Sistema y método para realizar la vigilancia perimetral optimizada.
Un método implementado por ordenador para la formación de un cable trampa virtual (64) a través de unasubregión de un área de interés (40),
comprendiendo el método:
realizar un análisis geométrico de un modelo digital del terreno en dicha subregión, determinando dicho análisisgeométrico una ubicación para cada uno de una pluralidad pre-designada de sensores candidatos (42) quepotencialmente pueden ser utilizados en la formación de dicho cable trampa virtual de (64), y una cuenca visual(42a) para cada uno de dichos sensores candidatos (42), representando cada una de dichas cuencas visuales(42a) una región de cobertura para su dicho sensor candidato asociado (42);
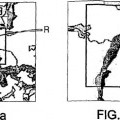
definir un punto inicial geométrico (80) y un punto final geométrico (82) dentro de la subregión para dicho cabletrampa virtual (64); y
analizar dichas cuencas visuales (42a) en respuesta a dicho análisis geométrico para determinar un númeromínimo de dichos sensores candidatos (42) requeridos para formar una trayectoria para dicho cable trampavirtual (64) desde dicho punto inicial (80) hasta dicho punto final (82).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2009/038813.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 NORTH RIVERSIDE PLAZA CHICAGO, IL 60606-2016 ESTADOS UNIDOS DE AMERICA.
Inventor/es: THUNEMANN,PAUL Z, MATTIKALLI,ROBERT W, GRUBE,ROBERT W.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T17/50
- G08B13/183 FISICA. › G08 SEÑALIZACION. › G08B SISTEMAS DE SEÑALIZACION O DE LLAMADA; TRANSMISORES TELEGRAFICOS DE ORDENES; SISTEMAS DE ALARMA. › G08B 13/00 Alarmas contra ladrones, los atracadores o cualquier intruso. › por interrupción de un haz o de una barrera de radiaciones.
- G08B13/196 G08B 13/00 […] › utilizando cámaras de televisión.
- H04W16/18 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04W REDES DE COMUNICACION INALAMBRICAS (difusión H04H; sistemas de comunicación que utilizan enlaces inalámbricos para comunicación no selectiva, p. ej. extensiones inalámbricas H04M 1/72). › H04W 16/00 Planificación de red, p. ej. herramientas de planificación de cobertura o tráfico; Utilización de red, p. ej. división de recursos o estructuras celulares. › Herramientas de planificación de red.
PDF original: ES-2434118_T3.pdf
Fragmento de la descripción:
Sistema y método para realizar la vigilancia perimetral optimizada
Campo La presente divulgación se refiere a sistemas de vigilancia, en general, y más particularmente a un sistema de vigilancia o de detección que emplea una pluralidad de sensores o dispositivos para realizar operaciones de vigilancia o detección a lo largo de una línea o área de límite predeterminado.
Antecedentes Las declaraciones en esta sección proporcionan simplemente información básica relacionada con la presente divulgación y pueden no la técnica anterior.
En el documento WO 03/032622 de desvela un método para la implementación de un cable trampa de vídeo que incluye las etapas de calibrar un dispositivo de detección para determinar los parámetros del dispositivo de detección para su uso por el sistema; inicializar el sistema, incluyendo la entrada al menos un cable trampa virtual; obtener datos del dispositivo de detección; analizar los datos obtenidos del dispositivo de detección para determinar si el al menos un cable trampa virtual se ha cruzado; y desencadenar una respuesta a un cruce del cable trampa virtual. También se conoce a partir del documento US 2007/0265781 que un método implementado por ordenador para generar un modelo de superficie digital de imagen con textura (DSM) para un área geográfica de interés que incluye tanto edificios como terreno puede incluir el uso de un ordenador para generar un modelo de elevación digital (MED) tanto de los edificios como del terreno para el área geográfica de interés. El método puede incluir además proporcionar una colección de imágenes ópticas, que incluye imágenes ópticas oblicuas del área geográfica de interés, incluyendo tanto edificios como el terreno. El ordenador se puede utilizar también para superponer selectivamente las imágenes ópticas oblicuas de la colección de imágenes ópticas en el OEM tanto de los edificios como del terreno para el área geográfica de interés y para generar con ello la DSM de imagen con textura para el área geográfica de interés, que incluye tanto edificios como el terreno.
