Sistema y procedimiento para preparar mandriles de bobinado para formar bobinas.
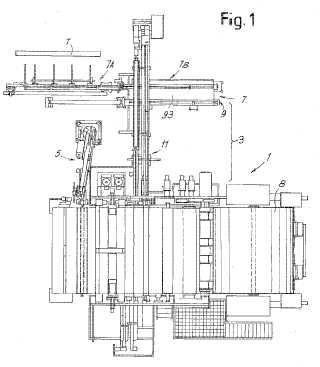
Un sistema (3) para preparar mandriles de bobinado con núcleos de bobinado insertados sobre los mismos ybloqueados sobre ellos en los cuales formar bobinas (BB) de material en banda,
que comprende en combinación:
- un robot (5);
- un conjunto de corte (7) para cortar un tubo para formar núcleos de bobinado tubulares de una longitudaxial que se puede ajustar;
- una estación (11) para distanciar axialmente mutuamente los núcleos de bobinado tubulares (AT)insertados en un mandril de bobinado (A);
- un conjunto de inserción (9) para insertar los mandriles de bobinado (A) en el interior de una serie de dichosnúcleos de bobinado tub 15 ulares previamente cortados y axialmente alineados (AT);
en el que dicho mismo robot (5) está instalado y controlado para: la extracción de dicho mandil (A) de bobinaspreviamente formadas (BB) de material en banda; la inserción de dicho mandril (A) en un conjunto de núcleos debobinado tubulares (AT) previamente cortados al tamaño y axialmente alineados; la transferencia de dicho mandil debobinado (A) con los núcleos de bobinado tubulares (AT) insertados sobre el mismo al interior de una máquina derebobinar (1) para formar dichas bobinas (BB) de material en banda alrededor de dichos núcleos de bobinadotubulares (AT).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IT2007/000483.
Solicitante: A. CELLI NONWOVENS S.P.A..
Inventor/es: ACCIARI, GIUSEPPE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65H18/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65H MANIPULACION DE MATERIALES DELGADOS O FILIFORMES, p. ej. HOJAS, BANDAS, CABLES. › B65H 18/00 Enrollado de bandas. › en los que la energía se aplica al huso de la bobina.
- B65H19/30 B65H […] › B65H 19/00 Cambio de la bobina. › Elevación, transporte o retirada de la bobina; Inserción del núcleo.
PDF original: ES-2448493_T3.pdf
Fragmento de la descripción:
Sistema y procedimiento para preparar mandriles de bobinado para formar bobinas Campo técnico La presente invención se refiere a mejoras de los sistemas para la manipulación de mandriles de bobinado para bobinar materiales en banda en bobinas y los procedimientos relacionados.
Estado de la técnica En la conversión de materiales en banda continua, tales como papel, tejido sin tejer, papel de seda y productos similares, una máquina de producción continua generalmente forma interfaz con un sistema de bobinado, el cual forma bobinas matrices de gran diámetro y una alta longitud axial. A continuación estas bobinas matrices deben ser 15 desenrolladas y vueltas a enrollar para formar bobinas de dimensiones menores. En particular se utilizan las máquinas de bobinar y de rebobinar, las cuales reciben material en banda continúa a partir de la bobina matriz y, cortando el material de la banda en tiras de menor ancho con respecto al ancho del material inicial, forman las bobinas alrededor de núcleos de bobinado tubulares montados y sujetados en mandriles de bobinado. Los mandriles de bobinado pueden ser expandidos por medio de un sistema mecánico o neumático de tal modo que bloquea los núcleos de bobinado tubulares en las posiciones deseadas para formar las bobinas. Una vez estas bobinas han sido formadas, el mandril se contrae de modo que pueda ser extraído de los núcleos de bobinado tubulares, en los cuales se formaron las bobinas, y se reutiliza en un ciclo de bobinado subsiguiente.
La dimensión axial de los núcleos de bobinado tubulares varía según los requisitos específicos que de vez en cuando pueden aparecer durante la fase de producción. Es por lo tanto necesario tener sistemas o aparatos disponibles que permitan una preparación rápida tan automática como sea posible y segura de los núcleos de bobinado tubulares en los mandriles. El documento US – B – 6655629 describe un sistema para la extracción de los mandriles tubulares de las bobinas formadas en una máquina de rebobinar, insertando cada mandril en el interior de un tubo de cartón, plástico o bien otro material, sujetando mutuamente el mandril y el tubo, cortando el tubo en los puntos deseados para transformarlo en un conjunto de núcleos tubulares ya bloqueados en el mandril e introduciendo el mandril con los núcleos tubulares ajustados en el mismo en el interior de la máquina de rebobinar para formar las subsiguientes series de bobinas.
