porque la alimentación de los estuches (3) se realiza por medio de una cinta transportadora, mientras que los estuches (3) se colocan adecuadamente sobre dicha cinta a través de barras guía dispuestas en ambos lados de ésta, de tal forma que en el movimiento normal de la cinta, las barras guía fuercen la posición correcta de los estuches (3) sobre la cinta, dirigiéndolos hacia la celdilla (2) colocada en el extremo de la cinta.
6. El sistema robotizado que se ha definido en las reivindicaciones anteriores, caracterizado porque la celdilla (2) es de unas dimensiones proporcionales a la caja (4) en la que se va a introducir, de tal forma que pueda insertarse en la caja (4) , al menos parcialmente, inmovilizándola.
7. Procedimiento para llenar una caja por medio del sistema robotizado de la reivindicación 1, en el que éste comprende al menos una etapa de introducir los estuches (3) en la celdilla fila a fila; y cuando un detector (221) dispuesto en la celdilla (2) capta que una fila está completa, entonces, el brazo robotizado (1) hace retroceder ligeramente a la celdilla (2) y la hace descender a lo largo de la longitud precisa de un estuche (3) , de tal forma que la siguiente fila pueda superponerse a la anterior dentro de la celdilla (2) .
8. El procedimiento robotizado que se ha definido en la reivindicación 7, caracterizado porque, cuando la celdilla (2) está llena, los topes longitudinales (22) dispuestos en ambos lados izquierdo y derecho de la celdilla (2) , que se configuran para fijar la posición de los estuches (3) dentro de la celdilla (2) , se desbloquean, y con un movimiento de giro de la mano del robot que se transmite a la celdilla (2) por el soporte de la muñeca (21) del brazo robotizado (1) , se vuelca el conjunto de los estuches (3) en una caja (4) encajada en la celdilla.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]