En el documento 2005/0073411 se describe un aparato para la detección de cualquier intruso pasa a través de una pared electrónica. La pared electrónica se forma por un radar de onda milimétrica situado en un extremo de la pared y una pluralidad de combinaciones de reflectores y retro-reflectores planos colocados a lo largo del suelo de la pared, así como en las estructuras en los dos extremos. La pared se forma de una pluralidad de haces electromagnéticos, teniendo cada haz dos segmentos, uno entre la antena de radar y un reflector plano y el segundo segmento entre el reflector plano y un retro-reflector. Un número suficiente de haces habitan en el volumen de la pared para que un intruso atraviese la pared sin detección esencialmente imposible, aunque el intruso intente tales métodos de evitar la detección como arrastrándose por debajo o saltando por encima de las ubicaciones asumidas de los haces. El principal medio para determinar que un intruso está atravesando la pared es la detección de uno o más haces electromagnéticos que están siendo parcial o completamente bloqueados. Un medio secundario de detección es la reflexión por radar de persona intrusa, que puede ser utilizado para determinar la ubicación de un intruso a lo largo de la extensión de la pared.
También se desvela en el documento US 2006/0033617 un método mediante el que un perímetro se puede asegurar
eficazmente por un sistema de unidades manuales/autónomas fijas/móviles en tierra/agua, por un sistema aeronáutico/de naves espaciales manual/autónomo y por un sistema de barreras físicas. Una amplia gama de equipos de vigilancia, comunicación y científicos se asocian a estos sistemas y están todos asociados a los centros de control fijos/móviles.
La vigilancia de las fronteras geográficas, así como de grandes instalaciones con base terrestre fija tales como edificios, bases militares e instalaciones de fabricación ido creciendo en importancia. En la actualidad, es de particularmente gran interés la realización de la vigilancia de las fronteras de Estados Unidos, e incluso más particularmente la frontera de Estados Unidos con México. Sin embargo, la frontera Estados Unidos/México se extiende más de 3.218, 69 Km (2.000 millas) , y por lo tanto la vigilancia en tiempo real representa un coste 55 significativo y problemas de aplicación.
Las ubicaciones precisas elegidas para los sensores que se van a utilizar para fines de supervisión se eligen normalmente por juicio de ingeniería utilizando una línea perimetral específico que se va a supervisar. Normalmente la línea perimetral sigue, en algunos casos, de cerca o idénticamente a la línea de frontera geográfica. Para cubrir la totalidad de un gran límite perimetral geográfico tal como la frontera de Estados Unidos/México con sensores, tales como los radares y cámaras situadas en puntos separados entre sí a lo largo de la frontera, se requeriría un número excesivamente grande de tales dispositivos. Cubrir toda la frontera de Estados Unidos/México puede requerir miles o incluso decenas de miles de estos sensores o dispositivos. Una implementación de este tipo se vuelve rápidamente económicamente inviable, por no hablar de los retos más importantes que se encuentran con el mantenimiento 65 continuo de miles o más de sensores o cámaras. Complicando esto aún más es que una frontera geográfica, siendo la frontera Estados Unidos/México solamente un ejemplo, discurre a menudo a través de profundos barrancos,
colinas escarpadas y densos bosques. Por lo tanto, la compleja topografía de la frontera hace difícil, si no imposible, que tal frontera se cubra con un número razonable, limitado de sensores.
En diversas partes del mundo, la frontera entre países vecinos discurre a menudo a través de una región 5 montañosa. Las regiones montañosas imponen retos significativos cuando se trata de diseñar una serie de sensores.
Esto se debe a la compleja topografía de tales regiones. Normalmente, los sistemas de vigilancia desarrollados previamente utilizados en regiones montañosas han requerido un gran número de sensores, muchos de los que terminan cubriendo secciones muy pequeñas del área fronteriza que se está supervisando. En algunos casos, esto ha hecho que la protección fronteriza a través de una región montañosa sea económicamente inviable.
