Sistema modular síncrono para la realización de ensayos no destructivos.
Sistema modular síncrono para la realización de ensayos no destructivos el cual comprende al menos:
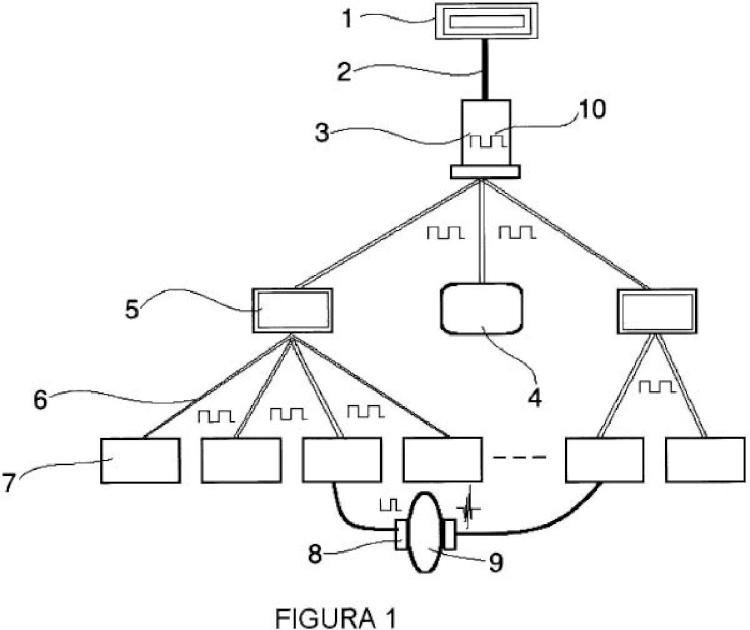
un módulo electrónico (7) conectado con un sensor (8) y que incluye el procesamiento de la señal en tiempo real, una tarjeta de control y sincronismo de todo el sistema (3) y una interfaz de usuario (1). En sistemas con gran número de canales y/o máquinas con muchos ejes, puede requerirse además un módulo de interfaz con máquina (4), un concentrador digital (5) para expandir las capacidades del sistema; y donde los relojes de todos los elementos del sistema están sincronizados con el reloj de la tarjeta de control (3) y las conexiones entre todos los elementos del sistema, excepto la interfaz de usuario, se realizan con fibra óptica full-dúplex.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300065.
Solicitante: TECNATOM,S.A..
Nacionalidad solicitante: España.
Inventor/es: OJEDA ÁLVAREZ,Fernando.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06F19/00
Fragmento de la descripción:
SISTEMA MODULAR SÍNCRONO PARA LA REALIZACIÓN DE ENSAYOS NO
DESTRUCTIVOS
Sector técnico de la invención
La presente invención se encuandra dentro de los sistemas de adquisición de datos en ensayos no destructivos automatizados, generalmente para la inspección de componentes. Puede tratarse de señales de ultrasonidos, de corrientes inducidas, etcétera... incluyendo también los sistemas de evaluación de los datos adquiridos. Antecedentes de la invención
Se denomina ensayo no destructivo a cualquier tipo de prueba practicada a un material que no altere de forma permanente sus propiedades físicas, químicas, mecánicas o dimensionales. Los ensayos no destructivos implican un daño imperceptible o nulo. Se utilizan para descubrir, localizar y evaluar los defectos en la superficie o en el interior de un material o medir cuantitativamente alguna característica de un objeto, es decir, inspeccionar o medir sin necesidad de dañar la pieza.
Los ensayos no destructivos se han practicado por muchas décadas. Se tiene registro desde 1868 cuando se comenzó a trabajar con campos magnéticos. Uno de los métodos más utilizados fue la detección de grietas superficiales en ruedas y ejes de ferrocarril. Las piezas eran sumergidas en aceite y después se limpiaban y se esparcían con un polvo. Cuando una grieta estaba presente, el aceite que se había filtrado en la discontinuidad, mojaba el polvo que se había esparcido, indicando que el componente estaba dañado. Esto condujo a formular nuevos aceites que serían utilizados específicamente para realizar éstas y otras inspecciones. Esta técnica de inspección ahora se llama prueba por líquidos penetrantes.