Este sistema flanquea una máquina de rebobinar individual y permite automatizar el ciclo de preparación de los núcleos de bobinado destinados a la propia máquina de rebobinar. En este sistema el corte del tubo y su división en núcleos tubulares individuales tiene lugar por medio de cuchillas que trabajan con el tubo insertado alrededor del mandril de bobinado respectivo y bloqueado en el mismo, de modo que el mandril de bobinado constituye una superficie de presión contra la cual trabajan las cuchillas de corte. Esto causa desventajas debido al desgaste al cual está sometido el mandril debido a la acción de las cuchillas de corte. Adicionalmente, los mandriles deben ser
particularmente resistentes para soportar las tensiones ejercidas por las cuchillas.
Sistemas adicionales para la manipulación de mandriles de bobinado se revelan en los documentos EP – A – 1306332 y WO 2007/096916 A1, el último de los cuales constituye la técnica anterior bajo el artículo 54 (3) del Convenio sobre la Patente Europea (EPC) .
Objetos y resumen de la invención Según un aspecto, un objeto de la presente invención es proporcionar un sistema para la preparación de mandriles de bobinado con núcleos de bobinado insertados sobre los mismos, el cual enteramente o en parte supera las 50 desventajas de los sistemas conocidos.
El objeto de una forma de realización de la invención es proporcionar un sistema para la preparación de mandriles de bobinado, en el cual se evita el problema del desgaste causado al mandril por las cuchillas de corte. Este objeto se consigue con un sistema según las reivindicaciones 1 – 5.
Esencialmente, según una forma de realización, la invención revela un sistema para la preparación de mandriles de bobinado en el cual se forman bobinas de material en banda, que comprende en combinación:
-un robot para la extracción de los mandiles de bobinado a partir de las bobinas formadas; 60
- un conjunto de corte para cortar un tubo para formar núcleos de bobinado tubulares de una longitud axial configurable;
-un conjunto de inserción para insertar los mandriles de bobinado en el interior de una serie de núcleos de 65 bobinado tubulares.
En una posible forma de realización, el robot presenta un cabezal provisto de elementos de agarre para agarrar los mandriles de bobinado y con un elemento de expansión y contracción para expandir/contraer los mandriles de bobinado, para causar la expansión de los mandriles y el bloqueo en los mismos de los núcleos de bobinado tubulares, o la contracción de los mandriles y el desbloqueo de los núcleos de bobinado tubulares de estos mandriles. Este elemento de expansión y contracción puede ser un elemento mecánico. Según una forma de realización actualmente preferida de la invención, este elemento de expansión es un elemento neumático.
Preferiblemente, el elemento de expansión y contracción para expandir/contraer los mandriles de bobinado es capaz de adoptar una posición de funcionamiento y una posición inactiva con respecto a dichos elementos de agarre.
Los elementos para agarrar los mandriles de bobinado, provistos en el cabezal de manipulación del robot, pueden comprender por lo menos un primer par de mordazas y preferiblemente por lo menos dos pares de mordazas alineadas de tal modo que acoplen los mandriles de bobinado en dos puntos separados longitudinalmente. Un elemento de agarre adicional para agarrar la espiga de los mandriles de bobinado puede estar provisto.
Preferiblemente, este elemento de agarre adicional está compuesto de barras de sección integrales con uno de los pares de mordazas provistos para el agarre del mandril de bobinado en su superficie exterior.
En una forma de realización, con el conjunto de inserción para insertar los mandriles de bobinado en el interior de los núcleos de bobinado se asocia un apoyo para los mandriles de bobinado, en el cual el robot coloca cada mandril de bobinado individual antes de que el mandril de bobinado sea introducido en el interior de los núcleos de bobinado. También podría ser posible que la introducción se llevara a cabo sin la ayuda de dicho apoyo, utilizando en cambio el robot para sostener y empujar el mandril en el interior de los núcleos tubulares, los cuales para este propósito están bloqueados en el conjunto de inserción por medio de un elemento de sujeción específico.
