Sistema y procedimiento para determinar la preferencia de paso en cruces para vehículos.
Procedimiento para determinar la preferencia de paso para una pluralidad de unidades móviles (21) en un cruce,
comprendiendo el procedimiento:
recoger información de posición y movimiento (13) sobre la pluralidad de unidades móviles (21) que seaproximan al cruce;
almacenar una pluralidad de reglas sobre la preferencia de paso en el cruce;
acceder a información (16) acerca de la geometría del cruce;
calcular cuál de una o más de la pluralidad de unidades móviles (21) tiene preferencia de paso paraentrar en el cruce, en respuesta a la información de posición y movimiento (13), las reglasalmacenadas y la información (16) acerca de la geometría del cruce, caracterizado por el hecho de:detectar si una señal de tráfico (22) en el cruce es funcional; y
transmitir de manera inalámbrica señales de indicación de preferencia de paso (14) a una o más de lapluralidad de unidades móviles (21) cuando se detecta que la señal de tráfico (22) no funciona.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2008/081465.
Solicitante: KAPSCH TRAFFICCOM AG.
Nacionalidad solicitante: Austria.
Dirección: Am Europlatz 2 1120 Wien AUSTRIA.
Inventor/es: MCNEW,JUSTIN PAUL, MORING,JOHN THOMAS, DESSOUKY,KHALED I.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C23/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Instrumentos combinados que indican más de un valor de navegación, p. ej. para aeronaves; Dispositivos de medida combinados para la medida de dos o más variables de movimiento, p. ej. distancia, velocidad, aceleración.
PDF original: ES-2424238_T3.pdf
Fragmento de la descripción:
En alguna realización, la presente invención es un procedimiento y un sistema para determinar la preferencia de paso para una pluralidad de unidades móviles en un cruce. El procedimiento y el sistema incluyen recoger información de posición y movimiento alrededor de la pluralidad de unidades móviles que se aproximan al cruce; almacenar una pluralidad de reglas sobre la preferencia de paso en el cruce; acceder a información sobre una representación geométrica y/o en un mapa del cruce; calcular cuál de una o más de la pluralidad de unidades móviles tiene preferencia para entrar en el cruce, que responda a la información de posición y movimiento, las reglas almacenadas y la información de representación geométrica y/o en un mapa, y transmitir de manera inalámbrica señales de indicación de preferencia de paso a una o más de la pluralidad de unidades móviles. El objetivo de la invención es un procedimiento y un dispositivo según las reivindicaciones 1 a 14.
Breve descripción de los dibujos La figura 1 muestra una configuración de ejemplo de una unidad fija (en la carretera) , de acuerdo con algunas realizaciones de la presente invención.
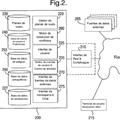
La figura 2 ilustra un sistema para determinar la preferencia de paso en un cruce de tráfico de acuerdo con algunas realizaciones de la presente invención.
La figura 3 ilustra un flujo de procesamiento del ejemplo asociado a la determinación de la preferencia de paso de acuerdo con algunas realizaciones de la presente invención.
Descripción detallada En alguna realización, la presente invención incluye una unidad de comunicaciones y procesamiento fija situada cerca de un cruce de tráfico, siendo el cruce incontrolado o bien con una señal de tráfico que no se encuentra operativa. La unidad fija tiene acceso a una representación en un mapa y/o geométrica (por ejemplo, en un formato de un sistema de información geográfica (GIS) ) del cruce, y a reglas de preferencia de paso y de seguridad relacionadas con el cruce. La unidad estacionaria recoge información sobre la posición y el movimiento en tiempo real de uno o más vehículos que se aproximan al cruce, así como del estado de la señal de tráfico, si existe. Utilizando esta información, y teniendo en cuenta normas de seguridad y la información de respuesta de mapa, la unidad fija determina qué vehículo (s) tiene (n) preferencia de paso en el cruce y entonces comunica esta información a los vehículos.
La figura 1 muestra un ejemplo de configuración de una unidad en la carretera, de acuerdo con algunas realizaciones de la presente invención. Una unidad fija, por ejemplo, una unidad de la carretera 10, puede posicionarse cerca de un cruce y puede incluir medios de comunicación inalámbrica, tal como por ejemplo un transceptor 12, que permita conectividad con los vehículos que se aproximan a un cruce. Una unidad de procesamiento 11 calcula y genera información de indicaciones preferencia de paso 14. Aunque se muestra local en la unidad de la carretera, la unidad de procesamiento puede encontrarse a distancia de la unidad de la carretera. La unidad de la carretera 10 también incluye conocimiento sobre el cruce y la geometría circundante, por ejemplo, a través de información almacenada detallada de mapas 16 almacenada en una base de datos (medios de almacenamiento) . Este conocimiento de la información del cruce puede almacenarse de manera remota y comunicarse a la unidad de la carretera bajo petición.
