Sistema de muestreo de trabajo mecánico para el accionamiento de extensiones articuladas en aplicaciones vehiculares.
Sistema (10) de muestreo de trabajo mecánico para el accionamiento de extensiones articuladas enaplicaciones vehiculares;
el sistema es susceptible de aplicarse en un vehículo (30) oruga y comprende almenos un brazo (40) de soporte y una oruga (22; 23) secundaria asociada a dicho brazo (40) de soporte;pudiéndose configurar dicho brazo (40) de soporte en configuración de rotación en la que rota con respectoa un primer extremo (41) a través de un muestreo del trabajo de un propulsor de dicho vehículo (30) oruga;dicho sistema comprende medios de fricción susceptibles de acoplarse a un extremo de dicho brazo (40) desoporte;
dichos medios de fricción comprenden al menos una polea (70);
dicho sistema está caracterizado porque dicha polea (70) comprende a una sección (71a) cónica truncada yen el que dicho brazo (40) de soporte tiene en su extremo un cuerpo (41a) que termina con una seccióncónica truncada;
siendo dicha sección (71a) cónica truncada de dicha polea (70) y dicha sección (41b) cónica truncada dedicho cuerpo (41a) susceptibles de acoplarse mutuamente en uso.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12151345.
Solicitante: OTO MELARA S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIA VALDILOCCHI, 15 19136 LA SPEZIA ITALIA.
Inventor/es: LA SPINA,GIOVANNI, LAZZARI,SANDRO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D55/075 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 55/00 Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00). › Vehículos con orugas para subir o bajar escaleras (elementos que se adhieren al suelo por adherencia magnética o neumática B62D 55/265; sillas o medios de transporte personales especialmente adaptados para personas minusválidas A61G 5/00).
PDF original: ES-2445022_T3.pdf
Fragmento de la descripción:
Sistema de muestreo de trabajo mecánico para el accionamiento de extensiones articuladas en aplicaciones vehiculares La presente invención se refiere a un sistema de trabajo mecánico, más en particular a un sistema de muestreo de trabajo mecánico para el accionamiento de extensiones articuladas en aplicaciones vehiculares.
Se conoce que los vehículos oruga pueden desplazarse fácilmente por entornos desestructurados y superar obstáculos relativamente altos. La habilidad de desplazarse por terreno agreste y de superar escalones se debe a una pluralidad de factores, de entre los cuales se encuentran al menos la geometría de la oruga y el centro de gravedad del vehículo.
El alto grado de movilidad de los vehículos oruga es particularmente útil en el campo de los sistemas robóticos terrestres, en el que la habilidad de desplazarse por escalones elevados o rampas de escalera es a menudo un requisito muy importante.
Al mismo tiempo, sin embargo, el vehículo oruga debe normalmente llevar sensores y actuadores, cuya presencia y posición se definen para cada caso particular dependiendo de la aplicación o misión para la que esté destinado.
Esto implica un determinado grado de incertidumbre en cuanto a la ubicación exacta del centro de gravedad de un vehículo oruga para aplicaciones robóticas terrestres. En lugar de en relación sólo al vehículo oruga, dicho centro de gravedad puede calcularse sólo después de haber definido todo el conjunto de sensores y actuadores que debe llevar; sin embargo, si los actuadores son móviles, o en cualquier caso si su funcionamiento causa algún cambio de configuración, esto puede conducir a variaciones nada desdeñables en la posición del centro de gravedad del vehículo.
Esta incertidumbre en el cálculo del centro de gravedad de un vehículo oruga para aplicaciones robóticas terrestres es a menudo un problema a la hora de superar algunos tipos de obstáculos, lo que puede poner en peligro la estabilidad del vehículo o incluso, en el peor de los casos, causar el vuelco del vehículo.
