Sistema y procedimiento de estimación indirecta de la resistencia de un rotor.
Sistema de estimación indirecta de la resistencia de un rotor para un motor de inducción de CA,
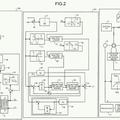
que comprende: un regulador de corriente de marco síncrono, sensible a órdenes de corriente directa y en cuadratura y a corrientes de devanado de motor de marco fijo detectadas, para proporcionar voltajes directos y en cuadratura y convertirlos en voltajes de marco fijo, ajustados para el ángulo de flujo del rotor, para accionar la etapa de potencia del motor;
un circuito de control para hacer que progrese sucesivamente dicha orden de cuadratura hacia cero y dicha orden de corriente directa hacia un valor predeterminado, haciendo que descienda el voltaje en cuadratura del estator como una representación del descenso de la corriente del rotor;
un dispositivo de almacenamiento para almacenar al menos una diferencia de tiempo/voltaje de descenso del voltaje del estator y una resistencia de rotor de referencia correspondiente; y
un circuito de medición, sensible a que el voltaje descendente del estator alcance unos umbrales espaciados, para definir una diferencia de voltaje/tiempo para recuperar de dicho dispositivo de almacenamiento la resistencia asociada del rotor.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2008/003443.
Solicitante: MOSAID Technologies Inc.
Nacionalidad solicitante: Canadá.
Dirección: 11 Hines Road, Suite 203 Ottawa, ON K2K 2X1 CANADA.
Inventor/es: ARNET,BEAT J.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H02P23/00 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › Disposiciones o métodos para el control de motores de corriente alterna que se caracterizan por un método de control que no sea control por vector.
PDF original: ES-2483740_T3.pdf
Fragmento de la descripción:
Sistema y procedimiento de estimación indirecta de la resistencia de un rotor.
Campo de la invención
Un sistema y un procedimiento mejorados de estimación indirecta de la resistencia de un rotor para un motor de inducción de CA.
Antecedentes de la invención
Las mejoras en electrónica de potencia y el advenimiento de procesadores de señal digital (DSP) han permitido el uso de motores de inducción baratos y robustos en aplicaciones que estaban reservadas hasta ahora a motores de CC de escobillas (tales como accionamientos de tracción y accionamientos industriales de velocidad variable). Aprovechándose de las nuevas tecnologías de control y el nuevo hardware disponible, los motores de inducción de CA pueden conseguir las mismas prestaciones dinámicas que un motor de CC, al tiempo que exhiben una densidad de potencia más alta, un menor coste y un mantenimiento cero.
Los dos procedimientos de control avanzados más extendidos para motores de inducción son "control orientado al campo" (FOC) y "control de par directo" (DTC)". El FOC se propuso en primer lugar hace más de treinta años (en 1971 por F. Blaschke), mientras que el DTC más "moderno" emergió una década después. La ventaja del DTC es su simplicidad, no requiriendo ningún regulador de corriente y siendo muy robusto a variaciones de parámetros. Sin embargo, el DTC presenta también algunos inconvenientes en comparación con el FOC, tal como alta ondulación de la corriente, dificultad para controlar el par y el flujo a bajas velocidades, alto ruido acústico a baja velocidad y falta de control directo de la corriente. Estas cuestiones son la razón por la cual el FOC es todavía ampliamente utilizado para tracción eléctrica, en donde las prestaciones a baja velocidad y el control de corriente preciso son características muy importantes.
En el FOC, las tres formas de onda de corriente trifásica y las formas de onda de voltaje se transforman en un marco dq de dos ejes (marco síncrono) que está girando a la frecuencia de las formas de onda eléctricas. Debido a esta transformación coordinada, las formas de onda de CA dan como resultado vectores CC (también denominados vectores espaciales). La ventaja de este enfoque es que es mucho más fácil controlar cantidades de CC que cantidades de CA. Por tanto, la implementación de un regulador de corriente digital es relativamente directa y puede ser muy robusta y dinámica.
Si el marco síncrono se alinea con el flujo de rotor (MJr), entonces la componente de corriente alineada con el flujo (corriente directa, Id) puede utilizarse para controlar el flujo de la máquina, mientras que la corriente en cuadratura (lq) controla la magnitud del par del motor. Este desacoplamiento de par y flujo permite prestaciones de velocidad variable dinámicas que compite con un motor de CC, si no lo supera.