En una posible forma de realización, el conjunto de corte comprende: un bastidor de soporte para sostener los tubos con un sistema de giro del tubo que se va a cortar; un elemento de corte; un alimentador para alimentar el tubo que se va a cortar al elemento de corte. Preferiblemente, el bastidor de soporte comprende un par de rodillos con ejes sustancialmente paralelos, por lo menos uno de los cuales puede estar motorizado para transportar dichos tubos al giro.
Según un aspecto diferente, de la presente invención se refiere a un procedimiento para la preparación de mandriles de bobinado mediante la aplicación en los mismos de núcleos de bobinado tubulares para la formación de bobinas de material en banda. Sustancialmente, según una forma de realización el procedimiento de la presente invención comprende las etapas de:
- extracción de un mandril de bobinado de bobinas previamente formadas de material en banda;
- inserción de dicho mandril en el interior de un conjunto de núcleos de bobinado tubulares previamente cortados al tamaño y alineados axialmente;
- transferencia del mandril de bobinado, con los núcleos de bobinado tubulares insertados sobre el mismo, hacia una máquina de rebobinar para la formación de bobinas de material en banda alrededor de dichos núcleos de bobinado tubulares.
En una forma de realización, el procedimiento adicionalmente comprende las etapas de:
- aproximar axialmente dichos núcleos de bobinado tubulares uno hacia el otro;
- después de la inserción de dicho mandil de bobinado en el interior de los núcleos de bobinado tubulares, distanciar los núcleos de bobinado unos de otros antes de insertarlos en el interior de la máquina de rebobinar.
Según un aspecto adicional, un objeto de la invención es proporcionar un robot con un cabezal particularmente adecuado para la manipulación de mandriles... [Seguir leyendo]
Reivindicaciones:
1. Un sistema (3) para preparar mandriles de bobinado con núcleos de bobinado insertados sobre los mismos y
bloqueados sobre ellos en los cuales formar bobinas (BB) de material en banda, que comprende en combinación: 5
-un robot (5) ;
-un conjunto de corte (7) para cortar un tubo para formar núcleos de bobinado tubulares de una longitud
axial que se puede ajustar; 10
-una estación (11) para distanciar axialmente mutuamente los núcleos de bobinado tubulares (AT) insertados en un mandril de bobinado (A) ;
-un conjunto de inserción (9) para insertar los mandriles de bobinado (A) en el interior de una serie de dichos 15 núcleos de bobinado tubulares previamente cortados y axialmente alineados (AT) ;
en el que dicho mismo robot (5) está instalado y controlado para: la extracción de dicho mandil (A) de bobinas previamente formadas (BB) de material en banda; la inserción de dicho mandril (A) en un conjunto de núcleos de bobinado tubulares (AT) previamente cortados al tamaño y axialmente alineados; la transferencia de dicho mandil de bobinado (A) con los núcleos de bobinado tubulares (AT) insertados sobre el mismo al interior de una máquina de rebobinar (1) para formar dichas bobinas (BB) de material en banda alrededor de dichos núcleos de bobinado tubulares (AT) .
2. Sistema según se reivindica en la reivindicación 1 en el que dicho robot (5) comprende un cabezal de manipulación (13) provisto de elementos de agarre para agarrar los mandriles de bobinado y con un elemento de expansión y contracción (51) para expandir/contraer los mandriles de bobinado, para causar la expansión de los mandriles (A) y el bloqueo sobre los mismos de los núcleos de bobinado tubulares (AT) y la contracción de los mandriles (A) y el desbloqueo de los núcleos de bobinado tubulares (AT) de dichos mandriles (A) , y en el que dichos elementos de agarre comprenden dos pares de mordazas (27A, 27B) alineadas para el acoplamiento de los mandriles de bobinado (A) en dos puntos longitudinalmente distantes.
3. Sistema según se reivindica en la reivindicación 2 en el que dicho elemento de expansión y contracción (51) es un elemento neumático.
4. Sistema según se reivindica en la reivindicación 2 o 3 en el que dicho elemento de expansión y contracción (51) para expandir/contraer los mandriles de bobinado (A) está adaptado para adoptar una posición de funcionamiento y una posición inactiva con respecto a dichos elementos de agarre (27A, 27B) .
5. Sistema según se reivindica en la reivindicación 2, 3 o 4 en el que dicho primer par de mordazas (27A) está 40 provisto de superficies para el acoplamiento de una espiga extrema de dichos mandriles de bobinado (A) .