Se conoce de la solicitud de patente estadounidense n. ° US2007/0267230, cuya descripción se toma como base para las características de preámbulo de las reivindicaciones independientes 1 y 5, un vehículo oruga articulado que tiene una sección principal, con un armazón principal, y una sección delantera. El armazón principal tiene dos lados y un extremo frontal, e incluye un par de orugas principales paralelas. Cada oruga principal incluye una cinta continua flexible acoplada a un lado correspondiente del armazón principal. La sección delantera incluye un brazo alargado. Un extremo del brazo está acoplado de manera pivotante al armazón principal cerca del extremo delantero del armazón principal alrededor de un eje transversal que es generalmente perpendicular a los lados del armazón principal. El brazo tiene una longitud suficientemente larga para permitir que la sección delantera se extienda por debajo de la sección principal en al menos algunos grados de rotación del brazo, y una longitud menor que la longitud de la sección principal.
También se conocen de la solicitud de patente estadounidense n. ° US2008/0183332 robots vehiculares u otros vehículos proporcionados con una configuración para cambiar sus centros de gravedad para una navegación por obstáculos mejorada. Un chasis de robot con volteadores impulsados pivotantes tiene un cuello pivotante y un cabezal sensor montado hacia la parte frontal del chasis. Los volteadores pueden también moverse selectivamente para reubicar el centro de gravedad.
El problema mencionado anteriormente se ha resuelto parcialmente en el campo de los vehículos denominados no tripulados; en este caso, se han añadido extensiones articuladas a ruedas y orugas. Aunque estas extensiones mecánicas son dispositivos que pueden permitir el control variable de la longitud de un vehículo para hacer este último más estable y menos propenso al vuelco cuando se desplaza por obstáculos, también incrementan la complejidad global de todo el aparato mecatrónico. Cada extensión, de hecho, necesita al menos un actuador adicional para controlar su elevación o extensión, y al menos un actuador adicional cuando la oruga de la extensión se controla de manera autónoma mediante las orugas principales del vehículo.
Por tanto el objeto de la presente invención es dar a conocer un sistema de muestreo de trabajo mecánico para el accionamiento de extensiones articuladas en aplicaciones vehiculares, que esté libre de los inconvenientes descritos anteriormente.
Según la presente invención, un sistema de muestreo de trabajo mecánico para accionar extensiones articuladas en aplicaciones vehiculares se proporciona tal como se reivindica en la primera reivindicación.
La invención se describirá ahora en referencia a los dibujos adjuntos, que ilustran una realización no limitativa de la misma, en los que:
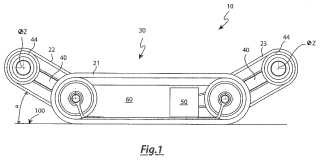
- la figura 1 es una vista lateral de una parte de un vehículo oruga equipado con un sistema de muestreo de trabajo mecánico para accionar extensiones articuladas en aplicaciones vehiculares según la presente invención;
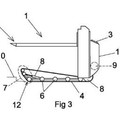
- la figura 2 muestra una vista en planta de un detalle de la figura 1;
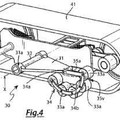
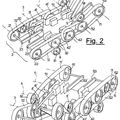
- la figura 3 y la figura 4 respectivamente muestran configuraciones primera y segunda del sistema según la presente invención;
- la figura 5 muestra un detalle de un brazo de soporte del sistema según la presente invención;
- la figura 6 muestra una vista en perspectiva de un detalle de una polea que pertenece al sistema según la presente invención.
Haciendo referencia ahora a la figura 1, el número de referencia 10 designa como un todo un sistema de muestreo de trabajo mecánico para accionar extensiones articuladas en aplicaciones vehiculares.
El sistema 10 está basado en el reconocimiento de la utilidad práctica de una geometría variable de una oruga de un vehículo 30 oruga, y está diseñado especialmente para superar escalones o rampas de escalera.
En particular, el vehículo 30 oruga tiene un primer par de orugas 21 principales, situadas respectivamente en el lado izquierdo y en el lado derecho del vehículo en sí mismo, y una pluralidad de sistemas 10, que comprenden cada uno al menos una oruga secundaria.
