SISTEMA Y MÉTODO DE PROCESAMIENTO DE DATOS DE IMAGEN.
Método para detectar un objeto en una imagen, dicho método comprende:
a) capturar la imagen; b) proporcionar datos de fotograma de vídeo de un solo color de la imagen en un primer formato que incluye datos de píxeles para una pluralidad de píxeles, los datos de píxeles de cada píxel de imagen consisten en datos de un solo color; c) generar datos de píxeles de múltiples colores para cada píxel de un bloque de detección representativo de una parte de imagen que es un subconjunto de los datos de fotograma de vídeo de un solo color y que se asocia por homografía a dicho bloque de detección, en donde los datos de píxeles de múltiples colores de cada píxel del bloque de detección se generan a partir de datos de píxel de un solo color de píxeles de la parte de imagen identificados utilizando dicha asociación homográfica; d) proporcionar los datos de píxeles de múltiples colores del bloque de detección generados a un algoritmo de detección de objetos adaptado para detectar un objeto dentro del bloque de detección
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2008/008325.
Solicitante: SIEMENS INDUSTRY, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 3333 OLD MILTON PARKWAY ALPHARETTA, GA 30005-4437 ESTADOS UNIDOS DE AMERICA.
Inventor/es: HORTON,David,C.
Fecha de Publicación: .
Fecha Solicitud PCT: 7 de Julio de 2008.
Clasificación Internacional de Patentes:
- G06T3/40C
Clasificación PCT:
- G06K9/00 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
- G06T3/40 G06 […] › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 3/00 Transformación geométrica de la imagen en el plano de la imagen. › Cambio de escala de una imagen completa o de una parte de imagen.
- G06T7/00 G06T […] › Análisis de imagen.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2357371_T3.pdf

Fragmento de la descripción:
La presente invención hace referencia en general a sistemas de captura y detección de imágenes, y más específicamente a métodos y sistemas para la obtención de datos de imagen.
Antecedentes de la invención 5
Cada vez más resulta necesaria la utilización sistemas de detección de vehículos en sistemas de control de tráfico. La detección de la presencia y/o cercanía de vehículos permite alcanzar una eficiencia mejorada en el control del tráfico. En un ejemplo simplificado, una señal de tráfico puede no cambiar a verde para un cruce de calles durante un tiempo indefinido si no hay vehículos presentes en el cruce esperando la señal. Sin embargo, si un vehículo se acerca a la intersección en el cruce de calles, la señal de tráfico puede cambiar en respuesta a la detección del 10 vehículo que se acerca.
Históricamente, la detección de vehículos para el control del tráfico ha utilizado sensores inductivos ubicados debajo de la superficie de la vía. La entrada del automóvil en una región cercana al sensor inductivo cambia el campo magnético percibido, permitiendo de este modo la detección del vehículo. Una desventaja de estos sistemas es la necesidad de implantar los sensores inductivos en la parte inferior o en la superficie del pavimento de la vía, lo cual 15 requiere una obra considerable y la interrupción del tráfico. Debido a que las cámaras de vídeo evitan la necesidad de implantar equipos localizados en la parte inferior de la superficie del pavimento de la vía, los sistemas de detección de vehículos basados en cámaras son cada vez más necesitados.
Son conocidos los sistemas de detección de vehículos basados en cámaras que utilizan procesamiento de vídeo. Un tipo de sistemas de detección de vehículos realiza la detección de vehículos en áreas seleccionadas de los 20 fotogramas de vídeo disponibles provistos por una cámara de vídeo. Con este fin, una cámara de vídeo proporciona la información del fotograma de vídeo, habitualmente en un formato conocido como formato Bayer, a un sistema de procesamiento. El sistema de procesamiento convierte el vídeo en formato Bayer a vídeo en formato RGB (del inglés, red-green-blue, rojo-verde-azul), que es (o es similar a) el formato empleado por la mayoría de los sistemas de vídeo digital. 25
El vídeo con formato RGB se proporciona después al subsistema de detección y opcionalmente a un dispositivo de visualización, tal como por ejemplo un ordenador portátil de ubicación remota. El subsistema de detección emplea después un mapeo por homografía para aislar áreas seleccionadas específicas del fotograma de vídeo para ser utilizadas por los propios algoritmos de detección. En particular, la detección de vehículos habitualmente no ocurre dentro de un fotograma de vídeo entero, sino en áreas aisladas tales como partes de una vía o cerca de objetos 30 específicos. Las áreas deseadas para la detección se convierten entonces en bloques de detección que se estandarizan para los algoritmos de detección.
