Sistema y método de medida del desplazamiento transversal de un eje físico giratorio.
Sistema y método de medida del desplazamiento transversal de un eje físico giratorio.
El sistema comprende:
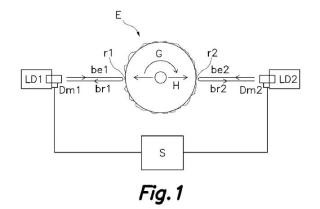
- unos detectores ópticos (Dm1, Dm2) dispuestos para detectar, sin contacto, el acercamiento/alejamiento del eje físico giratorio (E) respecto a dos correspondientes puntos predeterminados; y
- un sistema electrónico (S) en conexión con los detectores ópticos (Dm1, Dm2), y previsto para procesar las señales eléctricas (SDm1, SDm2) provenientes de los mismos con el fin de determinar el desplazamiento transversal del eje físico giratorio (E) y de detectar, discriminando de las mismas, una componente relativa al perfil o forma del eje físico giratorio (E).
El método comprende determinar el desplazamiento transversal del eje físico giratorio (E) y detectar la componente relativa al perfil o forma del mismo.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201132100.
Solicitante: UNIVERSITAT POLITECNICA DE CATALUNYA.
Nacionalidad solicitante: España.
Inventor/es: ROYO ROYO,SANTIAGO, URRESTY BETANCOURT,Julio Cesar, RIBA RUIZ,Jordi Roger, ATASHKHOOEI,Reza.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/27 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para ensayar la alineación de ejes.
- G01D5/26 G01 […] › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que utilizan medios ópticos, p. ej. que utilizan luz infrarroja, visible o ultravioleta.
Fragmento de la descripción:
Sistema y método de medida del desplazamiento transversal de un eje físico giratorio Sector de la técnica La presente invención concierne, en un primer aspecto, a un sistema de medida del desplazamiento transversal de un eje físico giratorio, que se produce en un sentido transversal a su eje geométrico de giro, configurado para realizar tal medida sin contacto mediante una técnica óptica, y más particularmente a un sistema configurado para determinar el desplazamiento transversal del eje físico giratorio detectando y
teniendo en cuenta una componente relativa al perfil o forma del eje físico. Un segundo aspecto de la invención concierne a un método de medida del desplazamiento transversal de un eje físico giratorio, en un sentido transversal a su eje geométrico de giro, que comprende determinar el desplazamiento transversal del eje físico giratorio detectando y teniendo en cuenta una componente relativa al perfil o forma del eje físico. La invención es particularmente aplicable a ejes físicos de rotores de motores o generadores.
Estado de la técnica anterior
Un motor o generador eléctrico consta básicamente de dos partes principales: el estator y el rotor. El objetivo del motor o generador es hacer que el rotor gire, lo que a su vez hará girar al eje físico del motor o generador. El funcionamiento del motor o generador se basa en el principio electromagnético, en una forma en la que el campo magnético del estator gira, y en consecuencia el rotor se ve obligado a girar con él.
Si se produce un cortocircuito en las bobinas del estator o existe alguna clase de falta de uniformidad y/o defectos en los imanes del rotor o el estator, entonces la fuerza aplicada sobre el rotor puede provocar que, mientras el rotor gira, se produzca también un desplazamiento no giratorio del eje geométrico, y por tanto del eje físico, del rotor del motor o generador, en un sentido transversal al eje.
Son conocidos diversos sistemas concebidos para medir tales desplazamientos no giratorios, denominados en adelante como desplazamientos transversales, del eje del rotor de un motor o generador, y en general del eje giratorio de cualquier otra clase de máquina o sistema mecánico o eléctrico donde tal desplazamiento transversal se desee medir. Algunos de tales sistemas se citan a continuación.
La patente US6782766B2 propone detectar diferentes desplazamientos de un eje, incluyendo desalineación y localización axial, que se lleva a cabo mediante ladisposición de una pluralidad de elementos detectables sobre el eje para su detección mediante una pluralidad de sensores, tales como sensores ópticos, dispuestos en diferentes ubicaciones alrededor del eje que detectan su presencia cuando los elementos detectables quedan enfrentados a los sensores.
