SISTEMA Y PROCEDIMIENTO DE CAPTURA Y PROCESADO DE IMÁGENES TRIDIMENSIONALES CON MOVIMIENTO.
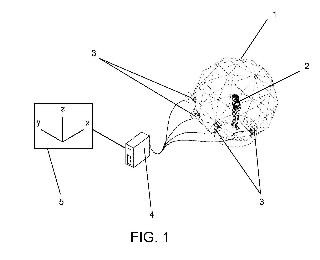
Sistema de captura y procesado de imágenes tridimensionales con movimiento que comprende una estancia (1) esférica,
donde el objeto (2) a grabar se posiciona en el centro, un sistema de iluminación, un sistema de adquisición con una pluralidad de cámaras (3) alrededor del objeto (2), un módulo de procesamiento (4), y un sistema representación tridimensional (5), que calcula las rectas convergentes al objetivo de cada cámara (3) y pone en común la información de cada cámara (3), definiendo cada par de rectas que interseccionan un punto en el espacio tridimensional.
Procedimiento de captura y procesado de imágenes tridimensionales con movimiento que captura la imagen inicial a través de una pluralidad de cámaras (3), envía la imagen captada a un módulo de procesamiento (4) y donde un sistema de representación tridimensional (5) muestra la imagen a través de la información captada por cada cámara (3) en un mismo instante.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201130834.
Solicitante: UNIVERSIDAD EUROPEA MIGUEL DE CERVANTES.
Nacionalidad solicitante: España.
Inventor/es: LOPEZ IGLESIAS,Matías.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
Fragmento de la descripción:
Sistema y procedimiento de captura y procesado de imágenes tridimensionales con movimiento.
Objeto de la invención El objeto de la presente invención trata de un sistema y procedimiento de captura y procesado de imágenes tridimensionales con movimiento, que captura las imágenes bidimensionales a través de una pluralidad de cámaras dispuestas alrededor del objeto, y mediante la intersección de las proyecciones de dicho objeto las transforma en una representación tridimensional para su posterior edición de texturas, animación y postproducción.
Antecedentes de la invención Las cámaras o sistemas de captura y visualización actuales utilizan lo que se conoce como luz estructurada. Por lo general, están basados en la introducción de información geométrica en la técnica de iluminación a fin de facilitar la extracción de la profundidad de la escena de análisis. Una de estas técnicas consiste en la proyección de una línea sencilla de luz sobre la escena y la imagen bidimensional es adquirida por medio de una cámara digitalizadora que se encuentra en un ángulo de toma adecuado.
Consiste en proyectar sobre el objeto o pieza unos patrones de luz conocidos modulados y observando la luz reflejada, que también viene modulada, obtener información sobre la estructurada de la superficie del objeto, la cual puede ser reconstruida mediante triangulación. Las fuentes de luz empleadas deben ser especiales pues deben ser capaces de emitir luz estructurada y suelen ser láseres.
La información de profundidad se adquiere del desplazamiento relativo de los diferentes puntos de la línea de luz. Este método necesita procesar múltiples imágenes para reconstruir la escena completa, ya sea moviendo la fuente de luz o dejando el sistema de iluminación fijo y recorrer la escena. Además, no permiten capturar la imagen desde distintos puntos de vista sin necesidad de una luz externa.
Se conoce el documento ES 2306089 T3, que describe un sistema foto-óptico electrónico capaz de reconocer el contorno externo de cualquier tipo de objeto y transformarlo en un conjunto de coordenadas cartesianas; y de transmitir la información matemática de la geometría de estos objetos, a través de redes, a un ordenador personal (para realizar una representación gráfica tridimensional del objeto y hacer posible a posteriori el procesamiento de la geometría del mismo por medio de programas de diseño asistido por ordenador en tres dimensiones, CAD 3D) y directamente a un dispositivo en línea, del tipo reproductor de fax, para reproducir en plástico, material compuesto o similar al papel que tengan el mismo volumen que el objeto reconocido, todo de manera automática y siguiendo una lógica predeterminada.
Descripción de la invención El sistema que se propone trata de parametrizar las coordenadas de los puntos en función de la intersección de las líneas generadas por las proyecciones de las capturas de las cámaras. Esto es, que cada uno de los píxeles que captura cada cámara se representa como una recta que al intersectar con la recta calculada por otra u otras cámaras situadas con distinto ángulo de ataque entorno al objeto capturado determina un voxel tridimensional.
Este sistema de triangulación no usa luz estructurada, con la ventaja que puede capturarse desde distintos puntos de vista sin necesidad de una luz tipo láser. También permite capturar consecutivamente la imagen de manera que se pueda sintetizar el movimiento secuencial.
El sistema que se propone es un sistema de grabación de objetos en un espacio tridimensional secuencial en el tiempo, por el cual se genera una sucesión de imágenes tridimensionales de un objeto situado en el centro de distintas cámaras que le capturan o graban tomando imágenes bidimensionales.