De este modo, por ejemplo, un área de interés trapezoidal pequeña en o cerca de un cruce se convierte en un rectángulo de un tamaño y orientación apropiados para los algoritmos de detección.
Por lo tanto, la parte de la imagen de vídeo que ha de analizarse se almacena como un bloque de detección. Los 35 datos de vídeo correspondientes al área de interés se transfieren al bloque de detección a través de un mapeo por homografía o deformación (warping como se conoce en la técnica). El bloque de detección representa por lo tanto datos de vídeo del área de interés seleccionada.
Los algoritmos de detección operan con los bloques de detección para identificar si los objetos en movimiento están dentro del área de interés seleccionada. Las operaciones de detección incluyen integración, autocorrelación, 40 centrado de las masas cromáticas, procesamiento del fondo, entre otros para detectar los vehículos en movimiento y/o cualquier presencia de vehículos.
La detección algorítmica de vehículo utilizando las técnicas antes mencionadas consume una gran cantidad de potencia de cálculo computacional. Las máquinas de procesamiento que se encuentran habitualmente en el mercado con amplios rangos de temperatura de funcionamiento están bastante limitadas en lo que respecta a su 45 velocidad máxima de procesamiento. Ejecutar el procesamiento de vídeo necesario para la detección de vehículos puede hacer que tales procesadores trabajen “demasiado calientes”.
Por lo tanto, existe una necesidad de procesamiento de vídeo mejorado que satisfaga unas necesidades de detección avanzadas dentro de una potencia de procesamiento limitada.
Resumen de la invención 50
Se revelan aparatos y métodos que emplean procesamiento de imágenes y que al menos en algunas de las realizaciones abordan las desventajas mencionadas anteriormente del arte previo.
La invención se define mediante las reivindicaciones adjuntas.
Las características y ventajas de la realización descrita anteriormente, además de otras, serán evidentes para los expertos en el arte con referencia a la siguiente descripción detallada y los dibujos adjuntos. 55
Breve descripción de los dibujos
La figura 1 muestra un diagrama de bloque esquemático de un sistema para el procesamiento de imágenes que incluye al menos una realización de la invención;
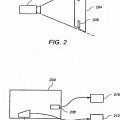
La figura 2 muestra un diagrama esquemático representativo de una cámara y un fotograma de imagen;
La figura 3 muestra una representación de vistas bidimensionales del fotograma de imagen de la figura 3 y los 5 correspondientes bloques de detección;
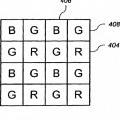
La figura 4 muestra un diagrama de una parte 402 de un fotograma de vídeo en un formato de mosaico;
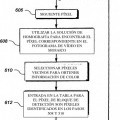
La figura 5 muestra un diagrama de flujo de un grupo a modo de ejemplo de operaciones que pueden utilizarse para generar un bloque de detección a partir de un bloque de vídeo seleccionado de datos de fotogramas de vídeo en formato de mosaico; 10
La figura 6 muestra un diagrama de flujo de una operación a modo de ejemplo que puede utilizarse para generar una tabla de consulta según al menos algunas realizaciones de la invención; y
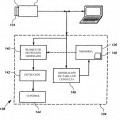