Sin embargo, con el desarrollo de los procesos de producción, la detección de discontinuidades ya no era suficiente. Era necesario también contar con información cuantitativa sobre el tamaño de la discontinuidad para utilizarla como fuente de información, con el fin de realizar cálculos matemáticos y poder predecir así la vida mecánica de un componente. Estas necesidades condujeron a la aparición de la Evaluación No Destructiva (NDE) o Ensayos No Destructivos (END) como nueva disciplina.
Hoy en día existen una gran cantidad de técnicas para realizar ensayos no destructivos, como son: rayos-X, microondas, termografía, ultrasonidos, líquidos penetrantes, microscopía, partículas magnéticas, corrientes inducidas... Y sus aplicaciones más generales son la detección y evaluación de grietas, detección de fugas, localización
de componentes, medición de dimensiones, determinación de estructuras y microes- tructuras, estimación de propiedades físicas y mecánicas, comportamiento dinámico, selección de materiales y determinación de la composición química.
La industria aeronaútica y las centrales nucleares son dos de los campos de aplicación donde más se requieren este tipo de ensayos. También las vías de los trenes se revisan periódicamente, así como los puentes y las tuberías, en busca de defectos que puedan afectar a la resistencia de los mismos.
Estos ensayos no destructivos pueden realizarse de forma manual o automatizada. En el caso de la inspección automatizada son robots los que realizan la inspección. Los robots son diseñados para inspeccionar de forma automática piezas de grandes dimensiones, debido a que uno de los problemas para inspeccionar de forma manual es la gran cantidad de mediciones necesarias que hay que hacer sobre cada pieza, así como el alto consumo de tiempo que requiere la inspección y el riesgo que representa esta tarea para las personas. Los robots brindan una alternativa para hacer de forma sencilla este tipo de trabajo de una manera segura y eficiente.
Estos robots llevan instalados en sus brazos los sensores que, al ponerse en contacto con la pieza, llevan a cabo la inspección. La señal que emite el sensor se envía a un transductor el cual transforma la magnitud física recibida del sensor en señal eléctrica y la envía al sistema electrónico de adquisición y tratamiento de datos para su posterior estudio.
Para que las medidas obtenidas sean correctas es necesario conseguir una buena relación señal/ruido en las variables trasmitidas desde los sensores hasta el sistema electrónico de adquisición y tratamiento de datos, entendiendo con ello el margen que hay entre la potencia de la señal que se transmite y la potencia del ruido que la corrompe. Este ruido se debe, por lo general, a tres fuentes distintas: la estructura interna del material que está siendo inspeccionado, el ruido que provoca el propio equipo de medición y las interferencias externas que provienen de distintas fuentes (motores, luces, maquinarias, estaciones de radiofrecuencia...).
La invención que aquí se presenta está diseñada, entre otras cosas, para minimizar la influencia de las fuentes externas, que resulta especialmente importante en los sistemas de inspección basados en robots, debido principalmente a sus grandes dimensiones, y a la fuerte actividad electro-magnética que generan sus propios motores y los entornos industriales donde suelen operar.
En el estado de la técnica existen varias alternativas que tratan de lograr este objetivo, como puede verse en las patentes ES2302615A1, que describe un aparato y mé
todo para realizar la detección de defectos en el interior de materiales mediante ultrasonidos y, en particular, con la utilización de métodos digitales para Ensayos No Destructivos (END) por ultrasonidos, incorporando nuevas técnicas de procesamiento digital de señal ultrasónica que facilitan y aseguran dicha detección en condiciones de ruido ambiente impulsivo (ruido EMI) y logrando mayor reducción del nivel ruido y más resolución en la banda pasante mediante la incorporación de filtros digitales programables.