No se propone en US6782766B2 realizar otra detección entre cada sensor y elemento detectable que no sea la relativa a la presencia del elemento detectable, no proponiéndose realizar una detección de la variación en la distancia de alejamiento/acercamiento entre un elemento detectable y un correspondiente sensor, o en relación a otro punto predeterminado.
La patente US5448060 propone disponer dos o más sensores, por ejemplo unos fotodetectores, en diferentes ubicaciones angulares respecto a un eje, con el fin de determinar el desplazamiento transversal del eje. En este caso los sensores detectan el giro del eje en diferentes puntos, y analizando la información de los dos (o más) sensores se determina este desplazamiento transversal.
Otros de tales sistemas utilizan la técnica de interferometría láser por automezclado (SMI: Self-Mixing Interferometr y ) , la cual es una técnica óptica que permite realizar tales medidas, mientras el eje está girando, sin contacto. La resolución de la medida realizada con estos sistemas es la resolución básica ofrecida por esta técnica que no es otra que la mitad de la longitud de onda del haz laser, que típicamente es de 392 nm nominales. Los sistemas de medida convencionales SMI utilizados para la detección del desplazamiento transversal de un eje físico giratorio, comprenden: -un solo detector óptico dispuesto para detectar, sin contacto, el acercamiento/alejamiento del eje físico giratorio respecto a un punto predeterminado, 25 causado por el desplazamiento transversal del mismo cuando éste está girando; y
-un sistema electrónico en conexión con el detector óptico para recibir del mismo unas señales eléctricas representativas de los valores de alejamiento/acercamiento detectados, y previsto para procesar dichas señales eléctricas con el fin de determinar el desplazamiento transversal del eje físico giratorio.
La principal fuente de error en las medidas de desplazamiento llevadas a cabo mediante SMI, que afectan a la precisión de la medida, es debida a que la superficie circunferencial exterior del eje físico giratorio donde el haz láser incide con el fin de medir su desplazamiento, tiene cierta rugosidad (no medida por el haz láser debido al tamaño del punto focal del haz) y ciertas desviaciones de forma. Por tanto, las medidas realizadas con los sistemas SMI del estado de la técnica incluyen una variación aleatoria de altura o distancia, respecto al diodo láser emisor del haz, que se añade a la del desplazamiento transversal que se pretende medir.
Tal fuente de error principal provocada por la rugosidad y/o desviaciones de forma de la superficie circunferencial exterior del eje físico giratorio también afecta a las 5 medidas realizadas con otros sistemas de medida que utilizan medios ópticos con técnicas distintas a la SMI.
En ninguna de las patentes citadas anteriormente se menciona la referida fuente de error principal, ni se propone por tanto ninguna solución para superar los problemas que la misma ocasiona en cuanto a la precisión de las medidas obtenidas.
Explicación de la invención Aparece necesario ofrecer una alternativa al estado de la técnica que cubra las lagunas halladas en el mismo, y que en particular proporcione una solución al problema técnico objetivo que provoca la referida anteriormente como fuente de error principal
provocada por las irregularidades y/o desviaciones de forma de la superficie circunferencial exterior del eje físico giratorio. Con tal fin, la presente invención proporciona, en un primer aspecto, un sistema de medida del desplazamiento transversal de un eje físico giratorio, que se produce en un sentido transversal a su eje geométrico de giro, donde el sistema de medida comprende, de manera en sí conocida:
-un detector óptico dispuesto para detectar, sin contacto, el acercamiento/alejamiento de dicho eje físico giratorio respecto a un punto predeterminado, causado por el desplazamiento transversal del mismo cuando éste está girando; y
- un sistema electrónico en conexión con dicho detector óptico para al menos recibir del mismo unas señales eléctricas representativas de los valores de alejamiento/acercamiento detectados, y previsto para procesar dichas señales eléctricas con el fin de determinar el desplazamiento transversal del eje físico giratorio.