Para ello se requiere de una estancia en la una pluralidad de cámaras se distribuyen alrededor de un objeto. Preferentemente estas cámaras se distribuirán homogéneamente, pero no es imprescindible. Cuanto mayor sea el número de cámaras y de mayor resolución, mejor será el resultado. En principio tan sólo es necesario referenciar la posición exacta en el espacio de cada cámara. La estancia ha de estar bien iluminada, preferiblemente con luz difusa y disponer de un sistema homogéneo para la eliminación de fondo.
Así, en el interior de la estancia de forma esférica se distribuyen una pluralidad de cámaras, preferentemente de forma equidistante. Para lograr el objeto 3d manipulable, el proceso comprende las siguientes etapas:
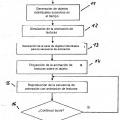
-Grabación: Captura inicial del objeto y sus movimientos
-Modelado: Procesado y representación de la forma de mallado o matriz 3D
-Texturización: Procesado y representación del color
-Animación: Procesado y representación del movimiento.
-Edición: post-producción y edición de los distintos elementos.
-Renderizado: Representación final del material audiovisual.
Para comenzar el proceso, se sitúa el objeto que se desea capturar en el centro de la estancia. Todas las cámaras enfocan al objeto, en el centro de la esfera de la estancia. Así, al situar el objeto en el centro de la instalación su imagen queda recogida por las cámaras sin que quede ningún rincón oculto. La función de cada una de las cámaras es conseguir la captura simultánea desde distintos puntos de vista del objeto. Todo el proceso ha de ser realizado preferentemente de manera regular y equidistante, para asegurar la homogeneidad del resultado de la captura.
Al situar un objeto en el interior de la instalación su imagen es capturada simultáneamente por todas las cámaras que le rodean. La información recibida es almacenada directamente en un ordenador para su correcto procesamiento. Cada fotograma capturado se almacena referenciado el momento de la toma y el lugar desde el que ha sido realizado. Es indispensable almacenar y manipular estos datos para todo el proceso.
Una vez recibida la toma de datos, el sistema realiza el cálculo de la silueta provocada por cada fotograma, separando la imagen capturada y el fondo. Toda la información es fácilmente analizable de manera autónoma ya que viene digitalmente suministrada gracias al CCD o CMOS de la cámara digital, por un mapa de bits bidimensional. El contraste de color generará una línea de contorno representa el espacio ocupado por el objeto. El contorno se traslada a un programa tridimensional, representándose la superficie como intersección de rectas y vectores donde un punto del plano puede definirse por coordenadas contenidas en un plano perpendicular al ángulo de ataque de la cámara con respecto al objeto. Sabiendo, de antemano, la cámara desde la que se tomó el fotograma, se puede colocar el plano exactamente en el espacio virtual y delimitar el contorno que representa a la figura en ese preciso punto del espacio.
La representación de cada punto-pixel de cámara indica la posición de una línea convergente, en el CCD o CMOS de la cámara, de tal forma que delimitada por los valores de inclinación, ángulo de ataque, posición y lente conocidos establecerán una única ecuación de línea.
La representación del punto en el espacio se realizará mediante el cálculo de intersección de dos o más líneas gracias a la representación paramétrica de una recta en función de un punto y su vector.
Las distintas representaciones planas, obtenidas en un preciso momento, gracias a la suma del total de las cámaras dispersas en el espacio, generarán una red de líneas que de manera global se combinarán para generar una estructura o malla tridimensional.
Las representaciones tridimensionales son el resultado de pesar, vectorialmente, los puntos de las distintas proyecciones. La uniformidad de los segmentos generados vendrá avalada por la equidistancia de las cámaras entre sí devolviendo al sistema un número proporcional de caras relacionado con el número total de cámaras instaladas y su correspondiente resolución, pudiéndose ampliar la calidad de la captura incrementando la definición de los píxeles capturados o bien incrementando el número de cámaras en la instalación. También es posible mejorar la resolución, interpolar, a posteriori; mediante un proceso de suavizado de malla para obtener un objeto de más caras y vértices. El proceso inverso habilita reducir las caras del resultante, con el fin de optimizar las operaciones requeridas reduciendo la capacidad de almacenamiento y procesamiento de los datos pero perdiendo también la calidad.
Las imágenes obtenidas por la cámara servirán para generar una textura bidimensional que serán proyectadas al objeto basándose en los distintos ángulos de ataque de las cámaras. Debido a que la información de píxeles puede dar lugar a redundancia...
