SISTEMA Y METODO PARA CONTROLAR UN MOTOR ELECTRICO SINCRONICO, PARTICULARMENTE PARA APARATOS ELECTRODOMESTICOS.
Sistema de control (ECS) para un motor eléctrico sincrónico (M) que comprende un estator (S) con al menos un devanado (W) y un rotor (R) con imanes permanentes;
comprendiendo el sistema (ECS):
un circuito rectificador (RC) con una entrada (2) que está diseñada para conectarse a una fuente de alimentación de corriente alterna, para suministrar como salida una tensión de corriente continua predeterminada (VB);
un circuito de excitación (DC), que está conectado a la salida del circuito rectificador (RC) y al devanado del estator (W), e incluye una pluralidad de conmutadores controlados (SW1-SW4) que están dispuestos para permitir el paso de una corriente hacia el devanado del estator (W) selectivamente en un sentido y en el sentido opuesto;
medios de detección de posición (PS) para suministrar una señal de posición alterna (H) que es indicativa de la posición angular del rotor (R); y
un circuito de control (CC) con una primera entrada que está diseñada para recibir una señal (RS) indicativa de la velocidad de rotación requerida (?ref) para el motor (M), y una segunda entrada que está conectada a dichos medios de detección de posición (PS); estando diseñado el circuito de control para:
- controlar el circuito de excitación (DC) cuando se arranca el motor (M), basándose en la señal de posición (H) del rotor, y para aplicar al devanado del estator (W) una tensión con un valor absoluto que se reduce en una cantidad predeterminada (dcmin) en comparación con la tensión de salida (VB) del circuito rectificador (RC);
- a continuación, a partir de la transición del rotor (R) a una posición angular predeterminada, generar una señal de contaje (N) que varía según una función lineal del tiempo (t) y reinicializar esta señal de contaje (N) cuando alcanza un valor de referencia predeterminado (Nref) correspondiente a la velocidad de rotación requerida (?ref) para el motor (M);
- a continuación controlar el circuito de excitación (DC) selectivamente basándose en la señal de posición (H) del rotor o basándose en dicha señal de contaje (N), cuando la velocidad de rotación (?) del motor (M) es respectivamente inferior y superior a la velocidad requerida (?ref); y
- controlar el circuito de excitación (DC) para aplicar al devanado del estator (W) una tensión, cuyo valor absoluto aumenta así según una función predeterminada cuando la velocidad de rotación (?) del rotor (R) aumenta hasta un valor predeterminado
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2006/052528.
Solicitante: ASKOLL P&C S.R.L.
Nacionalidad solicitante: Italia.
Dirección: VIA VITTIME DEL VAJONT 29/31/33,10024 MONCALIERI (TO).
Inventor/es: ACQUAVIVA, SEBASTIANO.
Fecha de Publicación: .
Fecha Concesión Europea: 2 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- H02P6/06 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › Disposiciones para la regulación de la velocidad de un solo motor en el que la velocidad del motor es medida y comparada con un valor físico dado para ajustar la velocidad del motor.
- H02P6/08B
- H02P6/20C
Clasificación PCT:
- H02P6/06 H02P 6/00 […] › Disposiciones para la regulación de la velocidad de un solo motor en el que la velocidad del motor es medida y comparada con un valor físico dado para ajustar la velocidad del motor.
- H02P6/08 H02P 6/00 […] › Disposiciones para el control de la velocidad o el par de un solo motor (H02P 6/10, H02P 6/28 tienen proridad).
- H02P6/20 H02P 6/00 […] › Disposiciones para el arranque (H02P 6/08 tiene prioridad).
Fragmento de la descripción:
Sistema y método para controlar un motor eléctrico sincrónico, particularmente para aparatos electrodomésticos.
La presente invención se refiere a un sistema y a un método para controlar un motor eléctrico sincrónico, que puede usarse, en particular, en aparatos electrodomésticos, por ejemplo para el accionamiento de una bomba hidráulica en una máquina lavavajillas.