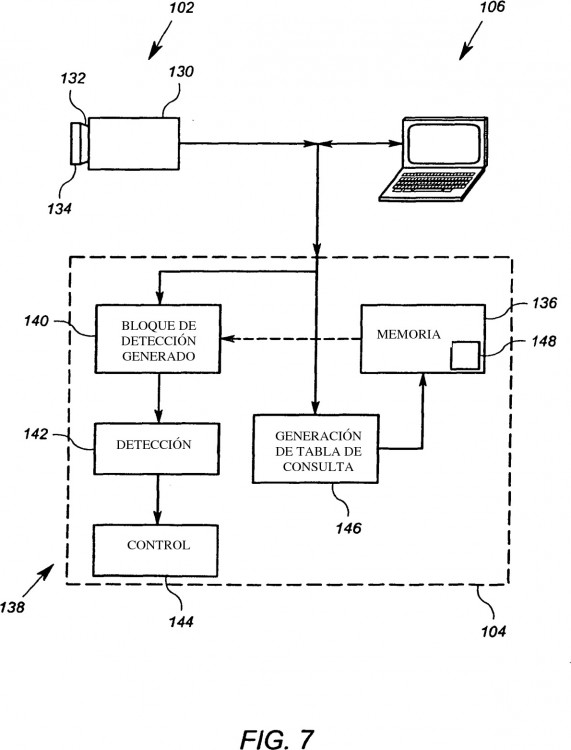
La figura 7 muestra un diagrama de bloque esquemático más detallado de una realización a modo de ejemplo del sistema de procesamiento de imagen de la figura 1.
Descripción detallada 15
La figura 1 muestra un diagrama de bloque de un sistema 100 para el procesamiento de imágenes que incluye al menos una realización de la invención. El sistema 100 incluye una fuente de datos de fotograma de vídeo 102, un sistema de detección de vehículos 104 y al menos una interfaz remota de usuario 106.
La fuente de datos de fotogramas de vídeo 102 es un dispositivo o conjunto de dispositivos configurado para proporcionar datos de fotogramas de vídeo en un primer formato. El primer formato de datos de fotogramas de vídeo 20 incluye una pluralidad de píxeles, cada píxel contiene datos de un solo color. Por ejemplo, la fuente de datos de fotogramas de vídeo 102 es una cámara digital o una cámara de vídeo digital que emplea un CCD (Dispositivo de carga acoplada, por sus siglas en inglés) de alta velocidad o matriz de generación de imágenes CMOS (Semiconductor óxido-metal complementario, por sus siglas en inglés) sensibles a la luz como sensor inicial. Esta matriz produce valores de datos correspondientes a píxeles individuales (pequeños elementos de imagen 25 individuales) de acuerdo a cuánta intensidad de luz se mida en un píxel particular dentro de la matriz de generación de imágenes. Tales dispositivos son conocidos.
El primer formato de los datos de fotograma de vídeo puede comprender de manera apropiada datos en formato de mosaico. En particular, muchas cámaras de vídeo están configuradas para generar datos de píxeles en mosaico, a veces conocidos como datos con formato Bayer. Las cámaras con formato Bayer habitualmente incluyen lentes de 30 mosaico de colores posicionados frente a una matriz de detectores CCD monocromáticos, y transmite el valor de luminancia para cada elemento en lugar de los componentes de colores individuales. La figura 7, que se discute más adelante, muestra una realización a modo de ejemplo que emplea una cámara con lente de mosaico 130.
Tal fuente transmite de manera efectiva sólo un valor de componente... [Seguir leyendo]
Reivindicaciones:
1. Método para detectar un objeto en una imagen, dicho método comprende:
a) capturar la imagen;
b) proporcionar datos de fotograma de vídeo de un solo color de la imagen en un primer formato que incluye datos de píxeles para una pluralidad de píxeles, los datos de píxeles de cada píxel de imagen consisten en datos de un solo color; 5
c) generar datos de píxeles de múltiples colores para cada píxel de un bloque de detección representativo de una parte de imagen que es un subconjunto de los datos de fotograma de vídeo de un solo color y que se asocia por homografía a dicho bloque de detección, en donde los datos de píxeles de múltiples colores de cada píxel del bloque de detección se generan a partir de datos de píxel de un solo color de píxeles de la parte de imagen identificados utilizando dicha asociación homográfica; 10
d) proporcionar los datos de píxeles de múltiples colores del bloque de detección generados a un algoritmo de detección de objetos adaptado para detectar un objeto dentro del bloque de detección.