Sumario En un aspecto, la presente divulgación se refiere a un método implementado por ordenador para la formación de un cable trampa virtual a través de una subregión de un área de interés. El método implica la realización de un análisis geométrico de un modelo digital del terreno en la subregión, el análisis geométrico que determina una ubicación para cada uno de una pluralidad pre-designada de sensores candidatos que se pueden utilizar potencialmente en la formación del cable trampa virtual. Se determina una cuenca visual para cada sensor candidato. Cada cuenca visual representa una región de cobertura de su sensor candidato asociado. Cada uno de un punto inicial geométrico y punto final geométrico dentro de la subregión se definen para el cable trampa virtual. Las cuencas visuales se analizan en respuesta al análisis geométrico para determinar un número mínimo de sensores candidatos requeridos para formar una trayectoria para el cable trampa virtual desde el punto inicial hasta el punto final.
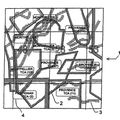
La presente divulgación se refiere también a un método para determinar las ubicaciones de una pluralidad de sensores que se utilizan para supervisar un área geográfica de interés. El método puede comprender: obtener un modelo de elevación digital que incluye como una porción del mismo, el área de interés. Se selecciona un número inicial de sensores candidatos para ser utilizados en la supervisión del área de interés. Un análisis geométrico del terreno en el área de interés se realiza utilizando el modelo de elevación digital, y el número inicial de sensores candidatos, para determinar una cuenca visual para cada uno de los sensores candidatos, representando las cuencas visuales de cada uno de los sensores candidatos una región conformada por un conjunto de subregiones, donde cada subregión tiene una línea de visión directa a su sensor candidato asociado. Todas las cuencas visuales se analizan para determinar un subconjunto mínimo de sensores candidatos que tienen cuencas visuales que forman al menos una trayectoria sustancialmente continua a través del área de interés desde un punto inicial
designado hasta un punto final designado.
En otro aspecto, la presente divulgación se refiere a un sistema para formar un cable trampa virtual a través de una subregión... [Seguir leyendo]
Reivindicaciones:
1. Un método implementado por ordenador para la formación de un cable trampa virtual (64) a través de una subregión de un área de interés (40) , comprendiendo el método:
realizar un análisis geométrico de un modelo digital del terreno en dicha subregión, determinando dicho análisis geométrico una ubicación para cada uno de una pluralidad pre-designada de sensores candidatos (42) que potencialmente pueden ser utilizados en la formación de dicho cable trampa virtual de (64) , y una cuenca visual (42a) para cada uno de dichos sensores candidatos (42) , representando cada una de dichas cuencas visuales (42a) una región de cobertura para su dicho sensor candidato asociado (42) ; definir un punto inicial geométrico (80) y un punto final geométrico (82) dentro de la subregión para dicho cable trampa virtual (64) ; y analizar dichas cuencas visuales (42a) en respuesta a dicho análisis geométrico para determinar un número mínimo de dichos sensores candidatos (42) requeridos para formar una trayectoria para dicho cable trampa virtual (64) desde dicho punto inicial (80) hasta dicho punto final (82) .
2. El método de la reivindicación 1, donde cada una de dichas cuencas visuales (42a) está dividida en una pluralidad de cuñas (42a1, 42a2…42an) , defiendo cada una de dichas cuñas (42an) un subconjunto de puntos que tiene una trayectoria de línea de visión sin obstáculos directa a su dicho sensor asociado (42) .
3. El método de la reivindicación 2, donde cada una de dichas cuña de cuenca visual (42an) forma un nodo (Nodon) , y en caso de superposición entre las cuñas (42an) diferentes de cuencas visuales (42a, 42a') forma un arco dentro de un gráfico de adyacencia de cuñas.
5. El método de la reivindicación 1, donde dicho análisis de dichas cuencas visuales (42a) para determinar un número mínimo de dichos sensores candidatos (42) comprende analizar dichas cuencas visuales (42a) para determinar un número mínimo de dichas cuencas visuales (42a) que permite que dicho cable trampa virtual (64) sea creado con lagunas de distancia predeterminada entre las cuencas visuales (42a) adyacentes, para formar de este modo una trayectoria no continua para dicho cable trampa virtual (64) .