La figura 2 ilustra un sistema (entorno) para determinar la preferencia de paso en un cruce de tráfico, de acuerdo con algunas realizaciones de la presente invención. Unos vehículos 21 incluyen capacidad de comunicaciones inalámbricas que permiten la conectividad con una o más unidades de la carretera. Los vehículos 21 también pueden incluir una interfaz de operario con capacidad para indicar la preferencia de paso (o falta de ésta) , por ejemplo, por pantalla, indicación activada por voz, y/o sensores, servos y actuadores para controlar automáticamente los movimientos de los vehículos, por ejemplo, en el caso de vehículos no tripulados. Los vehículos 21 también pueden incluir capacidad de determinación de la posición, donde se determina información móvil precisa y oportuna 13 y se comunica a la unidad de la carretera, lo que permite a la unidad de la carretera seguir y predecir trayectorias de vehículos. La capacidad de posicionamiento se utiliza para determinar las posiciones de los vehículos 21, que puede ser a bordo de los vehículos, por ejemplo, vía satélite, tal como GPS, GPS diferencial, una combinación de GPS y futuros sistemas de satélite, o puede ser utilizando sensores integrados 23 en la unidad de la carretera, y/o alrededor del cruce, o pueden utilizarse combinaciones de estos procedimientos de posicionamiento para producir un posicionamiento preciso a nivel de carril y sub-carril. Las unidades de navegación existentes en el vehículo pueden utilizarse para algunas de estas funciones.
Adicionalmente, el sistema puede incluir un medio de comunicaciones fuera de banda (por ejemplo, por cable) 24, que permita a la unidad de la carretera 10 recibir información tal como el estado de funcionamiento a partir de una señal de tráfico local 22, estado del tráfico de los sensores locales 23, actualizaciones de bases de datos y configuración 17 desde una fuente remota, y el conocimiento del cruce si tal información se encuentra almacenada a distancia de la unidad de la carretera.
Utilizando el conocimiento del cruce y el lugar circundante, la unidad de procesamiento 11 evalúa el movimiento del vehículo (unidad móvil) en el contexto del cruce y el entorno local. La información del movimiento del vehículo incluye por lo menos la posición del vehículo. A partir de una serie de actualizaciones de la posición puede calcularse, la dirección, la velocidad, y la aceleración del vehículo a bordo del vehículo y comunicarlo a la unidad de la carretera, o calcularlo en el procesador asociado a la unidad de la carretera. Puede incluirse información adicional que se refiera al movimiento del vehículo. Esta información adicional puede incluir información en tiempo real, tal como estado de frenado o giro del vehículo. La información adicional también puede incluir parámetros del vehículo que afecten al movimiento o la prioridad del vehículo, como el peso y el tamaño, o el estado del vehículo (por ejemplo, vehículo de emergencia) . La información local puede incluir la ruta de carreteras de entrada al cruce, límites de velocidad que prevalecen en esas rutas, la posición de carriles exclusivamente para giro, el tamaño y la orientación del propio cruce, etc. En algunas realizaciones, la información local (o parte de la misma) se recibe de una fuente central. La información local puede introducirse en la unidad de la carretera directamente o por medio de mensajes recibidos a través de una conexión de red. La evaluación en el procesador incluye estos cálculos como predicción acerca de cuándo llegará el vehículo al cruce, el camino que cogerá, y cuándo saldrá del cruce.
La información en tiempo real puede incluir la posición/rumbo/velocidad del tráfico que se aproxima, la aceleración del vehículo y las capacidades de vehículo, tales como la capacidad de aceptar y procesar mensajes de preferencia de paso. Esta información vehicular puede recibirse a través de informes o mensajes desde los propios vehículos, así como desde sensores (por ejemplo, cámaras, radares, tiras magnéticas incorporadas en la carretera, etc.) situados cerca del cruce. La información en tiempo real también puede incluir condiciones predominantes que afecten al tráfico, tales como el tiempo, el estado y la visibilidad de la carretera, cortes de carriles, obras, etc. Esta información puede ser recibida por la unidad fija desde una fuente central, y/o desde una fuente local (por ejemplo, personal de trabajo de carretera, y/o diversos sensores locales) . En algunas realizaciones, a las condiciones predominantes que afectan al tráfico y la carretera se les da diferente importancia. Por ejemplo, si una carretera está cerrada no importa si no se permite pasar a ningún vehículo, si la carretera está mojada, se aumenta la importancia de la velocidad de los vehículos, o si hay poca visibilidad, se incrementa la importancia de la distancia al cruce.
