Sistema y procedimiento automatizado de clasificación de atunes congelados por especie.
Sistema y procedimiento automatizado de clasificación de atunes congelados por especie,
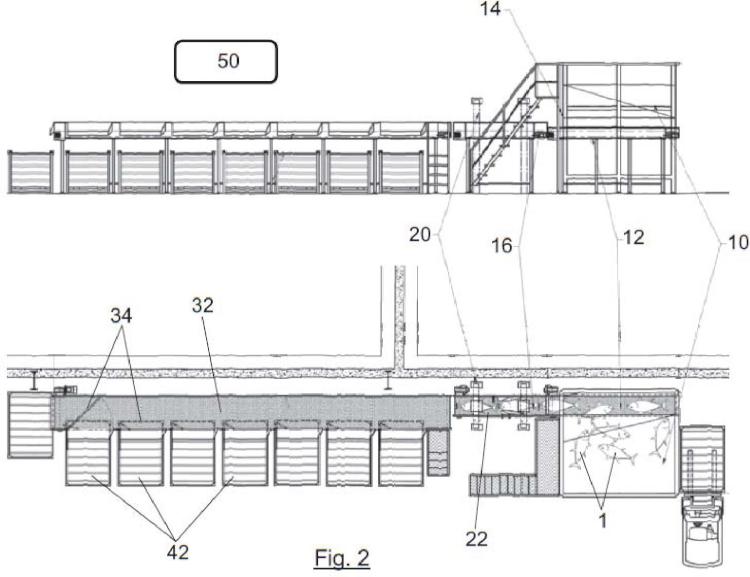
que acceden a una zona de escaneado por una cinta transportadora (22). El sistema comprende:
- al menos un emisor láser (24) encargado de emitir un haz láser (28) sobre el atún (1);
- medios de captación de imágenes (26) para capturar imágenes tridimensionales del haz láser (28) proyectado sobre el atún (1);
- medios de procesamiento de datos para:
- detectar el haz láser (28) en cada imagen;
- obtener el perfil bruto (27) del atún a partir del haz láser (28) detectado;
- generar, a partir de los perfiles brutos (27) obtenidos, una nube de puntos tridimensional (29) del atún;
- descomponer la nube de puntos tridimensional (29) en parámetros geométricos que corresponden a medidas y relaciones que definen la biometría del atún y su especie;
- estimar la especie del atún mediante un árbol de decisión y una comparativa de los parámetros geométricos del atún con una serie de medidas y relaciones patrones.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430527.
Solicitante: TECNOLOGIA MARINA XIMO, S.L.
Nacionalidad solicitante: España.
Inventor/es: GRACIA SALVADOR,JOAQUIN, MINIÑO ARBILLA,Iñaki.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B07C5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B07 SEPARACION DE SOLIDOS; CLASIFICACION. › B07C CLASIFICACION POSTAL; CLASIFICACION DE OBJETOS INDIVIDUALES O DE UN MATERIAL A GRANEL MANIPULABLE PIEZA POR PIEZA COMO OBJETOS INDIVIDUALES (especialmente adaptada a un fin determinado previsto en otra clase, ver la clase apropiada, p. ej. A43D 33/06, B23Q 7/12). › Clasificación según una característica o una particularidad de los objetos o del material a clasificar, p. ej. clasificación controlada por un dispositivo que detecta o mide esta característica o particularidad; Clasificación con ayuda de dispositivos manuales, p. ej. sistemas de agujas (clasificación exclusivamente manual B07C 7/00; separación de diferentes sólidos unos de otros por cribado, tamizado o utilización de corrientes de gas, u otra separación por vía seca para materiales a granel B07B; selección de monedas G07D).
- B07C5/10 B07C […] › B07C 5/00 Clasificación según una característica o una particularidad de los objetos o del material a clasificar, p. ej. clasificación controlada por un dispositivo que detecta o mide esta característica o particularidad; Clasificación con ayuda de dispositivos manuales, p. ej. sistemas de agujas (clasificación exclusivamente manual B07C 7/00; separación de diferentes sólidos unos de otros por cribado, tamizado o utilización de corrientes de gas, u otra separación por vía seca para materiales a granel B07B; selección de monedas G07D). › las medidas se toman por medios fotosensibles.
- G01N21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad).
Fragmento de la descripción:
Sistema y procedimiento automatizado de clasificación de atunes congelados por especie.