Reivindicaciones:
1. Sistema de captura y procesado de imágenes tridimensionales con movimiento caracterizado porque comprende una estancia (1) con forma esférica, donde el objeto (2) a grabar se posiciona en el centro, un sistema de iluminación difusa y homogénea de la estancia (1) ,
un sistema de adquisición de la imagen, que comprende una pluralidad de cámaras (3) dispuestas alrededor
del objeto (2) de manera equidistante, y preferentemente guardando equidistancia entre ellas, un módulo de procesamiento (4) de la información con sistema de almacenamiento, donde las cámaras (3) envían la información captada,
un sistema representación tridimensional (5) , que por un lado, calcula las rectas convergentes al objetivo de 10 cada cámara (3) , y por otro lado, pone en común la información de cada cámara (3) para lograr la intersección de las diferentes rectas, definiendo cada par de rectas secantes un punto en el espacio tridimensional.
2. Procedimiento de captura y grabación de imágenes tridimensionales con movimiento, caracterizado porque comprende las siguientes etapas:
(a) se captura la imagen inicial del objeto (2) y sus movimientos a través de una pluralidad de cámaras (3) 15 dispuestas alrededor de dicho objeto (2) en una estancia (1) esférica.
(b) se envía la imagen captada simultáneamente por todas las cámaras (3) a un módulo de procesamiento (4) para la separación de la imagen y el fondo.
(c) a través de un sistema de representación tridimensional (5) se representa la imagen, mediante la puesta en común de la información captada por cada cámara (3) en un mismo instante.
3. Procedimiento de captura y grabación de imágenes tridimensionales con movimiento, según reivindicación 2, caracterizado porque la información captada por cada cámara (3) viene dada por el cálculo de las rectas convergentes al objetivo de cada cámara (3) y la intersección de cada par de rectas secantes en un mismo instante y que definen un punto en el espacio.
FIG. 1
FIG. 2
Patentes similares o relacionadas:
GENERACION DE VALORES DE PIXELES UTILIZANDO METODOLOGIAS ESTRICTAMENTE DETERMINISTICAS PARA GENERAR PUNTOS DE MUESTRA., del 1 de Mayo de 2007, de MENTAL IMAGES GMBH & CO. KG.: Un sistema de gráficos informáticos para generar un valor de píxeles para un píxel de una imagen, siendo el píxel representativo de un punto […]
REPRESENTACIÓN DE UN OBJETO POR MEDIO DE UNA IRRADIACIÓN ASÍ COMO RECONSTRUCCIÓN UTILIZANDO DATOS DE IRRADIACIÓN SIMULADOS, del 22 de Septiembre de 2011, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la representación de un objeto por medio de un dispositivo de medición adecuado para la irradiación del objeto , […]
PERFECCIONAMIENTOS EN LA EDICIÓN Y/O PUBLICACIÓN DE NOVELAS, del 16 de Enero de 1960, de ALSINA GALIANA, JORGE: Perfeccionamientos en la edición y/o publicación de novelas, consistentes esencialmente en que la edición y/o publicación de las novelas se efectúa […]
 UNA PROYECCIÓN TRIDIMENSIONAL SOBRE POLIPANTALLA, del 1 de Agosto de 1954, de BÁRCENA GUZMÁN, JOSÉ: Proyección tridimensional sobre polipantalla, caracterizado porque en las aplicaciones posicionales oblicuas, estas tienen lugar sobre elementos polipantalla en ángulo […]
UNA PROYECCIÓN TRIDIMENSIONAL SOBRE POLIPANTALLA, del 1 de Agosto de 1954, de BÁRCENA GUZMÁN, JOSÉ: Proyección tridimensional sobre polipantalla, caracterizado porque en las aplicaciones posicionales oblicuas, estas tienen lugar sobre elementos polipantalla en ángulo […]
PERFECCIONAMIENTOS EN EL PROCEDIMIENTO DE VENTAS CON CUPONES PRIMA, del 1 de Marzo de 1948, de SÁNCHEZ PLAZA, FRANCISCO: Perfeccionamiento en los procedimientos de venta de cupón, caracterizado, por canjearse el cupón que entrega el comerciante al comprador, por metálico en la Sociedad explotadora […]
Técnicas gráficas por ordenador para modelar tela, del 18 de Mayo de 2016, de FXGear Inc: Método implementado por ordenador para simular el movimiento de una tela modelada como un modelo de partículas, que comprende las etapas de: fijar unidades de […]
Método y sistema para la reconstrucción virtual en 3d en tiempo real de una escena en directo y medios legibles informáticamente, del 4 de Mayo de 2016, de Virtually Live (Switzerland) GmbH: Un método para la reconstrucción virtual en 3D en tiempo real de una escena en directo en un sistema de animación que incluye un procesador, […]
 Procedimiento para la representación de un objeto animado, del 11 de Diciembre de 2015, de Schreiber&Friends: Procedimiento para la representación de un objeto animado en forma de una secuencia de animación (3a, 3b) mediante creación de una sucesión […]
Procedimiento para la representación de un objeto animado, del 11 de Diciembre de 2015, de Schreiber&Friends: Procedimiento para la representación de un objeto animado en forma de una secuencia de animación (3a, 3b) mediante creación de una sucesión […]