Otra solución se describe en la patente ES2139538 A1 donde se reivindica un sistema de multiplexación y transmisión analógica de señales ultrasónicas mediante fibra óptica. Se trata de un procedimiento de multiplexación óptica y transmisión de las señales eléctricas generadas por los transductores piezoeléctricos, funcionando como receptores de ecos ultrasónicos, mediante la utilización de fibra óptica. Para la transmisión se utiliza la modulación en frecuencia de una subportadora, que a su vez modula la intensidad luminosa de la fuente óptica. Debido a esto, puede realizarse la multiplexación de varias señales procedentes de otros tantos sensores piezoeléctricos, y su transmisión sobre una única fibra para su posterior demultiplexión y estudio. La patente ES2127149 A1 describe un procesador digital remoto de señales ultrasónicas. El aparato objeto de esta patente consiste en una estación remota multicanal, cuya principal novedad radica en que realiza localmente el tratamiento analógico y procesamiento digital de las señales ultrasónicas, con lo que se minimiza la degradación de las mismas por efecto del ruido. El procesador remoto digitaliza y procesa las señales ultrasónicas de los distintos canales de modo secuencial, y opera enviando al Computador Central únicamente un conjunto reducido de datos para realizar la evaluación. El aparato incluye, además, una interfase de comunicación serie que permite realizar comunicaciones de alta velocidad por medio de un cable coaxial a medianas distancias (hasta 200 metros). Su aplicación es de inspección de grandes estructuras como las que se dan en aeronáutica, tuberías, tanques a presión, etc.
La patente ES2188951 A1 describe un dispositivo de ultrasonidos para la inspección de piezas de metal y la patente WO9714021 describe un sistema de adquisición de datos por ultrasonidos portátil. El documento US4974211 describe un sistema de ultrasonidos (100) para la inspección de un objeto (91) el cual comprende una sonda (102), un módulo de procesamiento de señal (104), y un cable de interconexión (106). La sonda incluye un transductor (120) que define múltiples canales de procesamiento de señales CH1-CH12. El módulo de procesamiento de señal incluye un controlador (106), un transmisor (110), un receptor (112), circuitos de retardo (114), y
una sección de vídeo (116).
Así pues, la presente invención, a diferencia de lo existente en el estado de la técnica, persigue:
Predictibilidad: lograr prestaciones independientes del sistema mecánico en el que esté instalado.
Escalabilidad: crecer modularmente desde una configuración mínima de bajo coste hasta configuraciones de altas prestaciones.
Capacidad multi-técnica: disponer de distintas técnicas ENDs (incluyendo corrientes inducidas) integradas en el mismo equipo.
Descripción de la invención
La invención consiste en un sistema modular síncrono para la...
Reivindicaciones:
1) Sistema modular síncrono para la realización de ensayos no destructivos caracterizado porque comprende al menos: un módulo electrónico (7) conectado con un sensor (8) donde el módulo electrónico (7) incluye el procesamiento de la señal en tiempo real, una tarjeta de control y sincronismo de todo el sistema (3) y una interfaz de usuario (1) y donde los relojes de todos los elementos del sistema están sincronizados con el reloj de la tarjeta de control (3) y las conexiones entre todos los elementos del sistema, excepto la interfaz de usuario (1), se realizan con fibra óptica full-duplex.
2) Sistema modular síncrono para la realización de ensayos no destructivos según reivindicación 1 caracterizado porque comprende un módulo de interfaz con máquina (4) y un concentrador digital (5) para expandir las capacidades del sistema.
3) Sistema modular síncrono para la realización de ensayos no destructivos según reivindicación 1 caracterizado porque la interfaz de usuario (1) es un ordenador externo, portátil o de sobremesa, los medios de almacenamiento de datos residen en ella y la conexión entre la tarjeta de control y sincronismo del sistema (3) y la interfaz (1) se hace a mediante TCP/IP sobre Gigabit-Ethernet.
4) Sistema modular síncrono para la realización de ensayos no destructivos según reivindicación 1 caracterizado porque los módulos electrónicos (7) son módulos de varios canales, integrando amplificadores lineal y logarítmico, conversor A/D, procesamiento de señales en tiempo real, y un puerto digital para fibra óptica.
5) Sistema modular síncrono para la realización de ensayos no destructivos según reivindicación 1 caracterizado porque la tarjeta para control y sincronismo de todo el sistema (3) es una tarjeta de formato CompactPCI, con puertos de fibra óptica, entradas para leer codificadores (encoders), un puerto digital y salidas y entradas de señales de sincronismo.