Por tanto, el vehículo 30 mostrado en la figura 1 incluye un segundo y un tercer par de orugas 22, 23 secundarias, dispuestos respectivamente como sigue:
- el segundo par de orugas 22 secundarias está situado en una parte frontal del vehículo 30, incluyendo el segundo par de orugas secundarias una oruga instalada en el lado izquierdo y una oruga instalada en el lado derecho; por esta razón están equipados un par de sistemas 10 según la presente invención en la parte frontal del vehículo 30;
- el tercer par de orugas 23 secundarias está situado en una parte trasera del vehículo 30, incluyendo el tercer par de orugas secundarias una oruga instalada en el lado izquierdo y una oruga instalada en el lado derecho; por tanto está también presente un par de sistemas 10 según la presente invención en la parte trasera del vehículo 30.
Las orugas secundarias se mueven en la misma dirección de las orugas 21 principales.
Los pares segundo y tercero de orugas 22, 23 secundarias están instalados, en particular, en una pluralidad de brazos 40 de soporte, que tienen cada uno un primer extremo 41 ajustado en un eje que coincide con el de una rueda impulsada o impulsora que lleva una oruga del primer par de orugas 21 principales, y un segundo extremo 42 en el que está instalada una primera rueda 44 impulsada respectiva, que es susceptible de tensar la oruga secundaria junto con una segunda rueda 45 impulsada (no mostrada en la figura 1 porque la oculta la rueda 32 impulsora de la oruga principal) , que rota alrededor de un eje paralelo al de la primera rueda 44 impulsada.
En la figura 1, por ejemplo, el tercer par de orugas 23 secundarias tiene respectivos brazos 40 de soporte izquierdo y derecho, que están sujetos a una rueda 32 impulsora del par de orugas 21 principales; la rueda 32 impulsora se hace rotar por al menos un propulsor 50 principal, mostrado esquemáticamente como una caja cuadrada por simplicidad.
Cada uno de los brazos 40 de soporte puede rotar alrededor del primer extremo 41, de modo que las orugas secundarias del segundo y tercer par de orugas 22, 23 pueden inclinarse a un ángulo variable a hacia arriba o hacia abajo con respecto a un plano del suelo 100 sobre el que se desplaza el vehículo 30 oruga.
La figura 2, que es una vista en planta de un detalle de la figura 1, muestra un chasis 60 del vehículo 30 oruga, al que se sujeta un árbol sobre el que rota la rueda 32 impulsora,... [Seguir leyendo]
Reivindicaciones:
1. Sistema (10) de muestreo de trabajo mecánico para el accionamiento de extensiones articuladas en aplicaciones vehiculares; el sistema es susceptible de aplicarse en un vehículo (30) oruga y comprende al menos un brazo (40) de soporte y una oruga (22; 23) secundaria asociada a dicho brazo (40) de soporte; pudiéndose configurar dicho brazo (40) de soporte en configuración de rotación en la que rota con respecto a un primer extremo (41) a través de un muestreo del trabajo de un propulsor de dicho vehículo (30) oruga; dicho sistema comprende medios de fricción susceptibles de acoplarse a un extremo de dicho brazo (40) de soporte;
dichos medios de fricción comprenden al menos una polea (70) ;
dicho sistema está caracterizado porque dicha polea (70) comprende a una sección (71a) cónica truncada y en el que dicho brazo (40) de soporte tiene en su extremo un cuerpo (41a) que termina con una sección cónica truncada;
siendo dicha sección (71a) cónica truncada de dicha polea (70) y dicha sección (41b) cónica truncada de dicho cuerpo (41a) susceptibles de acoplarse mutuamente en uso.
2. Sistema según la reivindicación 1, en el que dicho brazo de soporte comprende otra configuración en la que se fija con respecto a dicho vehículo (30) oruga.
3. Sistema según la reivindicación 1, en el que dicho brazo (40) de soporte comprende también un segundo extremo (42) opuesto con respecto a dicho primer extremo; comprendiendo dicho sistema (10) también una primera y segunda rueda (44, 45) , situadas respectivamente en dicho primer y segundo extremo (41, 42) y en las que se instala dicha oruga (22; 23) secundaria.
4. Sistema según la reivindicación 1, en el que dicha sección (71a) cónica truncada de dicha polea (70) y dicha sección (41b) cónica truncada de dicho cuerpo (41a) son respectivamente de tipo macho y hembra o de tipo hembra y macho.