Campo de la invención
La presente invención se engloba dentro del campo de los sistemas de clasificación automática de atunes congelados mediante el uso de visión artificial.
Antecedentes de la invención
En la actualidad diversas pesquerías traen sus atunes congelados llegando a las instalaciones portuarias, frigoríficos de almacenamiento intermedio o fábricas de conserva a granel, bien en bodegas de buques factoría, mercantes o en el interior de contenedores frigoríficos transportados por camiones. Los ejemplares de peces de diferentes tamaños (tallas) y especies, generalmente están mezclados en estos contenedores, y un porcentaje indeterminado de ejemplares presentan diferentes anomalías de calidad, debidas a rozamientos, golpes y, sobre todo, a aplastamientos.
Con el fin de optimizar los actuales procesos de producción (separaciones por especies, tallas y ejemplares con deformidades) que se realizan en estos momentos de manera manual, y para aportar un valor añadido al producto, ya que se podría certificar su calidad y aumentar el beneficio de las empresas y consecuentemente de toda la cadena de valor, la presente invención propone un sistema automático que permite la separación de especies de atún congelado comercialmente más importantes, en función de su especie, talla/peso o por ejemplares que presenten deformidades que impidan su posterior comercialización o procesado específico.
Aunque las aplicaciones de la visión artificial no son nuevas en su aplicación para el procesado de pescado, no se conocen desarrollos específicos capaces de analizar las especies de atunes. Así, por ejemplo, los documentos de patente US2008137104-A1, EP2559336-A1, CH701341-A2, W02012008843-A1 y US4934537-A divulgan el uso de técnicas de visión artificial para realizar una identificación de peces de manera automática. En ellos se emplean cámaras y medios de iluminación para obtener imágenes, las cuales son analizadas y se obtienen distintos parámetros del pez, tales como biomasa, dimensiones del pez (longitud, grosor), peso y defectos o enfermedades. En la mayoría de los casos los peces son conducidos por cintas transportadoras, o bien se mueven libremente en el agua, cuando se realiza la identificación y clasificación. Sin embargo, en ninguno de ellos se lleva a cabo una identificación de la especie de atún, únicamente de parámetros más sencillos de identificar como son el peso, el volumen y las deformidades.
De hecho, la identificación de la especie de atún es una labor extremadamente dificultosa, que se lleva a cabo de manera manual por inspección visual de operarios. En el documento de patente CN102749361-A se divulga un método automático para identificar la especie de atún, basado en el troceado del pez, calentamiento del mismo y análisis del gas emitido, siendo éste un método complejo, costoso y destructivo, ya que exige el troceado del pez. No se conocen métodos de identificación de especies de túnidos mediante técnicas de visión artificial, dada la enorme similitud entre las especies.
No se conocen métodos de identificación automática de especies de túnidos que no impliquen la destrucción del ejemplar. Por tanto, en la actualidad, no se conocen métodos automáticos de identificación de túnidos que puedan emplearse en un contexto productivo donde se necesite una respuesta en tiempo real.
Además, las invenciones conocidas en los anteriores documentos de patente no permiten solucionar las necesidades existentes en una planta industrial de procesado de atunes congelados debido a no cumplir con los requerimientos de rendimiento por ton/h, no alcanzar unos mínimos porcentajes de efectividad o no poder cumplir con las condiciones ambientales de trabajo (muchas veces por debajo de los 0o C) con los consiguientes problemas técnicos y de operativa. Es por ello que todavía se hace el trabajo de selección de manera manual con la merma en la productividad que ello supone. Asimismo ese trabajo manual no se puede emplear para la selección de todas las especies de túnidos comerciales pues en algunas tallas las especies presentan tanta similitud que solo un sistema capaz de captar diferencias mínimas puede hacer esa selección. La presente invención resuelve dichos problemas.
Descripción de la invención
La presente invención presenta una solución que supera las limitaciones anteriormente descritas, siendo el primer sistema de visión artificial capaz de identificar las especies concretas de los atunes congelados. Además de realizar una separación de los atunes por especie, permite realizar una separación por tamaño y por deformidades.