Los medios de comunicación inalámbricos (por ejemplo, 12 en la figura 1) pueden ser cualquier comunicación que permita transferir información de baja latencia entre vehículos y la unidad estacionaria. Una tecnología especialmente adecuada para este fin se conoce alternativamente como acceso inalámbrico en entornos vehiculares (WAVE) o comunicaciones dedicadas de corto alcance (DSRC) . Los vehículos podrían generar automáticamente... [Seguir leyendo]
Reivindicaciones:
En resumen, aunque determinadas realizaciones de ejemplo se han descrito anteriormente en detalle y se muestran en los dibujos que se acompañan, hay que entender que dichas realizaciones son meramente ilustrativas y no restrictivas de la invención general. En particular, debe reconocerse que las enseñanzas de la invención se aplican a una amplia variedad de sistemas y procesos. Por tanto, se reconoce que pueden introducirse varias modificaciones a las realizaciones ilustradas y a otras de la invención descrita anteriormente, sin apartarse del amplio alcance inventivo de la misma. En vista de lo anterior, se entenderá que la invención no se limita a las realizaciones o disposiciones particulares descritas, sino que más bien pretende cubrir cualquier cambio, adaptación o modificación que se encuentre dentro del alcance y el espíritu de la invención tal como se describe aquí.
1. Procedimiento para determinar la preferencia de paso para una pluralidad de unidades móviles (21) en un cruce, comprendiendo el procedimiento:
recoger información de posición y movimiento (13) sobre la pluralidad de unidades móviles (21) que se aproximan al cruce; almacenar una pluralidad de reglas sobre la preferencia de paso en el cruce; acceder a información (16) acerca de la geometría del cruce; calcular cuál de una o más de la pluralidad de unidades móviles (21) tiene preferencia de paso para entrar en el cruce, en respuesta a la información de posición y movimiento (13) , las reglas almacenadas y la información (16) acerca de la geometría del cruce, caracterizado por el hecho de: detectar si una señal de tráfico (22) en el cruce es funcional; y transmitir de manera inalámbrica señales de indicación de preferencia de paso (14) a una o más de la pluralidad de unidades móviles (21) cuando se detecta que la señal de tráfico (22) no funciona.
2. Procedimiento según la reivindicación 1, caracterizado por el hecho de que la información de posición y movimiento (13) se recoge en un enlace de comunicaciones de radio (12) .
3. Procedimiento según la reivindicación 1, caracterizado por el hecho de que por lo menos una parte de la información de posición y movimiento (13) se recoge de sensores fijos (23) .
4. Procedimiento según la reivindicación 1, caracterizado por el hecho de que por lo menos una parte de la información de posición y movimiento (13) se deriva de un Sistema de Posicionamiento Mundial.
5. Procedimiento según la reivindicación 1, caracterizado por el hecho de que la información de posición y movimiento (13) incluye, además, uno o más de dirección, estado de frenado, estado de aceleración, y estado de giro.
6. Procedimiento según reivindicación 5, caracterizado por el hecho de que la información de giro incluye la presencia de una unidad móvil (21) en un carril exclusivamente para giro.
7. Procedimiento según la reivindicación 5, caracterizado por el hecho de que la información de giro incluye una indicación de una dirección de movimiento de unidades móviles.
8. Procedimiento según la reivindicación 1, caracterizado por el hecho de que comprende, además, asignar la preferencia de paso a una unidad móvil (21) que carece de capacidad de recibir y procesar señales de indicación de preferencia de paso (14) .