A diferencia de los sistemas de medida del estado de la técnica, en el propuesto 30 por el primer aspecto de la presente invención:
-el mencionado detector óptico es un primer detector óptico, dicho punto predeterminado es un primer punto y dichas señales eléctricas son unas primeras señales eléctricas,
- el sistema de medida comprende un segundo detector óptico dispuesto para 35 detectar, sin contacto, el acercamiento/alejamiento del eje físico giratorio respecto a un segundo punto predeterminado, causado por el desplazamiento transversal del mismo cuando éste está girando,
-y el sistema electrónico está en conexión con el segundo detector óptico para como mínimo recibir del mismo unas segundas señales eléctricas representativas de los
valores de alejamiento/acercamiento detectados, y está previsto para procesar, en combinación, las primeras y las segundas señales eléctricas para detectar, discriminando de las mismas, una componente relativa al perfil o forma del eje físico giratorio, y para determinar el desplazamiento transversal del eje físico giratorio.
Para un ejemplo de realización el sistema electrónico está previsto para indicar
la precisión de la medida del desplazamiento transversal del eje físico giratorio en función del valor de dicha componente relativa al perfil o forma del eje físico giratorio detectada o de un parámetro asociado a la misma. Para otro ejemplo de realización, alternativo o complementario al del párrafo anterior, el sistema electrónico está previsto para eliminar por procesado, de las primeras y/o segundas señales eléctricas,...
Reivindicaciones:
1. Sistema de medida del desplazamiento transversal de un eje físico giratorio, que se produce en un sentido transversal a su eje geométrico de giro, donde el sistema 5 de medida comprende:
- un detector óptico (Dm1) configurado y dispuesto para detectar, sin contacto, variaciones de luz provocadas por el acercamiento/alejamiento de dicho eje físico giratorio (E) respecto a un punto predeterminado, causado por el desplazamiento transversal del mismo cuando éste está girando, y generar, en consecuencia, unas
señales eléctricas de salida correspondientes a la distancia existente entre la superficie del eje físico giratorio (E) y dicho punto predeterminado, en una pluralidad de instantes temporales; y
- un sistema electrónico (S) en conexión con dicho detector óptico (Dm1) para al menos recibir del mismo dichas señales eléctricas, y previsto para procesar, mediante
unos medios de procesamiento de señales eléctricas, dichas señales eléctricas con el fin de determinar el desplazamiento transversal del eje físico giratorio (E) ; estando dicho sistema de medida caracterizado porque:
- dicho detector óptico (Dm1) es un primer detector óptico, dicho punto
predeterminado es un primer punto y dichas señales eléctricas son unas primeras 20 señales eléctricas (SDm1) ,
- el sistema de medida comprende un segundo detector óptico (Dm2) configurado y dispuesto para detectar, sin contacto, variaciones de luz provocadas por el acercamiento/alejamiento de dicho eje físico giratorio (E) respecto a un segundo punto predeterminado, causado por el desplazamiento transversal del mismo cuando
éste está girando, y generar, en consecuencia, unas segundas señales eléctricas de salida correspondientes a la distancia existente entre la superficie del eje físico giratorio (E) y dicho segundo punto predeterminado, en una pluralidad de instantes temporales;
-y porque dicho sistema electrónico (S) está en conexión con dicho segundo detector óptico (Dm2) para al menos recibir del mismo dichas segundas señales 30 eléctricas (SDm2) , y previsto para procesar, en combinación, mediante dichos medios de procesamiento de señales eléctricas que operan implementando el método según la reivindicación 10, dichas primeras (SDm1) y dichas segundas (SDm2) señales eléctricas para detectar, discriminando de las mismas, una componente relativa al perfil o forma del eje físico giratorio (E) , y para determinar el desplazamiento transversal del eje físico
giratorio (E) .