Las bombas de lavado de una máquina lavavajillas se accionan normalmente mediante un motor eléctrico de tipo sincrónico, por ejemplo del tipo descrito en la patente europea EP 0 207 430-B1 y en la patente europea EP 0 287 984 B1. Una bomba de lavado hidráulica de este tipo para lavavajillas en funcionamiento tiene una carga hidráulica que normalmente varía de manera cíclica. Por consiguiente, la bomba tiene un funcionamiento de tipo pulsado y esto implica la generación de ruido y tensiones sustanciales en la bomba.
Un objeto de la presente invención es proponer un sistema y un método para controlar un motor eléctrico sincrónico que haga posible eliminar los inconvenientes descritos anteriormente.
Estos objetos y otros según la invención se consiguen mediante un sistema de control, cuyas características principales se definen en la reivindicación 1 adjunta, y usando un método de control según la reivindicación 6.
Características y ventajas adicionales de la invención serán evidentes a partir de la siguiente descripción detallada proporcionada meramente a modo de ejemplo no limitativo, con referencia a los dibujos adjuntos, en los que:
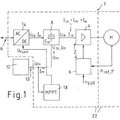
la figura 1 es una representación de un motor eléctrico sincrónico con el que está asociado un sistema de control según la presente invención;
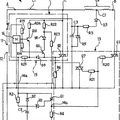
la figura 2 es un diagrama de conexiones de cable más detallado del sistema de control según la figura 1;
las figuras 3 y 4 son diagramas que, según el tiempo t registrado en el eje x, tienen desarrollos que ejemplifican señales generadas en el sistema de control según la invención; y
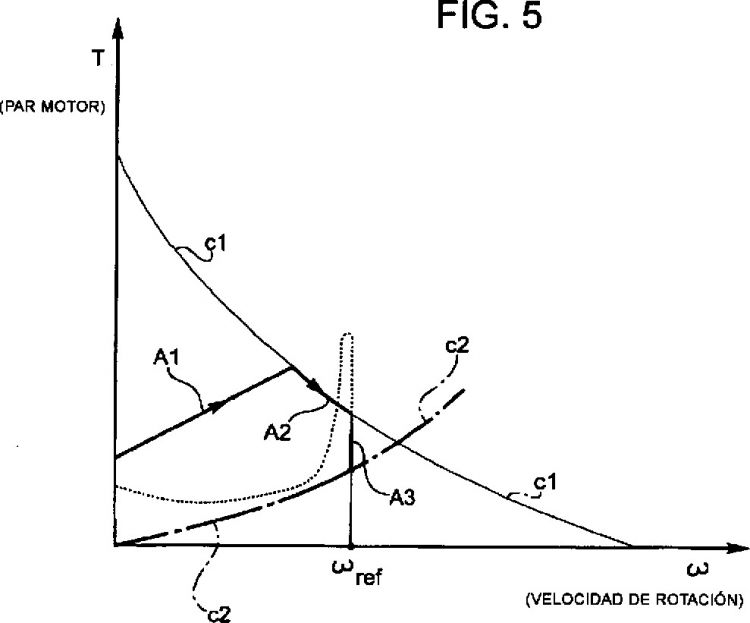
la figura 5 es un diagrama que ilustra la característica de funcionamiento de un motor eléctrico con el que está asociado un sistema de control según la presente invención.
En la figura 1, M indica en conjunto un motor eléctrico con el que está asociado un sistema de control electrónico indicado como ECS en conjunto.
El motor eléctrico M comprende un estator S, que incluye un conjunto de láminas 1 sustancialmente en forma de "U", dotado de un devanado W y un rotor R con imanes permanentes.