5. Vehículo (30) oruga, que comprende un sistema (10) de muestreo de trabajo mecánico para el accionamiento de extensiones articuladas en aplicaciones vehiculares según las reivindicaciones 1-4.
6. Vehículo (30) oruga según la reivindicación 5, diseñado particularmente para la superación de escalones y rampas, que comprende una pareja de orugas (21) principales cada una instalada en al menos una pareja de ruedas, y en el que por cada rueda de dicha pareja de ruedas de cada una de dichas orugas (21) principales está instalado un sistema (10) según las reivindicaciones 1-4.
7. Vehículo oruga según la reivindicación 5, susceptible de moverse, en uso, sobre el suelo (100) , y en el que dicho brazo (40) de soporte de dicho sistema (10) , en dicha configuración de rotación, varía un ángulo (a) entre sí mismo y dicho suelo (100) .
Patentes similares o relacionadas:
Sistema de desplazamiento para superficies cilíndricas y/o cónicas, del 17 de Julio de 2019, de Fachhochschule Aachen: Sistema de desplazamiento para superficies cilíndricas y/o cónicas, en particular para la superficie exterior o la superficie interior de un conducto o poste […]
Dispositivo de oruga, del 9 de Enero de 2019, de Tas Global Co., Ltd: Un dispositivo de oruga que comprende: una parte de eliminación de película de agua que se proporciona en un miembro (C) de transmisión de potencia que incluye […]
Dispositivo de franqueamiento de obstáculos para una silla de ruedas eléctrica, del 3 de Mayo de 2017, de NEW LIVE INGENIERIE: Dispositivo de franqueamiento de obstáculos para un vehículo motorizado constituido por: - un chasis conectado a tres ruedas (3a, 3b, 3c) en […]
 Transpaleta de horquilla, del 1 de Julio de 2015, de MARGOLLES LOGISTICS, S.L: Transpaleta de horquilla, del tipo que comprenden una horquilla para soporte y elevación de la carga dispuesta en un palet, unos medios de elevación […]
Transpaleta de horquilla, del 1 de Julio de 2015, de MARGOLLES LOGISTICS, S.L: Transpaleta de horquilla, del tipo que comprenden una horquilla para soporte y elevación de la carga dispuesta en un palet, unos medios de elevación […]
 Dispositivo para la supresión de sacudidas en un vehículo oruga y vehículo oruga asociado, del 18 de Noviembre de 2013, de OTO MELARA S.P.A.: Dispositivo de eliminación de sacudidas de un vehículo oruga que tiene una pluralidad de orugas ;
estando instalado el dispositivo , diseñado […]
Dispositivo para la supresión de sacudidas en un vehículo oruga y vehículo oruga asociado, del 18 de Noviembre de 2013, de OTO MELARA S.P.A.: Dispositivo de eliminación de sacudidas de un vehículo oruga que tiene una pluralidad de orugas ;
estando instalado el dispositivo , diseñado […]
SILLA DE RUEDAS DE ALTA MOVILIDAD., del 16 de Octubre de 2005, de FREUDENBERGER PRENDES,ALVARO: Silla de ruedas de alta movilidad que consiste en un chasis provisto en los laterales de dos orugas y (2') que son accionadas por ruedas […]
MECANISMO DE TRANSPORTE., del 1 de Septiembre de 2004, de GALILEO MOBILITY INSTRUMENTS LTD.: Un mecanismo de transporte para transportar un conjunto que soporta carga , comprendiendo dicho mecanismo de transporte: una vía flexible […]
 SISTEMA DE DESPLAZAMIENTO DE TIPO ORUGA CON CONFIGURACION VARIABLE, del 22 de Octubre de 2009, de OTO MELARA S.P.A.: Sistema de desplazamiento de tipo oruga con configuración variable que comprende #un eje anterior , un eje posterior y por lo menos un eje […]
SISTEMA DE DESPLAZAMIENTO DE TIPO ORUGA CON CONFIGURACION VARIABLE, del 22 de Octubre de 2009, de OTO MELARA S.P.A.: Sistema de desplazamiento de tipo oruga con configuración variable que comprende #un eje anterior , un eje posterior y por lo menos un eje […]