6. Sistema según se reivindica en una o más de las reivindicaciones anteriores en el que un soporte (101) para los mandriles de bobinado (A) está asociado con dicho conjunto de inserción (9) y en el que dicho robot (5) está controlado para transferir los mandriles de bobinado (A) desde dicho soporte (101) al interior de los núcleos 45 tubulares (AT) a través de un movimiento axial.
7. Sistema según se reivindica en una o más de las reivindicaciones anteriores en el que dicho conjunto de corte (7) y dicho conjunto de inserción (9) están instalados un al lado del otro y conectados mediante una superficie de transferencia de los núcleos de bobinado tubulares (AT) .
8. Sistema según se reivindica en una o más de las reivindicaciones anteriores en el que dicho conjunto de corte (7) comprende: un bastidor para sostener los tubos (T) con un sistema para girar el tubo que se va a cortar; un elemento de corte (79) ; un alimentador para alimentar el tubo (T) que se va a cortar al elemento de corte (79) .
9. Sistema según se reivindica en la reivindicación 8 en el que dicho bastidor de soporte comprende un par de rodillos (69) con ejes sustancialmente paralelos, por lo menos uno de los cuales puede estar motorizado para llevar al giro dichos tubos (T) .
10. Sistema según se reivindica en la reivindicación 8 o 9 en el que dicho bastidor de soporte para sostener los 60 tubos (T) se extiende desde lados opuestos del elemento de corte (79) , en un lado estando colocados los tubos (T) que se van a cortar y en el otro estando recogidos los núcleos de bobinado tubulares (AT) obtenidos a partir del corte de los tubos individuales (T) , axialmente alineados unos con otros.
11. Sistema según se reivindica en la reivindicación 8, 9 o 10 en el que con dicho bastidor para sostener los tubos (T) están asociados una corredera de entrada y un distribuidor (65) que arrastra los tubos individuales (T) desde dicha corredera y los transfiere sobre dicho bastidor.
12. Sistema según se reivindica en una o más de las reivindicaciones 8 a 11 en el que un expulsor (95) , el cual expulsa los núcleos de bobinado tubulares (AT) , axialmente alineados unos con otros, hacia el conjunto de introducción, está asociado con dicho bastidor.
13. Sistema según se reivindica en una o más de las reivindicaciones 8 a 12 en el que dicho elemento de corte (79) 10 comprende una cuchilla de disco.
14. Sistema según se reivindica en una o más de las reivindicaciones 8 a 13 en el que un empujador (71) está asociado con dicho elemento de corte (79) , para sostener el tubo (T) en dicho bastidor contra el empuje impartido sobre el tubo (T) por dicho elemento de corte (79) .
15. Sistema según se reivindica en una o más de las reivindicaciones anteriores en el que dicho conjunto de inserción (9) comprende un elemento de sujeción (123) para sostener los núcleos de bobinado tubulares (AT) mutuamente alineados axialmente durante la inserción del mandril de bobinado (A) en su interior.
16. Sistema según se reivindica en una o más de las reivindicaciones anteriores en el que dicho conjunto de inserción (9) comprende un compactador (111) para apoyar axialmente unos contra otros los núcleos de bobinado tubulares (AT) en el interior de los cuales se tiene que insertar un mandril de bobinado (A) .
17. Sistema según se reivindica en la reivindicación 16 en el que dicho robot (5) está diseñado y controlado para transferir los mandriles de bobinado (A) , con los núcleos de bobinado tubulares (AT) insertados sobre los mismos, desde el conjunto de inserción (9) hasta dicha estación (11) para distanciar mutuamente axialmente los núcleos de bobinado tubulares.
18. Un procedimiento para la preparación de mandriles de bobinado (A) sobre los cuales están insertados y 30 bloqueados núcleos de bobinado tubulares (AT) , que comprende las etapas de:
-aproximar axialmente dichos núcleos de bobinado tubulares (AT) uno hacia otro;
-extracción de un mandril de bobinado (A) de bobinas previamente formadas (BB) de material en banda; 35
-inserción de dicho mandril (A) en el interior de un conjunto de núcleos de bobinado tubulares (AT) previamente cortados al tamaño y alineados axialmente;
-después de la inserción de dicho mandil de bobinado (A) en el interior de los núcleos de bobinado tubulares
(AT) , distanciar mutuamente dichos núcleos de bobinado (AT) antes de la inserción en el interior de la máquina de rebobinar (1) y la transferencia del mandril de bobinado (A) con los núcleos de bobinado tubulares (AT) insertados sobre el mismo dentro de una máquina de rebobinar (1) para formar bobinas (BB) de material en banda alrededor de dichos núcleos de bobinado tubulares (AT) ;
y en el que dicho mandril (A) es extraído de dichas bobinas (BB) e insertado en dichos núcleos de bobinado tubulares (AT) por medio del mismo robot de manipulación (5) .