El sistema de control ECS que está asociado con el motor M comprende un sensor de posición eléctrico PS asociado con el rotor R. Este sensor es por ejemplo un sensor de efecto Hall, que en funcionamiento puede suministrar a un sensor de posición eléctrico alterno, normalmente con una onda cuadrada, que por ejemplo tiene un desarrollo según las formas de onda indicadas con H en las figuras 3 y 4.
El sensor PS está dispuesto en una posición de modo que la señal H que suministra a la salida tiene conmutación de nivel, por ejemplo de nivel bajo a nivel alto, cuando el rotor va a una posición de referencia angular predeterminada.
Con referencia a la figura 1, el sistema de control ECS comprende adicionalmente un circuito rectificador RC, por ejemplo de tipo de media onda y doble puente, con una entrada 2 que está diseñada para conectarse a una fuente de alimentación de corriente alterna, tal como la red a 50 ó 60 Hz, para suministrar una tensión de corriente continua predeterminada VB como salida.
El sistema de control ECS comprende adicionalmente un circuito de excitación DC, que, como se muestra en la figura 2, es ventajosamente del tipo denominado en puente en "H". Este circuito de control está conectado a la salida del circuito rectificador RC, así como al devanado del estator W, e incluye una pluralidad de conmutadores electrónicos controlados SW1-SW4, tal como, por ejemplo, transistores de tipo MOSFET. La disposición y el control de dichos conmutadores SW1-SW4 son de modo que pueden permitir el paso de una corriente hacia el interior del devanado del estator W selectivamente en un sentido y en el sentido opuesto.
Los conmutadores SW1-SW4 tienen entradas de control respectivas i1-i4 que están conectadas a las salidas de un circuito de control que se indica como CC en conjunto en las figuras 1 y 2.
En la realización ilustrada a modo de ejemplo en la figura 2, el circuito de control CC tiene una entrada I que está diseñada para recibir una señal RS que es indicativa de la velocidad de rotación ?ref requerida para el motor M.
El circuito de control CC comprende un primer circuito de procesamiento PC1, que recibe como entrada la señal RS, y suministra como salida una señal T1, cuya frecuencia (periodo) es proporcional (inversamente proporcional) a la velocidad ?ref requerida para el motor M.
El circuito de control CC comprende un segundo circuito de procesamiento PC2 que tiene dos entradas, a las que se aplica en funcionamiento la señal de posición del rotor H y la señal T1 que es indicativa de la velocidad de rotación ?ref requerida para el motor M.
El circuito de procesamiento PC2 está diseñado para proporcionar como salida dos señales, indicadas respectivamente con H' y PWMS en la figura 2, que se aplican a las entradas de un circuito lógico LC de tipo Y.
Como será más evidente a continuación en el presente documento, la señal H' es una señal de onda cuadrada, usada para controlar los conmutadores SW1-SW4 del circuito de excitación en puente DC.
La señal PWMS es una señal con un ancho (duración) de pulso modulado y se usa para controlar el valor absoluto de la tensión aplicada en funcionamiento al devanado del estator W.
La salida del circuito lógico LC está conectada a las entradas de control i1 e i4 de los conmutadores SW1 y SW4 a través de un inversor lógico LI; esta salida también está conectada directamente a las entradas de control i2 e i3 de los conmutadores SW2 y SW3.
El sistema de control ECS descrito anteriormente funciona sustancialmente de la siguiente manera.
Cuando se arranca el motor eléctrico M, y hasta que tiene lugar la primera conmutación de nivel de la señal H suministrada por el sensor de posición PS, el circuito de procesamiento PC2 suministra como salida una señal H' igual a H, es decir controla el estator W del motor M (a través de los circuitos LC, LI y el circuito en puente DC), basándose en la señal suministrada por el sensor de posición PS asociado con el rotor. Además, el circuito PC2 suministra como salida una señal PWMS, que tiene un ciclo de trabajo con un valor predeterminado dcmin, de modo que la tensión aplicada al devanado del estator W es sustancialmente igual al producto VB x dcmin, donde VB es la tensión de salida del circuito rectificador RC.