2. Sistema de medida según la reivindicación 1, caracterizado porque el sistema electrónico (S) está previsto para, mediante la ejecución de dicho algoritmo para implementar las etapas del método según la reivindicación 11, obtener e indicar la precisión de la medida del desplazamiento transversal del eje físico giratorio (E) en función del valor de dicha componente relativa al perfil o forma del eje físico giratorio (E) detectada o de un parámetro asociado a la misma denominado incertidumbre y cuyo valor se obtiene dividiendo por dos el valor de la componente detectada.
3. Sistema de medida según la reivindicación 1 ó 2, caracterizado porque el sistema electrónico (S) está previsto para eliminar por procesado, de dichas primeras (SDm1) y/o segundas (SDm2) señales eléctricas, dicha componente relativa al perfil o forma del eje físico giratorio (E) o un parámetro asociado a la misma, o incertidumbre, cuyo valor se obtiene dividiendo por dos el valor de la componente detectada, para determinar el desplazamiento transversal del eje físico giratorio (E) de manera más precisa.
1.
4. Sistema de medida según la reivindicación 1, 2 ó 3, caracterizado porque dicho eje físico giratorio (E) es un eje físico de un rotor de un motor o generador.
5. Sistema de medida según una cualquiera de las reivindicaciones 1 a 4, caracterizado porque es un sistema de medida de interferometría láser por automezclado, que comprende un primer (LD1) y un segundo (LD2) diodos láser de cavidad 20 resonante dispuestos respectivamente en dichos primer y segundo puntos predeterminados para emitir sendos haces de luz (be1, be2) perpendicularmente, o sustancialmente en perpendicular, sobre unas respectivas primera (r1) y segunda (r2) regiones de la superficie circunferencial exterior, al menos parcialmente reflectante, del eje físico giratorio (E) y recibir, en el interior de sus cavidades resonantes, la luz 25 reflejada (br1, br2) en el eje físico giratorio (E) , estando dichos primer (Dm1) y segundo (Dm2) detectores ópticos dispuestos y configurados para detectar las variaciones provocadas, en los haces emitidos (be1, be2) y/o en la luz del interior de las cavidades resonantes, por la entrada de dicha luz reflejada (br1, br2) en las cavidades resonantes.
6. Sistema de medida según una cualquiera de las reivindicaciones anteriores, 30 caracterizado porque dichos primer y segundo puntos predeterminados se encuentran alineados o sustancialmente alineados entre sí, produciéndose en una misma dirección (H) dicho desplazamiento transversal determinado y dicho acercamiento/alejamiento del eje físico giratorio (E) para ambos puntos predeterminados.
7. Sistema de medida según una cualquiera de las reivindicaciones 1 a 5,
caracterizado porque dichos primer y segundo puntos predeterminados se encuentran distanciados angularmente entre sí un ángulo menor que 180º, tomando como vértice del ángulo el centro geométrico del eje físico giratorio (E) , produciéndose dicha determinación del desplazamiento transversal del eje físico giratorio (E) para dos direcciones: una primera dirección (H) en la que se produce dicho acercamiento/alejamiento del eje físico giratorio (E) respecto al primer punto predeterminado y una segunda dirección (V) en la que se produce el acercamiento/alejamiento del eje físico giratorio (E) respecto al segundo punto predeterminado.
8. Sistema de medida según la reivindicación 7, caracterizado porque dicho ángulo menor que 180º es igual a 90º o a sustancialmente 90º.
1.
9. Sistema de medida según la reivindicación 6, caracterizado porque dicha dirección (H) es una primera dirección y porque comprende al menos un tercer detector óptico (Dm3) dispuesto para detectar, sin contacto, variaciones de luz provocadas por el acercamiento/alejamiento del eje físico giratorio (E) respecto a un tercer punto predeterminado, causado por el desplazamiento transversal del mismo en una segunda dirección (V) cuando éste está girando, y generar, en consecuencia, unas terceras señales eléctricas de salida correspondientes a la distancia existente entre la superficie del eje físico giratorio (E) y dicho tercer punto predeterminado, en una pluralidad de instantes temporales, estando el sistema electrónico (S) en conexión con dicho tercer detector óptico (Dm3) para al menos recibir del mismo dichas terceras señales eléctricas representativas de los valores de alejamiento/acercamiento detectados, y previsto para procesar, mediante la ejecución en dichos medios de procesamiento de las etapas del método según la reivindicación 19, dichas terceras señales eléctricas con el fin de determinar el desplazamiento transversal del eje físico giratorio (E) en dicha segunda dirección (V) .
