SISTEMA Y METODO DE CAPTURA, PROCESAMIENTO Y REPRESENTACION DE LOCALIZAMIENTO TRIDIMENSIONAL EN TIEMPO REAL DE UNA SEÑAL OPTICA.
Sistema de captura y representación de posicionamientos tridimensionales en tiempo real.
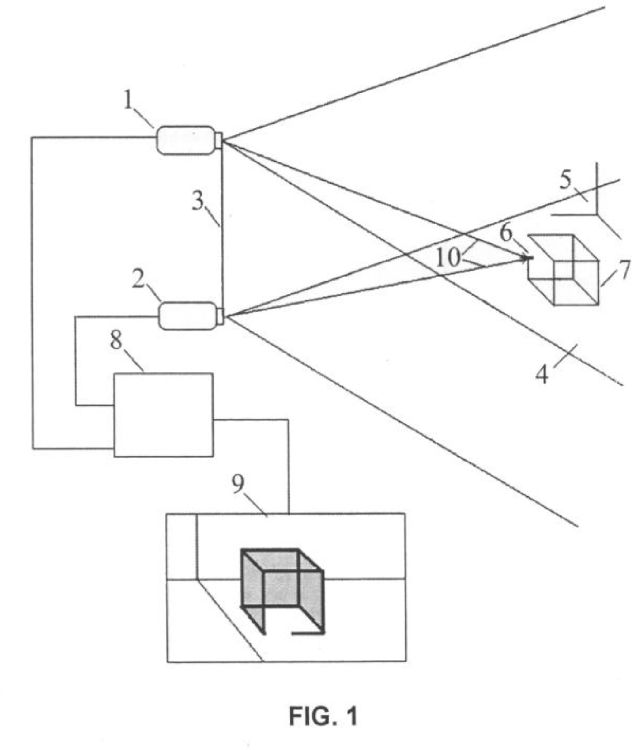
Cuenta con al menos dos cámaras (1, 2) separadas por unas distancias regulables (3), donde la intersección de sus campos visuales define un espacio tridimensional de trabajo (4) en el que se establecen unas coordenadas de referencia (5) y en el que se puede desplazar un señalizador luminoso (6) determinando un recorrido tridimensional (7); estando conectadas esas cámaras (1, 2) a un ordenador (8) que a su vez conecta con unos medios de visualización (9); de manera que empleando determinados algoritmos se reproducen en tiempo real y a través de los referidos medios de visualización (9) el aludido recorrido tridimensional (7)
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200803206.
Solicitante: UNIVERSIDAD DE CORDOBA.
Nacionalidad solicitante: España.
Provincia: CÓRDOBA.
Inventor/es: HERNANDEZ CLEMENTE,PABLO ESTEBAN, GUERRERO GINEL,JOSE EMILIO, LOPEZ LUQUE,RAFAEL, FERNANDEZ DE AHUMADA,LUIS MANUEL, CASTILLO CARRION,SEBASTIAN.
Fecha de Solicitud: 3 de Noviembre de 2008.
Fecha de Publicación: .
Fecha de Concesión: 8 de Febrero de 2010.
Clasificación Internacional de Patentes:
- G01B11/00D
- G01B11/00D1
- G06T7/20S
Clasificación PCT:
- G01B11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
- G01B11/03 G01B […] › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la medida de coordenadas de puntos.
- G06K9/50 G […] › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › G06K 9/00 Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00). › analizando las intersecciones de la forma con líneas predeterminadas.
- G06T7/20 G06 […] › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 7/00 Análisis de imagen. › Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
Fragmento de la descripción:
Sistema y método de captura, procesamiento y representación de localizamiento tridimensional en tiempo real de una señal óptica.
Objeto de la invención
La presente invención, tal y como se expresa en el enunciado de esta memoria descriptiva, se refiere a un sistema y método de captura, procesamiento y representación de localizamiento tridimensional en tiempo real, cuya finalidad consiste en capturar y representar en tiempo real imágenes tridimensionales proporcionadas por uno o varios señalizadores luminosos, de manera que se pueda ir reproduciendo mediante unos medios de visualización el recorrido de ese señalizador tridimensionalmente y simultáneamente a su producción en el tiempo.
La invención es especialmente aplicable a la constitución de una pizarra tridimensional carente de soporte físico, de manera que los movimientos que hace con el señalizador luminoso un usuario sean reproducidos simultánea y tridimensionalmente en otro espacio físico real o virtual.