Estas condiciones siguen aplicándose hasta que tiene lugar la primera conmutación de nivel de la señal H del sensor de posición PS asociado con el rotor.
Cuando tiene lugar la primera conmutación de la señal H (instante t1 en la figura 3), un contador C dentro del circuito PC2 (figura 2) empieza a contar, que por ejemplo es incremental, y varía de forma lineal con el tiempo t, hasta que el valor contado N alcanza un valor Nref que es inversamente proporcional a la velocidad ?ref requerida para el motor M.
Cuando el valor de contaje N alcanzado por el contador C es igual al valor umbral Nref (figura 3), si la señal H todavía no ha cambiado de estado o nivel, el contador C se reinicializa a cero (instante t2 en la figura 3). El contaje mediante el contador C se reinicializa entonces una vez que tiene lugar una conmutación adicional de la señal de posición H (instante t3 en la figura 3). En estas condiciones, la conmutación de los conmutadores SW1-SW4 del circuito de excitación en puente DC se determina sólo por la señal H, es decir por la señal de posición angular del rotor, con un ciclo de trabajo que se determina por la señal PWMS. Esta situación sigue aplicándose hasta que la señal N del contador C alcanza el nivel Nref antes de la siguiente conmutación de la señal de posición H del rotor.
La tensión que se aplica durante el arranque, al devanado del estator W es, como ya se ha mencionado, VB x dcmin. Al motor M nunca se le suministra en funcionamiento una tensión...
Reivindicaciones:
1. Sistema de control (ECS) para un motor eléctrico sincrónico (M) que comprende un estator (S) con al menos un devanado (W) y un rotor (R) con imanes permanentes;
comprendiendo el sistema (ECS):
2. Sistema de control según la reivindicación 1, en el que el circuito de control (CC) está diseñado para controlar la tensión aplicada al devanado del estator (W) mediante una señal de control de onda cuadrada con un ancho de pulso modulado (PWMS).
3. Sistema de control según la reivindicación 2, en el que el circuito de control (CC) comprende medios de circuito del tipo lógico (LC) que pueden combinar en modo Y dicha señal de control (PWMS) y la señal de posición del rotor (H) o dicha señal de contaje (N).
4. Sistema de control según una cualquiera de las reivindicaciones anteriores, en el que el circuito de excitación es un circuito en puente en forma de "H".
5. Sistema de control según la reivindicación 4, en el que el circuito en puente en forma de "H" comprende una pluralidad de transistores de tipo MOSFET (SW1-SW4).
6. Método para controlar un motor eléctrico sincrónico (M) que comprende un estator (S) con al menos un devanado (W) y un rotor con imanes permanentes (R);
comprendiendo el método las operaciones de
proporcionar una tensión de suministro de corriente continua predeterminada (VB);
aplicar dicha tensión de corriente continua (VB) a un circuito de excitación (DC) que está conectado a dicho devanado del estator (W) e incluye una pluralidad de conmutadores controlados (SW1-SW4) que están adaptados para permitir el paso de una corriente hacia el devanado del estator (W) selectivamente en un sentido y en el sentido opuesto;
generar una señal de posición eléctrica alterna (H) que es indicativa de la posición angular del rotor (R);
controlar el circuito de excitación basándose en la señal de posición del rotor (H) y para aplicar al devanado del estator (W) una tensión con un valor absoluto que se reduce hasta una extensión predeterminada en comparación con dicha tensión de corriente continua (VB);
a continuación, basándose en la transición del rotor (R) a una posición angular predeterminada, generar una señal de contaje (N) que varía según una función lineal del tiempo (t), y reinicializar esta señal de contaje (N) cuando alcanza un valor de referencia predeterminado (Nref) correspondiente a una velocidad de rotación requerida (?ref) para el motor (M);
a continuación controlar el circuito de excitación (DC) selectivamente basándose en la señal de posición (H) del rotor (R) o basándose en dicha señal de contaje (N), cuando la velocidad de rotación (?) del motor (M) es respectivamente inferior y superior a la velocidad requerida (?ref); y
controlar el circuito de excitación (DC) de modo que se aplica al devanado del estator (W) una tensión, cuyo valor absoluto aumenta así según una función predeterminada cuando la velocidad de rotación (?) del rotor (R) aumenta hasta un valor predeterminado.