2.
10. Método de medida del desplazamiento transversal de un eje físico giratorio, que se produce en un sentido transversal a su eje geométrico de giro, que comprende:
-detectar mediante un detector óptico (Dm1) , sin contacto, unos valores de acercamiento/alejamiento de dicho eje físico giratorio (E) respecto a un punto predeterminado, causado por el desplazamiento transversal del mismo cuando éste
está girando, mediante la obtención de unas señales eléctricas de salida de dicho detector óptico (Dm1) correspondientes a la distancia existente entre la superficie del eje físico giratorio (E) y dicho punto predeterminado, en una pluralidad de instantes temporales; y
- determinar el desplazamiento transversal del eje físico giratorio (E) mediante la
observación de la evolución temporal de dichas señales eléctricas de salida de dicho detector óptico (Dm1) ;
estando dicho método de medida caracterizado porque dicho detector óptico (Dm1) es un primer detector óptico, dicho punto predeterminado es un primer punto y dichas señales eléctricas son unas primeras señales eléctricas (SDm1) , y el método comprende:
- detectar mediante un segundo detector óptico (Dm2) , sin contacto, unos
valores de acercamiento/alejamiento de dicho eje físico giratorio (E) respecto a un segundo punto predeterminado, causado por el desplazamiento transversal del mismo cuando éste está girando, mediante la obtención de unas señales eléctricas de salida de dicho segundo detector óptico (Dm2) , o segundas señales eléctricas (SDm2) representativas de los valores de alejamiento/acercamiento detectados, correspondientes a la distancia existente entre la superficie del eje físico giratorio (E) y dicho segundo punto predeterminado, en una pluralidad de instantes temporales; y
- procesar, en combinación, dichas primeras (SDm1) y dichas segundas (SDm2) señales eléctricas para:
- detectar, discriminando de las mismas, una componente relativa al perfil o forma del eje físico giratorio (E) , donde dicho procesamiento comprende:
-si las primeras (SDm1) y segundas (SDm2) señales eléctricas están desfasadas 180º, sumarlas entre sí o aplicar a al
menos una de ellas un desfase que provoque que las mismas estén en fase y, entonces, restarlas entre sí; o
-si las primeras (SDm1) y segundas (SDm2) señales eléctricas no están desfasadas 180º, aplicar a al menos una de ellas un desfase que provoque que las mismas estén
desfasadas 180º y, entonces, sumarlas entre sí, o un desfase que provoque que las mismas estén en fase y, entonces, restarlas entre sí;
- y para determinar el desplazamiento transversal del eje físico giratorio (E) , donde dicho procesamiento comprende al menos la 30 observación de la evolución temporal de la primera (SDm1) y/o la segunda (SDm2) señales eléctricas.
11. Método de medida según la reivindicación 10, caracterizado porque comprende indicar la precisión de la medida del desplazamiento transversal del eje físico giratorio (E) , obteniéndose dicha indicación en función del valor de dicha componente relativa al perfil o forma del eje físico giratorio (E) detectada o de un parámetro asociado a la misma, o incertidumbre, cuyo valor se obtiene dividiendo por dos el valor de la componente detectada.
12. Método de medida según la reivindicación 10 u 11, caracterizado porque dicho procesamiento para determinar el desplazamiento transversal del eje físico giratorio (E) comprende realizar dicha determinación de manera más precisa mediante la eliminación como parte de dicho procesamiento, en dichas primeras (SDm1) y/o segundas (SDm2) señales eléctricas de dicha componente relativa al perfil o forma del eje físico giratorio (E) detectada o de un parámetro asociado a la misma, o incertidumbre, cuyo valor se obtiene dividiendo por dos el valor de la componente detectada.