Con respecto a la separación por especies, el actual proceso se realiza manualmente bajo criterio subjetivo de los operarios. El ojo y el cerebro humano son capaces de distinguir, de forma natural y automática, los ejemplares de una especie de atún y diferenciarlos de los propios de otras. La presente invención es capaz de identificar de manera automática estas diferencias. Para ello se han realizado diversos estudios de la biología de las especies en las que se analizaron las diversas características de forma y color que pueden llegar a tener, además de estudiar la evolución de las mismas a lo largo de su crecimiento, debido a la posibilidad de que se produzcan cambios significativos en alguno de los parámetros morfológicos. Como dificultad adicional a la de trabajar con seres vivos con notables diferencias intraespecíficas, los atunes congelados llevan adheridos en su superficie elementos extraños, tales como salmuera y escarcha, o pueden tener daños físicos y deformidades que dificulten la identificación de la especie de atún. La presente invención permite detectar la presencia de elementos extraños (salmuera, escarcha, daños físicos, etc.) adheridos a la superficie de los peces mediante la adquisición y el procesado de imágenes 3D de los ejemplares separados para evitar que estos elementos extraños engañen al sistema y produzca un error en la identificación de la especie.
Con respecto a la separación por tamaños, actualmente en algunas plantas de procesado los ejemplares se separan manualmente o por procesos mecánicos de criba únicamente en pocas tallas. Todos aquellos ejemplares con un peso superior a 20 kilogramos se catalogan como de una misma categoría, debido a la imposibilidad de manipularlos manualmente debido al peso. La presente invención permite realizar una clasificación automática con un mayor número categorías para tallas debido a las diferencias de rendimiento entre las mismas, permitiendo además que la discriminación por tallas pueda ser variable y configurable en tiempo real, en función de las necesidades concretas. El usuario final puede determinar de forma dinámica (cada vez que desee configurar el sistema) los rangos de tamaño que definan cada una de las categorías o tallas en las que quiera separar los ejemplares recibidos. Gracias a la alta resolución de las imágenes con las que trabaja el sistema de visión, la presente invención es capaz de diferenciar los ejemplares de atunes por tamaños de forma muy precisa (>98%), mejorando los sistemas de clasificación por tallas tradicionales. Además, ofrece no solo un informe final con las piezas de atunes de cada una de las categorías de tallas previamente fijadas, sino que también ofrece la posibilidad de conocer los kilogramos reales de cada uno de atunes (sin necesidad de pesarlos uno a uno mediante báscula) y consecuentemente la totalidad de la partida analizada. Otro asunto capaz de resolver la presente invención es que al estar
todo el sistema controlado por un ordenador se puede demandar con suma precisión que se prepare un contenedor con un número determinado de piezas o con un peso determinado en kilogramos, algo que actualmente es difícil de hacer debido a la operativa de tratamiento de los peces en una planta industrial.
Con respecto a la separación de ejemplares con deformidades, hay que tener en cuenta que durante los procesos previos a la recepción de los peces algunos ejemplares sufren daños, debidos a la manipulación y transporte (roces y golpes) o a aplastamientos por sobrepeso debido a una acumulación excesiva previa a la congelación (o rotura de la cadena de frío). La presente invención permite realizar una separación automática de aquellos ejemplares que presenten determinadas deformidades, de forma configurable por el usuario. Debido a que los atunes presentan grandes diferencias entre ejemplares de la misma especie y talla, estas deformidades deben ser muy evidentes, como por ejemplo, la ausencia de una parte de atún o bien una deformidad que afecte a una superficie importante...
Reivindicaciones:
1. Procedimiento automatizado de clasificación de atunes congelados por especie, donde los atunes (1) congelados acceden a una zona de escaneado por una cinta transportadora (22) separados a cierta distancia unos de otros, caracterizado por que comprende:
- emitir un haz láser (28) sobre el atún (1) a su paso por la zona de escaneado;
- capturar imágenes tridimensionales del haz láser (28) proyectado sobre el atún (1) a su paso por la zona de escaneado;
- detectar el haz láser (28) en cada imagen capturada;
- obtener el perfil bruto (27) del atún en cada imagen capturada a partir del haz láser (28) detectado;
- generar, a partir de los perfiles brutos (27) obtenidos en las distintas imágenes capturadas, una nube de puntos tridimensional (29) del atún;
- descomponer la nube de puntos tridimensional (29) en una pluralidad de parámetros geométricos que corresponden a una serie de medidas y relaciones que definen la biometría del atún y su especie;
- estimar la especie del atún mediante un árbol de decisión y una comparativa de los parámetros geométricos del atún con una serie de medidas y relaciones patrones.
2. Procedimiento según la reivindicación 1, caracterizado por que el haz láser (28) es perpendicular a la cinta transportadora (22).
3. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que el haz láser (28) es de color rojo.
4. Procedimiento según la reivindicación anterior, caracterizado por que la longitud de onda del haz láser (28) es de 660 nm.
5. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que para la detección del haz láser (28) las imágenes capturadas son filtradas para detectar únicamente el rango de color empleado por el haz láser (28).
6. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que las imágenes tridimensionales son tomadas frontalmente a la marcha de la cinta transportadora (22) en una posición superior y angulada.
7. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que para la obtención del perfil bruto (27) del atún en cada imagen se identifican las zonas que tienen volumen que corresponden al atún, y se eliminan las zonas planas que corresponden con la cinta transportadora (22).
8. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que para la obtención del perfil bruto (27) del atún en cada imagen se utiliza únicamente la línea central del haz láser (28) de mayor intensidad de color, eliminando el resto del haz láser (28) de menor intensidad debida a la difusión del haz láser sobre la escarcha del atún (1) congelado.
9. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que los parámetros geométricos están relacionados entre sí y se encuentran ponderados en función de su representatividad para la definición de la especie.
10. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que las imágenes son capturadas en un habitáculo protegido de la luz exterior y sin
iluminación.
11. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que la captura de las imágenes tridimensionales se realiza mediante dos cámaras 3D (26) dispuestas a cada lado de la cinta transportadora (22), en una posición superior y angulada.
12. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por comprende estimar, a partir de la nube de puntos tridimensional (29), el volumen y el peso del atún.
13. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por comprende detectar las deformidades presentes en el atún (1) producidas por rozamientos, golpes o aplastamientos.
14. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por comprende detectar el paso de un atún (1) por la zona de escaneado para iniciar el proceso de captura de imágenes.
15. Sistema automatizado de clasificación de atunes congelados por especie, donde los atunes (1) congelados acceden a una zona de escaneado por una cinta transportadora (22) separados a cierta distancia unos de otros, caracterizado por que comprende un módulo de escaneado (20) con:
- al menos un emisor láser (24) encargado de emitir un haz láser (28) sobre el atún (1) a su paso por la zona de escaneado;
- medios de captación de imágenes (26) configurados para capturar imágenes tridimensionales del haz láser (28) proyectado sobre el atún (1) a su paso por la zona de escaneado;
- medios de procesamiento de datos configurados para:
detectar el haz láser (28) en cada imagen capturada;
obtener el perfil bruto (27) del atún en cada imagen capturada a partir del haz láser (28) detectado;
generar, a partir de los perfiles brutos (27) obtenidos en las distintas imágenes capturadas, una nube de puntos tridimensional (29) del atún;
descomponer la nube de puntos tridimensional (29) en una pluralidad de parámetros geométricos que corresponden a una serie de medidas y relaciones que definen la biometría del atún y su especie;
estimar la especie del atún mediante un árbol de decisión y una comparativa de los parámetros geométricos del atún con una serie de medidas y relaciones patrones.
16. Sistema según la reivindicación 15, caracterizado por que al menos un emisor láser (24) se dispone con una orientación tal que el haz láser (28) es perpendicular a la cinta transportadora (22).
17. Sistema según cualquiera de las reivindicaciones 15 a 16, caracterizado por que el módulo de escaneado (20) comprende dos emisores láser (24) dispuestos a cada lado de la cinta transportadora (22) y cuyos haz láser (28) son perpendiculares a la cinta transportadora (22) y coincidentes.
18. Sistema según cualquiera de las reivindicaciones 15 a 17, caracterizado por que el al menos emisor láser (24) emite un haz láser (28) de color rojo.
19. Sistema según la reivindicación anterior, caracterizado por que la longitud de onda del
haz láser (28) es de 660 nm.
20. Sistema según cualquiera de las reivindicaciones 15 a 19, caracterizado por que para la detección del haz láser (28) los medios de procesamiento de datos están configurados para filtrar las imágenes capturadas para detectar únicamente el rango de color empleado por el haz láser (28).
21. Sistema según cualquiera de las reivindicaciones 15 a 20, caracterizado por que los medios de captación de imágenes (26) se disponen frontalmente a la marcha de la cinta transportadora (22) en una posición superior y angulada.
22. Sistema según cualquiera de las reivindicaciones 15 a 21, caracterizado por que para la obtención del perfil bruto (27) del atún en cada imagen los medios de procesamiento de datos están configurados para identificar las zonas que tienen volumen que corresponden al atún, y eliminar las zonas planas que corresponden con la cinta transportadora (22).