7. Método según la reivindicación 6, en el que la tensión aplicada al devanado del estator (W) se controla mediante una señal de onda cuadrada con un ancho de pulso modulado (PWMS).
8. Método según la reivindicación 7, en el que dicha señal de control (PWMS) se combina en un modo lógico con la señal de posición (H) del rotor (R) o con dicha señal de contaje (N).
9. Método según una cualquiera de las reivindicaciones 6 a 8, en el que se usa un circuito de excitación en puente en H.
10. Método según la reivindicación 9, en el que se usa un circuito de excitación en puente en H que comprende una pluralidad de transistores de tipo MOSFET (SW1-SW4).
Patentes similares o relacionadas:
Método para controlar un motor eléctrico de imán permanente, del 13 de Noviembre de 2019, de ELICA S.P.A.: Método para controlar un motor (M) eléctrico de imán permanente monofásico que puede moverse a través de una señal (SC) de alimentación generada por un aparato […]
Controlador, del 16 de Octubre de 2019, de Aeristech Control Technologies Limited: Un sistema de control para un motor o generador de imán permanente que incluye tres bobinados de fase individuales, bobinado de fase A, bobinado […]
Dispositivo de conversión de energía, del 19 de Junio de 2019, de DAIKIN INDUSTRIES, LTD.: Un convertidor de potencia que comprende: un circuito de conversión configurado para convertir corriente alterna en corriente continua; […]
Aparato de detección de la posición del polo magnético para máquinas síncronas, del 3 de Abril de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un aparato de detección de la posición del polo magnético para máquinas síncronas, que comprende: - un medio de circuito , para convertir […]
Dispositivo para controlar un inversor, del 27 de Julio de 2016, de PANASONIC CORPORATION: Un dispositivo para controlar un inversor para accionar un motor adaptado para utilizar un par magnético generado por un flujo magnético de campo y una […]
Regulador de motor de corriente continua, del 26 de Septiembre de 2013, de RUANO MOYANO, José: 1. Regulador de motor de corriente continua , caracterizado por comprender dos tiristores (T1) y (T2) conectados en antiparalelo y un condensador (C). El cátodo del tiristor […]
 Motor eléctrico EC, del 20 de Mayo de 2013, de EBM-PAPST MULFINGEN GMBH & CO.KG: Motor EC , que comprende un motor (M) de corriente continua, excitado de forma permanente, conmutadoelectrónicamente con un dispositivo electrónico de conmutación conectado […]
Motor eléctrico EC, del 20 de Mayo de 2013, de EBM-PAPST MULFINGEN GMBH & CO.KG: Motor EC , que comprende un motor (M) de corriente continua, excitado de forma permanente, conmutadoelectrónicamente con un dispositivo electrónico de conmutación conectado […]
 DISPOSITIVO DE CONTROL PARA UN MOTOR SINCRONO DE IMAN PERMANENTE, del 27 de Mayo de 2010, de ASKOLL P&C S.R.L: Dispositivo de circuito de control para un motor eléctrico síncrono con un rotor de imán permanente con el que están asociados medios […]
DISPOSITIVO DE CONTROL PARA UN MOTOR SINCRONO DE IMAN PERMANENTE, del 27 de Mayo de 2010, de ASKOLL P&C S.R.L: Dispositivo de circuito de control para un motor eléctrico síncrono con un rotor de imán permanente con el que están asociados medios […]