SISTEMA PARA PROGRAMAR ROBOTS O APARATOS AUTOMATICOS SIMILARES, QUE COMPRENDE UN TERMINAL DE PROGRAMACION PORTATIL.
Sistema de programación para un robot, o un aparato automático similar,
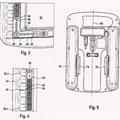
que contiene una herramienta (4), comprendiendo el sistema una unidad de control (5), operativa para controlar los movimientos del robot (1) según varios ejes, y un terminal de programación portátil (6), que está conectado funcionalmente a la unidad de control (5), y comprendiendo el terminal (6): - unos medios de selección (18), que pueden ser accionados manualmente para seleccionar el sistema de coordenadas deseado de una pluralidad de sistemas de coordenadas ("Base", "Herramienta" y "Articulaciones") almacenados en la unidad de control (5); - unos primeros medios de control de movimiento, cuyo funcionamiento depende de la selección realizada a través de los medios de selección (18), comprendiendo dichos primeros medios de control de movimiento una pluralidad de teclas de movimiento (14) que pueden ser accionadas manualmente para proporcionar a la unidad de control (5) una respectiva señal de control para el robot (1), siendo operativa dicha señal de control para aplicar a la herramienta (4) un movimiento de rotación o traslación alrededor o a lo largo del eje correspondiente a la tecla de movimiento pulsada (14), en el sistema de coordenadas seleccionado ("Base", "Herramienta" y "Articulaciones") mediante los medios de selección (18), y - unos medios indicadores de la posición (21), que pueden ser accionados manualmente para almacenar la posición alcanzada por un punto predefinido (TCP) de la herramienta (4) como consecuencia del movimiento del robot (1), caracterizado porque el terminal (6) comprende además unos medios de control de movimiento adicionales (40, 41) que pueden ser accionados manualmente, en lugar de los primeros medios de control de movimiento (14), para proporcionar a la unidad de control (5) una respectiva señal para controlar el robot (1), que es operativa para provocar el desplazamiento del punto predefinido (TCP) de la herramienta (4) en relación con un punto de referencia (CO) establecido previamente, y porque: - la posición del punto de referencia (CO) puede ser modificada, - el terminal (6) comprende unos medios (D, T) para modificar la posición del punto de referencia (CO), y - la señal para controlar el robot (1), generada como resultado del funcionamiento de los medios de control de movimiento adicionales (40, 41), es independiente del sistema de coordenadas ("Base", "Herramienta" y "Articulaciones") seleccionado a través de los medios de selección (18).
Tipo: Resumen de patente/invención.
Solicitante: COMAU S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIA RIVALTA 30,10095 GRUGLIASCO (TORINO).
Inventor/es: FERLA, DAVIDE, LACHELLO, LUCA, GASTALDI, GIANLUCA, CANTELLO, GIORGIO, CALCAGNO, RENZO.
Fecha de Publicación: .
Fecha Concesión Europea: 2 de Noviembre de 2006.
Clasificación Internacional de Patentes:
- B25J13/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › Puestos de control, p. ej. pupitres, cuadros de mando.
- G05B19/425 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Aprendizaje de posiciones sucesivas por control numérico, es decir, siendo introducidas las órdenes para controlar el servoposicionamiento de la cabeza porta-herramienta o del actuador del extremo del brazo.
- H01H9/02 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01H INTERRUPTORES ELECTRICOS; RELES; SELECTORES; DISPOSITIVOS DE PROTECCION DE EMERGENCIA (cables de contacto H01B 7/10; interruptores automáticos de tipo electrolítico H01G 9/18; circuitos de protección, de seguridad H02H; conmutación por medios electrónicos sin cierre de contactos H03K 17/00). › H01H 9/00 Detalles de los dispositivos de conmutación no cubiertos por H01H 1/00 - H01H 7/00. › Bases, envolturas o cubiertas (adaptándose a más de un interruptor o interruptor y otro componente eléctrico H02B 1/26).
Clasificación PCT:
- B25J13/06 B25J 13/00 […] › Puestos de control, p. ej. pupitres, cuadros de mando.