23. Sistema según cualquiera de las reivindicaciones 15 a 22, caracterizado por que para la obtención del perfil bruto (27) del atún en cada los imagen medios de procesamiento de datos están configurados para utilizar únicamente la línea central del haz láser (28) de mayor intensidad de color, eliminando el resto del haz láser (28) de menor intensidad debida a la difusión del haz láser sobre la escarcha del atún (1) congelado.
24. Sistema según cualquiera de las reivindicaciones 15 a 23, caracterizado por que los parámetros geométricos están relacionados entre sí y se encuentran ponderados en función de su representatividad para la definición de la especie.
25. Sistema según cualquiera de las reivindicaciones 15 a 24, caracterizado por que el módulo de escaneado (20) comprende una carcasa exterior y unas bandas de protección en la zona de entrada y salida de los atunes que definen un habitáculo protegido de la luz exterior y sin iluminación en el que las imágenes son capturadas.
26. Sistema según cualquiera de las reivindicaciones 15 a 25, caracterizado por que los medios de captación de imágenes (26) comprenden dos cámaras 3D (26) dispuestas a cada lado de la cinta transportadora (22), en una posición superior y angulada.
27. Sistema según cualquiera de las reivindicaciones 15 a 26, caracterizado por que los medios de procesamiento de datos están configurados para estimar, a partir de la nube de puntos tridimensional (29), el volumen y el peso del atún.
28. Sistema según cualquiera de las reivindicaciones 15 a 27, caracterizado por que los medios de procesamiento de datos están configurados para detectar, a partir de los parámetros geométricos, las deformidades presentes en el atún (1) producidas por rozamientos, golpes o aplastamientos.
29. Sistema según cualquiera de las reivindicaciones 15 a 28, caracterizado por que el módulo de escaneado (20) comprende medios sensores de presencia encargados de detectar el paso de un atún (1) por la zona de escaneado y así activar los medios de captación de imágenes (26) para iniciar el proceso de captura de imágenes.
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
METODO Y SISTEMA PARA FORMULAR UNA COMPOSICIÓN REQUERIDA A PARTIR DE AL MENOS UN INGREDIENTE DE COMPOSICIÓN VARIABLE, del 25 de Junio de 2020, de SIGMA ALIMENTOS, S.A. DE C.V: Un método y sistema para formular una composición requerida para producir un producto determinado a partir del suministro de al menos un ingrediente […]
SISTEMA Y APARATO DE ILUMINACIÓN PARA EXPERIMENTOS ÓPTICOS, del 22 de Mayo de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: La invención se refiere a un sistema y aparato de iluminación, para la iluminación de experimentos ópticos, en donde el sistema comprende una fuente de poder, […]
Prueba no destructiva remota, del 13 de Mayo de 2020, de DolphiTech AS: Un aparato de inspección para habilitar que una persona ubicada remotamente supervise una inspección por otra persona, comprendiendo el aparato: un dispositivo […]
Modelo de flujo promediado por profundidad de múltiples capas superpuestas de una corriente de turbidez, del 22 de Abril de 2020, de EXXONMOBIL UPSTREAM RESEARCH COMPANY: Un procedimiento implementado por ordenador para generar un modelo de flujo de fluido de una corriente de turbidez para predecir la estructura y/o el […]
Sensor de fibra óptica de iluminación, multi paramétrico y con múltiples puntos sensores, del 8 de Abril de 2020, de Egalon, Claudio Oliveira: Un sistema de detección que comprende: una fibra óptica sensible , que tiene un primer y un segundo terminal, que tiene un núcleo , […]
Dispositivo de embalaje y sistema de clasificación para el embalaje direccional de productos y método para el mismo, del 18 de Diciembre de 2019, de DE GREEF'S WAGEN- CARROSSERIE- EN MACHINEBOUW B.V.: Dispositivo de embalaje para el embalaje direccional de productos (P), como verduras y frutas, que comprende: - un sistema de sensor que comprende: un sistema […]
Generación de impulsos láser y espectroscopia utilizando el efecto Talbot temporal y dispositivos correspondientes, del 11 de Diciembre de 2019, de MAX-PLANCK-GESELLSCHAFT ZUR FORDERUNG DER WISSENSCHAFTEN E.V.: Método de generación de impulsos láser , que comprende las etapas siguientes - crear un campo de luz circulante en un dispositivo […]