19. Procedimiento según se reivindica en la reivindicación 18 en el que:
-dichos núcleos de bobinado tubulares (AT) están sujetados sobre dicho mandil (A) ;
-el mandril (A) con los núcleos de bobinado tubulares (AT) es transferido desde una posición de inserción en los núcleos de bobinado tubulares (AT) hasta una posición de distanciamiento mutuo axial de dichos núcleos de bobinado tubulares (AT) ;
-los núcleos de bobinado tubulares (AT) son desbloqueados de dicho mandil (A) , son separados axialmente unos de otros y bloqueados otra vez en el mandril (A) .
20. Procedimiento según se reivindica la reivindicación 19 en el que dicho robot manipulación (5) transfiere los 60 mandriles de bobinado (A) desde la posición de inserción hasta la posición de distanciamiento axial mutuo y en el que el mandril (A) es expandido y contraído para bloquear y desbloquear los núcleos de bobinado (AT) sobre dicho mandril (A) por medio de un elemento de expansión y contracción (51) transportado por dicho robot de manipulación (5) .
Patentes similares o relacionadas:
Dispositivo de extracción de lámina y un método para quitar una lámina de una banda de rodadura de neumático, del 29 de Abril de 2020, de VMI Holland B.V: Dispositivo de extracción de lámina para quitar una lámina de una banda de rodadura de neumático en una dirección de extracción (X), donde el dispositivo […]
Dispositivo y método para el enrollado de una pluralidad de rollos de bolsas precortadas en un único eje, del 5 de Junio de 2019, de Mobert S.r.l: Dispositivo para enrollar en un único eje (A) una pluralidad de rollos (R) de bolsas precortadas alimentadas en tiras o bandas (S) paralelas, en el que dicho […]
Dispositivo de corte, del 24 de Abril de 2019, de TSUDAKOMA KOGYO KABUSHIKI KAISHA: Un dispositivo de corte que comprende: un mecanismo de descarga que tiene una unidad de accionamiento de descarga en la cual se monta un rodillo de lámina […]
Máquina para la producción de bobinas con un sistema para la alineación de las cuchillas de corte longitudinales y la trayectoria de las tiras longitudinales generadas por corte con las cuchillas y método relevante, del 9 de Enero de 2019, de A. CELLI NONWOVENS S.P.A.: Una máquina para formar bobinas enrolladas de manera helicoidal (B), que comprende: - una sección de desenrollamiento de carretes primarios (Ba, Bb) de material […]
Dispositivo para el arrollamiento de material en forma de cinta sobre carretes, del 27 de Diciembre de 2018, de SUBA Holding GmbH + Co. KG: Dispositivo para el enrollado de material en forma de cinta sobre carretes (50, 50') con: al menos un primer cuerpo giratorio (10a, 10b) giratorio alrededor […]
Dispositivo de rodillo pisador para máquina cortadora de material laminar bobinado, del 26 de Abril de 2017, de COMEXI GROUP INDUSTRIES, S.A. SOCIEDAD UNIPERSONAL: Comprende una barra de soporte sobre Ia que está montado giratoriamente un rodillo pisador compuesto por un pluralidad de segmentos pisadores adyacentes, cada […]
Procedimiento y máquina para realizar bobinas de pequeños anchos de película de material plástico estirable, a partir de una bobina de ancho grande, del 25 de Enero de 2017, de GENNESSON, PATRICK: Procedimiento para realizar bobinas de anchos pequeños de película de material plástico estirable (F), a partir de una bobina de ancho grande de donde es desenrollada […]
Arrollador para arrollar restos de lámina, del 20 de Abril de 2016, de MULTIVAC SEPP HAGGENMULLER GMBH & CO. KG: Arrollador para arrollar restos de lámina para máquinas envasadoras , que comprende un accionamiento , un mandril de […]