7. El método de la reivindicación 1, donde dicha cuenca visual (42a) de uno dado de dichos sensores candidatos
(42) comprende una porción de dicha subregión de dicha área de interés (40) , donde una línea de visión puede existir desde cualquier punto dentro de dicha porción de dicha subregión dada hasta dicho uno de los sensores candidatos (42) .
9. El método de la reivindicación 1, que comprende además definir un espesor de distancia mínima de dicho cable trampa virtual (64) , y analizar dichas cuencas visuales (42a) para determinar un número mínimo de dichos sensores candidatos (42) que permita que dicho cable trampa virtual (64) se forme con dicho espesor de distancia mínima.
10. El método de la reivindicación 1, que comprende además visualizar, en una pantalla, dicho cable trampa virtual
(64) sobrepuesto en un modelo de elevación digital de dicho terreno en dicha subregión de dicha área de interés 55 (40) .
11. El método de la reivindicación 10, que comprende adicionalmente mostrar, en dicha pantalla, dichas cuencas visuales (42a) de los dichos sensores candidatos (42) seleccionados que han sido utilizados para construir dicho cable trampa virtual (64) , estando dicho virtual de cable trampa (64) superpuesto sobre dichas cuencas visuales (42a) de los dichos sensores candidatos (42) seleccionados.
12. El método de la reivindicación 1, que comprende permitir que una anchura de recorte negativo sea seleccionada antes de analizar dichas cuencas visuales (42a) , representando dicha anchura de recorte negativo un segmento de distancia máxima a lo largo de dicho cable trampa virtual (64) cuando dicho cable trampa virtual de (64) es
determinado, donde no existe superposición de cuencas visuales entre dos de dichos sensores candidatos (42) adyacentes.
13. El método de la reivindicación 1, donde dicho análisis de dichas cuencas visuales (42a) para determinar un número mínimo de dichos sensores candidatos (42) comprende analizar dichas cuencas visuales (42a) para determinar un número mínimo de al menos uno de dispositivos de radar y dispositivos de formación de imágenes ópticas utilizados para formar dicho cable trampa virtual (64) .
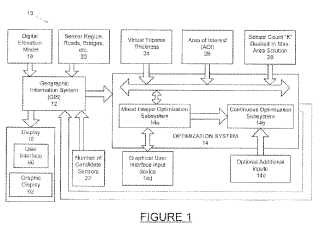
14. Un sistema para la formación de un cable trampa virtual (64) a través de una subregión de un área de interés (40) , comprendiendo el sistema:
un sistema de información geográfica (12) para la realización de un análisis geométrico de un modelo digital del
terreno en dicha subregión, disponiéndose dicho sistema de información geográfica (12) para determinar una ubicación para cada uno de una pluralidad pre-designada de sensores candidatos (42 ) que potencialmente pueden ser utilizados en la formación de dicho cable trampa virtual (64) , y una cuenca visual (42a) para cada uno de dichos sensores candidatos (42) , representando cada una de dichas cuencas visuales (42a) una región de cobertura para su dicho sensor candidato asociado (42) ; y
un sistema de optimización (14) sensible a la información generada por dicho sistema de información geográfica (12) para el análisis de dichas cuencas visuales (42a) para determinar un número mínimo de dichos sensores candidatos (42) necesarios para formar una trayectoria desde un punto inicial designado (80) hasta un punto final designado (82) dentro de la subregión de la trayectoria que representa el cable trampa virtual (64) .
15. El sistema de la reivindicación 14, que comprende además un sistema de visualización (16) adaptado para mostrar una representación del cable trampa virtual (64) .