13. Método según la reivindicación 12, caracterizado porque dicho eje físico giratorio (E) es un eje físico de un rotor de un motor o generador.
14. Método de medida según la reivindicación 12 ó 13, caracterizado porque es un método de medida de interferometría láser por auto-mezclado, que comprende:
- emitir sendos haces de luz (be1, be2) perpendicularmente, o sustancialmente en perpendicular, sobre unas respectivas primera (r1) y segunda (r2) regiones de la superficie circunferencial exterior, al menos parcialmente reflectante, de dicho eje físico giratorio (E) , mediante un primer (LD1) y un segundo (LD2) diodos láser de cavidad resonante dispuestos respectivamente en dichos primer y segundo puntos predeterminados;
- recibir, en el interior de las cavidades resonantes de dichos primer (LD1) y segundo (LD2) diodos láser, la luz reflejada (br1, br2) en el eje físico giratorio (E) , lo cual provoca que se produzca una variación tanto en la luz generada en el interior de las cavidades resonantes de los primer (LD1) y segundo (LD2) diodos láser como,
como consecuencia de dicha variación, una correspondiente variación en los haces de luz emitidos (be1, be2) ; y
- detectar, mediante dichos primer (Dm1) y segundo (Dm2) detectores ópticos, dichas variaciones provocadas en los haces de luz emitidos (be1, be2) y/o en la luz del interior de dichas cavidades resonantes, estando los primer (Dm1) y segundo (Dm2)
detectores ópticos dispuestos y configurados para detectar dichas variaciones y generar, en consecuencia, dichas señales eléctricas de salida ( (SDm2, SDm2) .
15. Método de medida según una cualquiera de las reivindicaciones 12 a 14, caracterizado porque dichos primer y segundo puntos predeterminados se encuentran alineados o sustancialmente alineados entre sí, produciéndose en una misma dirección (H) dicho desplazamiento transversal determinado y dicho acercamiento/alejamiento del eje físico giratorio (E) para ambos puntos predeterminados.
16. Método de medida según la reivindicación 15, caracterizado porque dicho procesado comprende sumar las primeras (SDm1) y segunda (SDm2) señales eléctricas, que son de signo opuesto, para obtener como resultado una señal que incluye únicamente o sustancialmente solo dicha componente relativa al perfil o forma del eje físico giratorio (E) .
17. Método de medida según una cualquiera de las reivindicaciones 12 a 14, caracterizado porque dichos primer y segundo puntos predeterminados se encuentran distanciados angularmente entre sí un ángulo menor que 180º, tomando como vértice del ángulo el centro geométrico del eje físico giratorio (E) , comprendiendo el método realizar dicha determinación del desplazamiento transversal del eje físico giratorio (E) para dos direcciones: una primera dirección (H) en la que se produce dicho acercamiento/alejamiento del eje físico giratorio (E) respecto al primer punto predeterminado y una segunda dirección (V) en la que se produce el acercamiento/alejamiento del eje físico giratorio (E) respecto al segundo punto predeterminado.
18. Método de medida según la reivindicación 17, caracterizado porque dicho ángulo menor que 180º es igual a 90º o a sustancialmente 90º.
19. Método de medida según la reivindicación 15, caracterizado porque dicha dirección (H) es una primera dirección y porque el método comprende:
- detectar mediante un tercer detector óptico (Dm3) , sin contacto, unos valores de acercamiento/alejamiento de dicho eje físico giratorio (E) respecto a un tercer punto predeterminado, causado por el desplazamiento transversal del mismo en una segunda dirección (V) cuando éste está girando, mediante la obtención de unas señales eléctricas de salida de dicho tercer detector óptico (Dm3) , o terceras señales eléctricas representativas de los valores de acercamiento/alejamiento detectados, correspondientes a la distancia existente entre la superficie del eje físico giratorio (E) y dicho tercer punto predeterminado, en una pluralidad de instantes temporales; y
- procesar dichas terceras señales eléctricas para determinar el desplazamiento transversal del eje físico giratorio (E) en dicha segunda dirección (V) , donde dicho 30 procesamiento comprende al menos la observación de la evolución temporal de la tercera señal eléctrica.