A fin de alinear el marco d-q con el flujo de rotor (giratorio), la posición instantánea del flujo de rotor (r) con respecto a las fases de devanado de motor U, V, W necesita ser conocida, y en ello reside la dificultad del procedimiento FOC. Puesto que no es práctico medir directamente la posición del flujo del rotor, ésta tiene que estimarse indirectamente, y de aquí que el procedimiento se denomine frecuentemente control indirecto orientado al campo.
La técnica para estimar la posición (r) del flujo del rotor se basa en integrar la frecuencia eléctrica (eos), que puede calcularse a partir de la frecuencia rotacional del rotor (co) y la frecuencia de deslizamiento (cor):
r = jú)sdt <os o) + o)r ©=Pp-Q (1)
Pp representa el número de pares de polos del motor, Q es la velocidad mecánica.
9r = Pp^Cldt + Jct/r dt
(2)
Puesto que puede medirse la integral de la velocidad mecánica (por medio de un codificador de posición), el problema se reduce a la integración de la frecuencia de deslizamiento (estimada) cor. Muy frecuentemente cor se determina sobre la base de la siguiente ecuación:
Cúr = Iq (3)
Rr representa la resistencia del rotor.
La dificultad con la expresión anterior para el deslizamiento es el hecho de que éste depende de la resistencia del rotor, que cambia con la temperatura del rotor. En el uso típico de un motor de inducción, la temperatura del rotor experimenta una oscilación de temperatura grande y la resistencia del rotor variará en consecuencia. Si el deslizamiento no se estima correctamente, el marco síncrono (dq) ya no está alineado con el flujo del rotor y el FOC llega a "desintonizarse", degradando así las prestaciones del motor.
Breve sumario de la invención
Por tanto, es un objetivo de esta invención proporcionar un sistema y un procedimiento mejorados de estimación indirecta de la resistencia de un rotor para un motor de inducción de CA.
Es un objetivo adicional de esta invención proporcionar un sistema y un procedimiento mejorados de estimación indirecta de la resistencia de un rotor de este tipo que no requieran ningún sensor especializado tales como sensores de par o de voltaje.
Es un objetivo adicional de esta invención proporcionar un sistema y un procedimiento mejorados de estimación indirecta de la resistencia de un rotor de este tipo que sean compatibles con patrones de conmutación inversores regulares y hardware inversor estándar.
Es un objetivo adicional de esta invención proporcionar un sistema y un procedimiento mejorados de estimación indirecta de la resistencia de un rotor de este tipo que sean aplicables cuando el motor esté girando y durante cambios de velocidad.
Es un objetivo adicional de esta invención proporcionar un sistema y un procedimiento mejorados de estimación indirecta de la resistencia de un rotor de este tipo que se liguen directamente al marco de un FOC, requiriendo únicamente un mínimo software adicional.
Es un objetivo adicional de esta invención proporcionar un sistema y un procedimiento mejorados de estimación indirecta de la resistencia de un rotor de este tipo que no dependan de un modelo de motor complejo o un conocimiento preciso de otros parámetros del motor.
La invención resulta de la constatación de que un sistema y un procedimiento de estimación indirecta de la resistencia de un rotor verdaderamente mejorados, simples y todavía altamente efectivos para un motor de inducción de CA pueden efectuarse con la utilización del regulador de corriente de marco síncrono convencional ordenando primero a la corriente en cuadratura y luego a la corriente directa o de magnetización que se ajusten sustancialmente a cero, haciendo que la corriente de estator se haga cero, mientras que, en cambio, la corriente inducida fluye en el rotor; el voltaje del estator al tratar de mantener la corriente del estator a cero desciende correspondientemente al descenso de la corriente inducida del rotor. En cualquier momento seleccionado a lo largo del voltaje descendente del estator puede medirse un incremento de tiempo o voltaje para definir un incremento de voltaje o de tiempo que puede aplicarse a una tabla almacenada de resistencias de rotor correspondientes que corresponden al incremento de voltaje o de tiempo.
Sin embargo, en otras formas de realización la presente invención no necesita conseguir todos estos objetivos y las reivindicaciones de la misma no deberán limitarse a estructuras o procedimientos capaces de lograr estos objetivos.