6) Sistema modular síncrono para la realización de ensayos no destructivos según reivindicación 2 caracterizado porque el módulo para interfaz con máquinas grandes (4) tiene entradas digitales/analógicas de propósito general y salidas digitales.
7) Sistema modular síncrono para la realización de ensayos no destructivos según reivindicación 2 caracterizado porque los concentradores digitales (5) para expandir las capacidades del sistema, tienen un puerto raíz y puertos de expansión y pueden encadenarse en dos niveles.
8) Sistema modular síncrono para la realización de ensayos no destructivos según reivindicación 1 ó 2 caracterizado porque todos los módulos son Plug-and-Play ("enchufar y usar"), de tal forma que son reconocidos automáticamente por el software de adquisición en el momento de conexión.
9) Sistema modular síncrono para la realización de ensayos no destructivos cual
quiera de las reivindicaciones anteriores caracterizado porque la arquitectura es en forma de árbol.
Patentes similares o relacionadas:
Sistemas y métodos para tratar, diagnosticar y predecir la aparición de una afección médica, del 15 de Julio de 2020, de Fundação D. Anna Sommer Champalimaud E Dr. Carlos Montez Champalimaud: Aparato para evaluar si es probable que un paciente tenga un estadio patológico favorable de cáncer de próstata, el aparato comprende: (a) un dispositivo de obtención […]
Dispositivo de procesamiento de datos para el procesamiento de valores de medición, del 22 de Abril de 2020, de F. HOFFMANN-LA ROCHE AG: Dispositivo de procesamiento de datos para el procesamiento de valores de medición de un equipo de medición médico, con una unidad de entrada , una […]
Sistema de análisis apuntador de acontecimientos y de gestión de medicación, del 30 de Octubre de 2019, de CAREFUSION 303, INC: Un método para reducir el riesgo de errores de medicación, el método comprende las etapas de: recibir en un dispositivo móvil un primer valor de un parámetro […]
Sistema y método de visualización en 2D y 3D para la inspección de un tubo de horno, del 11 de Septiembre de 2019, de Quest Integrity USA, LLC: Un sistema para la visualización de datos de inspección recogidos de un horno con una geometría física especificada, en donde dicho horno comprende […]
 Reconocimiento anatómico y análisis dimensional para asistir en la cirugía de mama, del 25 de Julio de 2019, de ALLERGAN, INC.: Método implementado por ordenador de determinación de mediciones de la mama de manera automática a partir de una representación tridimensional (3-D) de la parte superior […]
Reconocimiento anatómico y análisis dimensional para asistir en la cirugía de mama, del 25 de Julio de 2019, de ALLERGAN, INC.: Método implementado por ordenador de determinación de mediciones de la mama de manera automática a partir de una representación tridimensional (3-D) de la parte superior […]
Sistemas y métodos para tratar, diagnosticar y predecir la aparición de una afección médica, del 24 de Julio de 2019, de Fundação D. Anna Sommer Champalimaud E Dr. Carlos Montez Champalimaud: Un aparato para evaluar un riesgo de fallo clínico en un paciente después de que el paciente se haya sometido a una prostatectomía radical, y el aparato […]
 Aparato médico controlado remotamente, del 24 de Julio de 2019, de GAMBRO LUNDIA AB: Una unidad de diálisis adaptada para tratar la sangre de un paciente (P) según una terapia prescrita, la unidad de diálisis presenta una interfaz inalámbrica […]
Aparato médico controlado remotamente, del 24 de Julio de 2019, de GAMBRO LUNDIA AB: Una unidad de diálisis adaptada para tratar la sangre de un paciente (P) según una terapia prescrita, la unidad de diálisis presenta una interfaz inalámbrica […]
Interfaces de usuario gráficas (IUG), procedimientos y aparato para la presentación de datos, del 10 de Julio de 2019, de DUNE MEDICAL DEVICES LTD.: Un sistema de análisis de sustrato, comprendiendo el sistema: (a) una sonda que está configurada y operable para explorar un sustrato y determinar uno o más parámetros […]