Patentes similares o relacionadas:
 PROCEDIMIENTO DE RECONSTRUCCIÓN DE IMAGEN EN UN GRAFICO VECTORIAL, del 24 de Mayo de 2011, de NEWSCAPE TECHNOLOGY: Procedimiento de tratamiento de datos de imágenes digitales en forma de gráfico vectorial, comprendiendo las imágenes zonas delimitadas por líneas poligonales, […]
PROCEDIMIENTO DE RECONSTRUCCIÓN DE IMAGEN EN UN GRAFICO VECTORIAL, del 24 de Mayo de 2011, de NEWSCAPE TECHNOLOGY: Procedimiento de tratamiento de datos de imágenes digitales en forma de gráfico vectorial, comprendiendo las imágenes zonas delimitadas por líneas poligonales, […]
 SISTEMA DE CONTROL Y SOPORTE EN EJECUCION DE OBRAS MEDIANTE ESCANEADOLASER, del 8 de Abril de 2011, de FUNDACION CARTIF: La invención se refiere a un sistema de control y soporte en ejecución de obras que comprende un escáner láser , una cámara , un GPS y un sistema inercial […]
SISTEMA DE CONTROL Y SOPORTE EN EJECUCION DE OBRAS MEDIANTE ESCANEADOLASER, del 8 de Abril de 2011, de FUNDACION CARTIF: La invención se refiere a un sistema de control y soporte en ejecución de obras que comprende un escáner láser , una cámara , un GPS y un sistema inercial […]
 METODO Y DISPOSITIVO DE PROCESAMIENTO DE DATOS, del 24 de Agosto de 2010, de TOMTOM INTERNATIONAL B.V.: Un método de procesamiento de datos de píxeles de un campo de vista , en el que el campo de vista comprende una parte de un mapa digital […]
METODO Y DISPOSITIVO DE PROCESAMIENTO DE DATOS, del 24 de Agosto de 2010, de TOMTOM INTERNATIONAL B.V.: Un método de procesamiento de datos de píxeles de un campo de vista , en el que el campo de vista comprende una parte de un mapa digital […]
 PROCEDIMIENTO PARA EL ESTUDIO Y RESOLUCION DE PROBLEMAS MEDIOAMBIENTALES, del 18 de Febrero de 2010, de ABELLA GAVELA, GERARDO: Se describe un procedimiento mediante el que resulta posible el estudio y de problemas medioambientales, tales como la contaminación o la producción de ruidos, por analogía […]
PROCEDIMIENTO PARA EL ESTUDIO Y RESOLUCION DE PROBLEMAS MEDIOAMBIENTALES, del 18 de Febrero de 2010, de ABELLA GAVELA, GERARDO: Se describe un procedimiento mediante el que resulta posible el estudio y de problemas medioambientales, tales como la contaminación o la producción de ruidos, por analogía […]
PROCEDIMIENTO DE PRESENTACION VISUAL DE INFORMACIONES CARTOGRAFICAS EN UNA PANTALLA DE AERONAVE., del 16 de Noviembre de 2005, de THALES: Procedimiento de presentación visual, en una pantalla de aeronave, de varias ventanas (2D5, 3D, PV, PH) que representan cada una un aspecto distinto del terreno […]
PROCEDIMIENTO PARA LA OBTENCION DE UN MODELO TRIDIMENSIONAL DEL TERRENO., del 16 de Diciembre de 2003, de SANCHEZ HERRANZ,JORDI: Procedimiento para la obtención de un modelo tridimensional del terreno. Consiste en: a) Seleccionar los datos necesarios de una base […]
UN METODO PARA PRESENTAR AUTOMATICAMENTE SIMBOLOS DE MAPAS., del 16 de Noviembre de 2002, de RAYTHEON COMPANY: UN METODO PARA VISUALIZAR AUTOMATICAMENTE UNA SIMBOLOGIA DE MAPAS DE UN SISTEMA DE INFORMACION GEOGRAFICA. EN EL METODO, EL ORDENADOR RECUPERA […]
 PROCESO DE PRESENTACION DE INFORMACIONES CARTOGRAFICAS Y DE ZONAS AERONAUTICAS SOBRE LA PANTALLA DE UNA AERONAVE, del 1 de Septiembre de 2008, de THALES: Proceso de síntesis, sobre una pantalla de aeronave, de al menos una primera ventana que representa una imagen cartográfica en vista […]
PROCESO DE PRESENTACION DE INFORMACIONES CARTOGRAFICAS Y DE ZONAS AERONAUTICAS SOBRE LA PANTALLA DE UNA AERONAVE, del 1 de Septiembre de 2008, de THALES: Proceso de síntesis, sobre una pantalla de aeronave, de al menos una primera ventana que representa una imagen cartográfica en vista […]