La invención se enmarca en el sector de tecnologías de visión artificial y aunque presenta como principal aplicación el campo de la docencia, concretamente como pizarra tridimensional sin soporte físico, no se descartan otras aplicaciones, pudiendo ser empleada en cualquier otro sector.
Antecedentes de la invención
En los últimos años estamos asistiendo a un avance espectacular en los conocimientos y aplicaciones de la llamada "realidad virtual", siendo uno de los aspectos más importantes del tratamiento digital de imágenes el análisis de escenas a partir de múltiples cámaras. La visión artificial permite adquirir y analizar imágenes sin contacto directo, con el fin de extraer información deseada para fines tecnológicos, industriales, recreativos u otros, permitiendo establecer relaciones entre el mundo tridimensional y vistas tridimensionales del mismo.
La extracción de información métrica tridimensional (X, Y, Z) a partir de las imágenes bidimensionales tomadas por varias cámaras exige conocer cómo se sitúan las cámaras respecto a la escena tridimensional. El proceso de calibración es crucial para la definición de las coordenadas (X, Y, Z).
Dentro de las técnicas de calibración destacan las propuestas por Tuceryan, Trucco y Zhang, los cuales proponen maneras diferentes para determinar los parámetros de calibración a partir de puntos 3D conocidos y sus correspondientes en el plano imagen 2D. La correspondencia es extraída de forma manual, centrando la atención en la exactitud de los parámetros de cámara entregados (intrínsecos y extrínsecos).
Dentro del conjunto de estas metodologías se conoce el método de Tsai que calcula parámetros intrínsecos tales como distancia focal, coeficiente de distorsión, coordenadas del centro óptico, intersección del eje óptico de la cámara con el plano de la imagen y factor de escala; así como parámetros extrínsecos tales como ángulos de rotación para la transformada entre los ejes del mundo y de la cámara, y componentes del vector de translación para la transformada entre los ejes de la cámara y el mundo.
El referido método de Tsai presenta inconvenientes relativos a que precisa de numerosas ecuaciones, al presentar un gran número de parámetros necesarios para la calibración, determinando un proceso laborioso en cuanto a variables a tener en cuenta y en cuanto al proceso de cálculo.
Debido a que con una sola vista la información de profundidad del espacio 3D se pierde en la proyección, para la reconstrucción 3D son necesarias por lo menos dos vistas. La triangulación consiste en inferir la información 3D a partir de los rayos que van desde los centros ópticos de las imágenes respectivas hasta los puntos proyectados. Como es sabido que el punto 3D que produjo las correspondientes proyecciones pertenece a dichos rayos, se busca entonces la intersección de ellos en el espacio.
No conocemos en el estado actual de la técnica sistemas de captura y representación de posicionamientos tridimensionales en tiempo real tales como el de la presente invención.
Descripción de la invención
Para lograr los objetivos indicados anteriormente, la invención consiste en un sistema de captura, procesamiento y representación de posicionamientos tridimensionales en tiempo real, preferentemente aplicable a la constitución de una pizarra tridimensional carente de soporte físico.
Novedosamente según la invención, el sistema de la misma cuenta con al menos dos cámaras separadas por unas distancias regulables, donde la intersección de sus campos visuales define un espacio tridimensional de trabajo en el que se establecen unas coordenadas de referencia y en el que se puede desplazar un señalizador luminoso determinando un recorrido tridimensional; estando conectadas esas cámaras a un ordenador que a su vez conecta con unos medios de visualización; de manera que se reproduce en tiempo real y a través de los referidos medios de visualización el aludido recorrido tridimensional. Dichos medios de visualización pueden ser medios convencionales existentes actualmente u otros que aparezcan en el futuro.
Según una realización preferente de la invención, el referido señalizador luminoso consiste en un diodo led conectado a una batería.
En esa realización preferente de la invención, el sistema cuenta con filtros extrínsecos, intrínsecos o una combinación de ambos al objeto de regular las condiciones lumínicas del referido espacio tridimensional de trabajo.
Además según diversas realizaciones de la invención, las referidas cámaras pueden emplear sensores digitales, ópticos, infrarrojos u otros.
Novedosamente según la invención, el método consta de 4 etapas:
- a) La calibración de cámaras, debido a que la extracción de información métrica tridimensional (X, Y, Z) a partir de las imágenes bidimensionales tomadas por varias cámaras exige conocer cómo se sitúan las cámaras respecto a la escena tridimensional.