2. Método conforme a la reivindicación 1, en donde el paso c) también comprende asociar cada píxel del bloque de detección con los datos de píxeles de múltiples píxeles que tienen datos de un solo color representativos de múltiples colores. 15
3. Método conforme a la reivindicación 1, en donde el paso c) también comprende asociar cada píxel del bloque de detección con los datos de píxeles de tres píxeles contiguos del subconjunto de datos de fotograma de vídeo.
4. Método conforme a la reivindicación 1, en donde el paso d) también comprende proporcionar el bloque de detección de modo tal que cada píxel incluye datos de color rojo, verde y azul.
5. Método conforme a la reivindicación 1, que además comprende: 20
e) proporcionar los datos de fotograma de vídeo en el primer formato a un dispositivo informático;
f) emplear el dispositivo informático para interpolar fotogramas de los datos de fotograma de vídeo en el primer formato para generar datos de fotograma de vídeo interpolados.
6. Método conforme a la reivindicación 1, en donde el paso a) también comprende emplear una cámara digital que emplea una lente de mosaico. 25
7. Sistema para la detección de un objeto en una imagen, dicho sistema comprende:
un sistema de cámara configurado para capturar una imagen y proporcionar datos de fotograma de vídeo de un solo color de la imagen en un primer formato que incluye datos de píxel para una pluralidad de píxeles, los datos de píxel consisten en datos de un solo color;
un circuito de procesamiento configurado para 30
generar datos de píxeles de múltiples colores para cada píxel de un bloque de detección representativo de una parte de imagen que es un subconjunto de los datos de fotograma de un solo color y que se asocia por homografía a dicho bloque de detección, en donde los datos de píxeles de múltiples colores de cada píxel del bloque de detección se generan a partir de datos de píxel de un solo color de píxeles de la parte de imagen identificados utilizando dicha asociación homográfica; 35
proporcionar los datos de píxeles de múltiples colores del bloque de detección generados a un algoritmo de detección de objetos adaptado para detectar un objeto dentro del bloque de detección.
8. Sistema conforme a la reivindicación 7, en donde el sistema de cámara también comprende una cámara CCD y una lente de mosaico.
9. Sistema conforme a la reivindicación 7, en donde el circuito de procesamiento también está configurado para 40 relacionar cada píxel del bloque de detección con los datos de píxel de múltiples píxeles que tienen datos de un solo color representativos de múltiples colores.
10. Sistema conforme a la reivindicación 7, en donde el circuito de procesamiento también está configurado para relacionar cada píxel del bloque de detección con los datos de píxeles de tres píxeles contiguos del subconjunto de datos de fotograma de vídeo. 45
Patentes similares o relacionadas:
Dispositivo de procesamiento de imágenes, método de procesamiento de imágenes y programa, del 29 de Julio de 2020, de RAKUTEN, INC: Dispositivo de procesamiento de imágenes, que comprende: medios de obtención de imágenes captadas para la lectura de datos […]
Método y aparato de autentificación de identidad, terminal y servidor, del 29 de Julio de 2020, de Advanced New Technologies Co., Ltd: Un método de autenticación de identidad, en donde el método comprende: adquirir información de rasgos faciales de un usuario y utilizar la información […]
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 2 de Julio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas […]
Cámara inteligente para compartir fotografías automáticamente, del 1 de Julio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para compartir una imagen final utilizando un dispositivo, en el que el procedimiento es realizado por un servidor y comprende: […]
Método, dispositivo de generación de imagen y sistema para generar una medición de autenticidad de un objeto, del 1 de Julio de 2020, de SICPA HOLDING SA: Un método, llevado a cabo por un dispositivo de generación de imagen , para generar una medición de autenticidad de un objeto o para contribuir en la generación […]
Estimación de una postura basada en la silueta, del 24 de Junio de 2020, de VIZRT AG: Un método implementado por ordenador para estimar una postura de un modelo de objeto articulado , en el que el modelo de objeto articulado […]