20. Método de medida según la reivindicación 14 o una cualquiera de las reivindicaciones 15 a 19 cuando dependen de la 14, caracterizado porque el método comprende detectar, en las primeras (SDm1) y segundas (SDm2) señales eléctricas, una componente indeseada relativa al desplazamiento giratorio (G) del eje físico giratorio (E) , provocada debido a que dichos haces de luz emitidos (be1, be2) inciden sobre la superficie circunferencial exterior del eje físico giratorio (E) de manera tal que si se extendiesen más allá de dicha superficie circunferencial exterior no se cruzarían con el eje geométrico de rotación del eje físico giratorio (E) , y eliminarla de las primeras (SDm1) y segundas (SDm2) señales eléctricas, comprendiendo detectar dicha componente 5 indeseada estimando la velocidad media con la que se incrementa de manera constante la onda periódica amplitud versus tiempo de las primeras (SDm1) o segundas (SDm2) señales eléctricas, considerando que dicha componente indeseada es una recta creciente con una pendiente igual a dicha velocidad media, y llevar a cabo dicha eliminación restando de las primeras (SDm1) o segundas (SDm2) señales eléctricas dicha recta creciente.
Patentes similares o relacionadas:
Sensor de fibra óptica de iluminación, multi paramétrico y con múltiples puntos sensores, del 8 de Abril de 2020, de Egalon, Claudio Oliveira: Un sistema de detección que comprende: una fibra óptica sensible , que tiene un primer y un segundo terminal, que tiene un núcleo , […]
Conjunto de alta tensión y procedimiento para la detección de descargas parciales en conjuntos de alta tensión, del 11 de Marzo de 2020, de BAM BUNDESANSTALT FUR MATERIALFORSCHUNG UND -PRUFUNG: Conjunto de alta tensión para el alojamiento de un cable de alta tensión con un conductor configurado para conducir […]
Captador de presión óptico con menos tensiones mecánicas, del 4 de Marzo de 2020, de Opsens Solutions Inc: Sensor óptico de presión , que comprende: - una envolvente del sensor; - una celda óptica de presión de interferómetro de Fabry-Perot montada en el interior […]
Sensor interferométrico de bucle cerrado que utiliza una ganancia de bucle para determinar el contraste de interferencia, del 25 de Octubre de 2019, de ABB SCHWEIZ AG: Un método para medir un contraste de interferencia (A) en un dispositivo sensor óptico de modulación de fase, en bucle cerrado, basado en interferencias, comprendiendo […]
Dispositivo de medición angular y método para el funcionamiento de un dispositivo de medición angular, del 14 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición angular, que abarca • una carcasa , • una unidad de registro de posiciones para la generación de […]
Transmisión de informaciones y de energía entre un sensor móvil y un elemento fijo, del 7 de Agosto de 2019, de Bia: Equipo que comprende un elemento fijo, un elemento móvil, un sensor de medida física solidario con el elemento móvil y un enlace […]
 Dispositivo de alta tensión y procedimiento para monitorear procesos de envejecimiento de un aislamiento en un dispositivo de alta tensión, del 31 de Julio de 2019, de BAM BUNDESANSTALT FUR MATERIALFORSCHUNG UND -PRUFUNG: Procedimiento para monitorear procesos de envejecimiento de un aislamiento en un dispositivo de alta tensión (100, 101, 102, 103, […]
Dispositivo de alta tensión y procedimiento para monitorear procesos de envejecimiento de un aislamiento en un dispositivo de alta tensión, del 31 de Julio de 2019, de BAM BUNDESANSTALT FUR MATERIALFORSCHUNG UND -PRUFUNG: Procedimiento para monitorear procesos de envejecimiento de un aislamiento en un dispositivo de alta tensión (100, 101, 102, 103, […]
Dispositivo de medición de posición, del 22 de Mayo de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición, que comprende un patrón de medida y una unidad de escaneo , que se dispusieron con movimiento relativo entre […]