- G05B19/425 G05B 19/00 […] › Aprendizaje de posiciones sucesivas por control numérico, es decir, siendo introducidas las órdenes para controlar el servoposicionamiento de la cabeza porta-herramienta o del actuador del extremo del brazo.
- H01H9/02 H01H 9/00 […] › Bases, envolturas o cubiertas (adaptándose a más de un interruptor o interruptor y otro componente eléctrico H02B 1/26).
Patentes similares o relacionadas:
PROCEDIMIENTO DE CONTROL INTERACTIVO DE UNA MÁQUINA, del 17 de Enero de 2012, de Keinath, Renate: Procedimiento de control interactivo de una máquina en particular una máquina de moldeo por inyección de plástico en el que se guía a un usuario que va introduciendo […]
SISTEMA QUIRURGICO CONTROLADO POR MOTOR QUE TIENE CONTROL DE POSICION., del 1 de Abril de 2005, de SMITH & NEPHEW, INC.: UN SISTEMA QUIRURGICO ADAPTADO PARA OPERAR CON, AL MENOS, UN DISPOSITIVO QUIRURGICO QUE TIENE UNA EMPUÑADURA QUE CONTIENE UN MOTOR QUE ESTA ADAPTADO PARA RECIBIR EL DISPOSITIVO […]
 METODO Y SISTEMA PARA LA PROGRAMACION FUERA DE LINEA DE MULTIPLES ROBOTS INTERACTUANTES, del 1 de Noviembre de 2008, de ABB AB: Un sistema para la programación fuera de línea de múltiples robots interactuantes , que comprende: al menos un robot de manipulación que sujeta una pieza y al menos […]
METODO Y SISTEMA PARA LA PROGRAMACION FUERA DE LINEA DE MULTIPLES ROBOTS INTERACTUANTES, del 1 de Noviembre de 2008, de ABB AB: Un sistema para la programación fuera de línea de múltiples robots interactuantes , que comprende: al menos un robot de manipulación que sujeta una pieza y al menos […]
 Procedimiento para manejar un robot industrial, del 28 de Septiembre de 2016, de Reis Group Holding GmbH & Co. KG: Procedimiento para manejar un robot industrial mediante un dispositivo de mando que comprende la etapa de procedimiento de tocar un elemento […]
Procedimiento para manejar un robot industrial, del 28 de Septiembre de 2016, de Reis Group Holding GmbH & Co. KG: Procedimiento para manejar un robot industrial mediante un dispositivo de mando que comprende la etapa de procedimiento de tocar un elemento […]
PROCEDIMIENTO Y DISPOSITIVO PARA CONTROLAR UNA PLURALIDAD DE MANIPULADORES, del 8 de Septiembre de 2011, de KUKA ROBOTER GMBH: Procedimiento para controlar una pluralidad de manipuladores, con cierto número de unidades de mando que están asignadas a los manipuladores de […]
 TERMINAL PORTATIL PARA CONTROLAR, PROGRAMAR Y/O ENSEÑAR ROBOTS O APARATOS AUTOMATICOS SIMILARES, del 28 de Octubre de 2009, de COMAU S.P.A.: Terminal de indicación y/o de programa, de control portátil previsto para su conexión a una unidad de control de movimientos según los ejes […]
TERMINAL PORTATIL PARA CONTROLAR, PROGRAMAR Y/O ENSEÑAR ROBOTS O APARATOS AUTOMATICOS SIMILARES, del 28 de Octubre de 2009, de COMAU S.P.A.: Terminal de indicación y/o de programa, de control portátil previsto para su conexión a una unidad de control de movimientos según los ejes […]
Composición de disipador de calor para disyuntor y centro de carga resistivo eléctricamente y conductor térmicamente y método de preparación para la misma, del 17 de Junio de 2020, de Eaton Intelligent Power Limited: Un interruptor de circuito resistivo eléctricamente compuesto al menos parcialmente por un material que comprende: un primer componente , que comprende: […]
Dispositivo de señalización de una falla eléctrica en un aparato de protección eléctrica, y aparatos que lo componen, del 13 de Mayo de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Dispositivo de señalización de disparo de un aparato de protección eléctrica como un disyuntor alojado en una carcasa aislante. que contiene un par de contactos fijo […]