9. Sistema para determinar la preferencia de paso para una pluralidad de unidades móviles (21) en un cruce que comprende:
una unidad fija (10) adaptada para recoger información de posición y movimiento (13) sobre la pluralidad de unidades móviles (21) que se aproximan al cruce; medios de almacenamiento adaptados para almacenar información (16) acerca de la geometría del cruce y una pluralidad de reglas sobre la preferencia de paso en el cruce; una unidad de procesamiento (11) adaptada para calcular cuál de una o más de la pluralidad de unidades móviles (21) tiene preferencia de paso para entrar en el cruce, en base a la información almacenada (16) y la información de posición y movimiento (13) ; y una unidad de comunicación (12) adaptada para transmitir de manera inalámbrica señales de indicación de preferencia de paso (14) a una o más de la pluralidad de unidades móviles (21) ; caracterizado por el hecho de que la unidad fija (10) está adaptada para detectar si una señal de tráfico (22) en el cruce es funcional; y por el hecho de que la unidad de procesamiento (11) está configurada para iniciar dicho cálculo y transmisión cuando se detecta que la señal de tráfico (22) no funciona.
10. Sistema según la reivindicación 9, caracterizado por el hecho de que comprende, además, una pantalla en las unidades móviles (21) adaptada para proporcionar una indicación visual o una indicación audible de la señal de indicación de preferencia de paso recibida (14) .
11. Sistema según la reivindicación 9, caracterizado por el hecho de que comprende, además, controles vehiculares adaptados para impedir que una unidad móvil (21) entre en el cruce.
12. Sistema según la reivindicación 9, caracterizado por el hecho de que comprende, además, un medio de almacenamiento para almacenar información acerca del estado de la carretera y el tiempo, y en el que la unidad de procesamiento (11) está adaptada para calcular cuál de la una o más de la pluralidad de las unidades móviles (21) tiene preferencia de paso utilizando la información acerca del estado de la carretera y el tiempo.
13. Sistema según la reivindicación 9, caracterizado por el hecho de que comprende, además, una pluralidad de sensores fijos (23) adaptados para generar por lo menos una parte de la información de posición y movimiento (13) .
14. Sistema según la reivindicación 9, caracterizado por el hecho de que la información (16) acerca de la geometría del cruce incluye una representación en un mapa del cruce.
Esta lista de referencias citadas por el solicitante es únicamente para la comodidad del lector. No forma parte del documento de la patente europea. A pesar del cuidado tenido en la recopilación de las referencias, no se pueden excluir errores u omisiones y la EPO niega toda responsabilidad en este sentido.
Documentos de patentes citados en la descripción • US 6405132 B • US 20050104745 A 10 • US 6281808 B
Patentes similares o relacionadas:
 Métodos y sistemas de programación de vuelo, del 29 de Julio de 2020, de BAE SYSTEMS PLC: Método, ejecutado por ordenador, de funcionamiento de un sistema electrónico de programación de vuelo para aeronave, en el que el sistema electrónico de programación […]
Métodos y sistemas de programación de vuelo, del 29 de Julio de 2020, de BAE SYSTEMS PLC: Método, ejecutado por ordenador, de funcionamiento de un sistema electrónico de programación de vuelo para aeronave, en el que el sistema electrónico de programación […]
Panel de mandos configurable para cabina de pilotos de aeronave y procedimiento de configuración de tal panel, del 15 de Abril de 2020, de Zodiac Aero Electric: Panel de mandos configurable para cabina de pilotos de aeronave, que incluye un conjunto de módulos de mando genéricos que comprenden cada uno de ellos […]
Un sistema de navegación aérea de operación autónoma, del 25 de Marzo de 2020, de DEUTSCHE TELEKOM AG: Un sistema de navegación aérea de operación autónoma comprendiendo como módulos al menos un servidor de navegación , al menos un agente de navegación […]
Integración de sistemas, del 8 de Enero de 2020, de BAE SYSTEMS PLC: Un método para generar, en una aeronave en vuelo , una visualización indicativa de la factibilidad de que un arma portada en la aeronave acometa con éxito […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Navegación vehicular basada en datos de calidad de sensor específicos del sitio, del 23 de Octubre de 2019, de DEERE & COMPANY: Un método para determinar la localización de un vehículo, el método que comprende: determinar los datos de localización de recepción dentro de una celda de un área […]
Aparato y método de aterrizaje de una aeronave de palas giratorias, del 10 de Abril de 2019, de BAE SYSTEMS PLC: Un método para ayudar a un piloto al aterrizaje de una aeronave de palas giratorias en condiciones de visibilidad reducida, donde el método […]
Dispositivo para la representación de un terreno sobre un dispositivo de visualización de un cuerpo volador, del 27 de Marzo de 2019, de HENSOLDT Sensors GmbH: Dispositivo para la representación de un terreno sobre un dispositivo de visualización de un avión, conteniendo un sistema sintético de visión con un banco […]