La invención ofrece un sistema de estimación indirecta de la resistencia de un rotor para un motor de inducción de CA que incluye un regulador de corriente de marco síncrono, sensible a órdenes de corriente directa y en cuadratura y a corrientes de devanado de motor de marco fijo percibidas, para proporcionar voltajes directos y en cuadratura y convertirlo en voltajes de marco fijo, ajustadas para el ángulo de flujo del rotor, a fin de accionar la etapa de potencia del motor; y un circuito de control para hacer que progrese sucesivamente la orden de cuadratura hacia cero y la orden de corriente directa hacia un valor predeterminado, haciendo que el voltaje en cuadratura del estator descienda como una representación del descenso de la corriente del rotor. Hay un dispositivo de almacenamiento para almacenar al menos una diferencia de tiempo/voltaje de descenso del voltaje del estator y una resistencia de rotor de referencia correspondiente; y un circuito de medición, sensible al voltaje descendente del estator que alcanza umbrales espaciados, define una diferencia de voltaje/tiempo para recuperar del dispositivo de almacenamiento la resistencia asociada del rotor.
En una forma de realización preferida se incluye además un circuito de normalización para normalizar el descenso del voltaje en cuadratura del estator con respecto a la velocidad del motor. Puede... [Seguir leyendo]
Reivindicaciones:
1. Sistema de estimación indirecta de la resistencia de un rotor para un motor de inducción de CA, que comprende:
un regulador de corriente de marco síncrono, sensible a órdenes de corriente directa y en cuadratura y a corrientes de devanado de motor de marco fijo detectadas, para proporcionar voltajes directos y en cuadratura y convertirlos en voltajes de marco fijo, ajustados para el ángulo de flujo del rotor, para accionar la etapa de potencia del motor;
un circuito de control para hacer que progrese sucesivamente dicha orden de cuadratura hacia cero y dicha orden de corriente directa hacia un valor predeterminado, haciendo que descienda el voltaje en cuadratura del estator como una representación del descenso de la corriente del rotor;
un dispositivo de almacenamiento para almacenar al menos una diferencia de tiempo/voltaje de descenso del voltaje del estator y una resistencia de rotor de referencia correspondiente; y
un circuito de medición, sensible a que el voltaje descendente del estator alcance unos umbrales espaciados, para definir una diferencia de voltaje/tiempo para recuperar de dicho dispositivo de almacenamiento la resistencia asociada del rotor.
2. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, que incluye además un circuito de normalización para normalizar el descenso del voltaje en cuadratura del estator con respecto a la velocidad del motor.
3. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, que incluye además un circuito lógico para calcular una frecuencia de deslizamiento (cür) a partir de dicha resistencia recuperada del rotor, para calcular la frecuencia eléctrica (cjs) a partir de dicha frecuencia de deslizamiento (cür), y para calcular la posición estimada (r) del rotor a partir de dicha frecuencia eléctrica (oos).
4. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que dicho circuito lógico calcula además la temperatura estimada del rotor a partir de la resistencia estimada del rotor y la utiliza para proteger el motor contra sobrecalentamiento.
5. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que dicho dispositivo de almacenamiento almacena las diferencias de tiempo y resistencias de rotor de referencia correspondientes, y dichos umbrales espaciados son niveles de voltaje.
6. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que dicho dispositivo de almacenamiento almacena las diferencias de voltaje y resistencias de rotor de referencia correspondientes, y dichos umbrales espaciados son tiempos.
7. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que dicho valor predeterminado es sustancialmente cero.
8. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que dicho dispositivo de almacenamiento incluye una tabla de búsqueda que tiene una pluralidad de diferencias de tiempo/voltaje y de resistencias de rotor de referencia correspondientes.
9. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que dicho dispositivo de almacenamiento incluye un conjunto de tablas de búsqueda, una para cada uno de entre una pluralidad de rangos de velocidad del motor.
1. Sistema de estimación indirecta de la resistencia de un rotor para un motor de inducción de CA que emplea un regulador de corriente de marco síncrono, sensible a órdenes de corriente directa y en cuadratura y a corrientes de devanado de motor de marco fijo detectadas, para proporcionar voltajes directos y en cuadratura y convertirlos en voltajes de marco fijo, ajustados para el ángulo de flujo del rotor, para accionar la etapa de potencia del motor, incluyendo dicho sistema un procesador configurado para:
hacer progresar sucesivamente la orden de cuadratura hacia cero y dicha orden de corriente directa hacia un valor predeterminado, haciendo que descienda el voltaje en cuadratura del estator como una representación del descenso de la corriente del rotor;
almacenar al menos una diferencia de tiempo/voltaje de descenso del voltaje de estator y una resistencia de rotor de referencia correspondiente; y
definir, en respuesta a que el voltaje descendente del estator alcance unos umbrales espaciados, una diferencia
de voltaje/tiempo para recuperar de dicho dispositivo de almacenamiento la resistencia asociada del rotor.
11. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que dicho
procesador está configurado además para normalizar el descenso del voltaje en cuadratura del estator con respecto
a la velocidad del motor.
12. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que dicho
procesador está configurado además para calcular una frecuencia de deslizamiento (cor) a partir de la resistencia
recuperada del rotor; para calcular la frecuencia eléctrica (cos) a partir de la frecuencia de deslizamiento (cür) y para estimar la posición (r) del rotor a partir de una frecuencia eléctrica (cos).
13. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que se almacenan las diferencias de tiempo con las resistencias de rotor de referencia correspondientes y los umbrales espaciados son voltajes.
14. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que se almacenan las diferencias de voltaje con resistencias de rotor de referencia correspondientes y los umbrales espaciados son tiempos.
15. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que dicho valor predeterminado es sustancialmente cero.
16. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que dicho procesador está configurado para almacenar una tabla de búsqueda que tiene una pluralidad de diferencias de tiempo/voltaje y de resistencias de rotor de referencia correspondientes.
17. Sistema de estimación indirecta de la resistencia de un rotor según la reivindicación 1, en el que dicho procesador está configurado para almacenar un conjunto de tablas de búsqueda, una para cada uno de entre una pluralidad de rangos de velocidad del motor.
Patentes similares o relacionadas:
Método para controlar un inversor, del 6 de Mayo de 2020, de LSIS Co., Ltd: Un método para controlar un inversor que realiza una optimización de salida de un motor en una sección por encima de la velocidad […]
Accionadores de válvula, del 26 de Febrero de 2020, de Eaton Intelligent Power Limited: Un accionador de válvula que incluye: un vástago de impulsión para, en uso, ajustar una válvula entre una posición de apertura y una posición de cierre; […]
Procedimiento y dispositivo de regulación y/o control para el funcionamiento de una instalación de energía eólica y/o de un parque, así como instalación de energía eólica y parque eólico, del 16 de Octubre de 2019, de Wobben Properties GmbH: Procedimiento para el funcionamiento de una instalación de energía eólica y/o de un parque eólico para la inyección de potencia eléctrica a una red de alimentación […]
 Dispositivo de generación hidroeléctrica de almacenamiento por bombeo de velocidad variable, del 26 de Junio de 2019, de Hitachi Mitsubishi Hydro Corporation: Un aparato de generación de potencia de almacenamiento por bombeo de velocidad variable que comprende un motor de generador de velocidad variable que […]
Dispositivo de generación hidroeléctrica de almacenamiento por bombeo de velocidad variable, del 26 de Junio de 2019, de Hitachi Mitsubishi Hydro Corporation: Un aparato de generación de potencia de almacenamiento por bombeo de velocidad variable que comprende un motor de generador de velocidad variable que […]
Procedimiento de identificación de la resistencia eléctrica del rotor de un motor eléctrico, del 12 de Junio de 2019, de SCHNEIDER TOSHIBA INVERTER EUROPE SAS: Procedimiento de identificación de un valor (Rr) de resistencia de un rotor de motor (M) eléctrico de inducción, caracterizado porque comprende las etapas […]
Sistema de control de motor eléctrico de inducción, del 8 de Mayo de 2019, de LSIS Co., Ltd: Un sistema para controlar un motor electrico de induccion en una region de alta velocidad por encima de una velocidad nominal predeterminada, […]
Método para detectar el estado de un cable de alimentación en un sistema inversor, del 3 de Abril de 2019, de LSIS Co., Ltd: Un metodo para detectar los estados de los cables de alimentacion en un sistema inversor que suministra energia generada a partir de un inversor a […]
Aparato para controlar un motor de inducción, del 27 de Febrero de 2019, de LSIS Co., Ltd: Un aparato para controlar una máquina de inducción en un sistema que incluye una primera unidad de determinación configurada para determinar una tensión […]