- b) La predicción del movimiento del señalizador que facilita la referida reproducción en tiempo real. Esta etapa se ejecuta simultáneamente a la utilización del sistema, reduce la carga computacional utilizando técnicas informáticas como la búsqueda de los píxeles cercanos y la similitud de estos.
- c) Cálculo de las coordenadas tridimensionales a tiempo real o en retardo según se desee. Esta etapa se efectúa cuando el señalizador ha sido captado por al menos dos cámaras y por tanto se conocen sus respectivos coordenadas bidimensionales imagen necesarios para esta operación junto con los parámetros de calibración calculados en la primera etapa.
- d) Exportación de coordenadas calculadas a cualquier sistema de visualización o herramienta computarizadas a tiempo real o en retardo según el deseo del usuario, presentando el trazado tridimensional seguido por el señalizador o con retardo y el uso de utilidades en estas herramientas como son formas, colores, tamaños, etc.
La presente invención presenta ventajas relativas a que cada información 3D se captura a partir de dos o más imágenes captadas de diferentes puntos de vista mediante técnicas estereoscópicas, configurando un sistema de realidad virtual o entorno virtual que permite al usuario o grupo de usuarios interactuar con dicho sistema, proporcionando una percepción sensorial natural de un mundo tridimensional. El sistema de la invención permite extraer información mediante rastreo en píxeles horizontal y verticalmente, para su posterior procesamiento en el cálculo de información 3D.
La captura del posicionamiento dinámico tridimensional de un señalizador...
Reivindicaciones:
1. Sistema de captura, procesamiento y representación del posicionamiento tridimensional en tiempo real de una señal óptica, preferentemente aplicable a la constitución de una pizarra tridimensional carente de soporte físico; caracterizado por rescatar coordenadas 3D de una o varias señales luminosas en movimiento utilizando cámaras de baja precisión y velocidad, y por que cuenta con filtros para optimizar el reconocimiento de la señal luminosa, que pueden ser filtros extrínsecos, que son combinaciones de filtros lumínicos a una distancia determinada del objetivo de la cámara que regulan la luminosidad de filmación, optimizando el reconocimiento de la señal luminosa a las condiciones lumínicas de la zona de trabajo, filtros intrínsecos, que optimizan el reconocimiento de la señal mediante tratamiento computarizado de las imágenes, o una combinación de ambos, al objeto de regular las condiciones lumínicas del referido espacio tridimensional de trabajo (4), en el que se desplaza un señalizador luminoso (6) determinando un recorrido tridimensional (7). La utilización de un correcto conjunto de algoritmos compromete total o parcialmente la utilización de la invención.
2. Método de captura, procesamiento y representación del posicionamiento tridimensional en tiempo real de una señal óptica, caracterizado porque comprende:
- a) Calibración de cámaras debido a que la extracción de información métrica tridimensional (X, Y, Z) a partir de las imágenes bidimensionales tomadas por varias cámaras exige conocer cómo se sitúan las cámaras respecto a la escena tridimensional.
- b) Predicción del movimiento del señalizador mediante la búsqueda de píxeles cercanos y la similitud éstos.
- c) Calculo de las coordenadas tridimensionales a tiempo real o en retardo a partir de las respectivas coordenadas bidimensionales del señalizador determinado, una vez que éste ha sido capturado por al menos dos cámaras.
- d) Exportación y representación de estos datos en tiempo real o con retardo.
3. Método de captura, procesamiento y representación del posicionamiento tridimensional en tiempo real de una señal óptica según reivindicación 2, caracterizado porque en la etapa a) de calibración se emplea una variante simplificada del algoritmo de Tsai, es necesaria la realización de esta previamente a la utilización de la invención, esta variante permite trabajar definiendo un menor número de parámetros, reduciendo a siete las variables a definir en comparación de los once recomendados por Tsai, en concreto son los siguientes: F (distancia focal), Cx, Cy, Cz (componentes del vector CF), ? (Precisión), ? (Nutación), F (Rotación propia).
4. Método de captura, procesamiento y representación de del posicionamiento tridimensional en tiempo real de una señal óptica según la reivindicación 2, caracterizado porque en la etapa d) de exportación a cualquier sistema de visualización o herramienta computarizadas en tiempo real o en retardo, presentando el trazado tridimensional seguido por el señalizador o con retardo y el uso de utilidades en estas herramientas como son formas, colores, tamaños, recorridos, velocidad, aceleración, etc.
Patentes similares o relacionadas:
 SISTEMA PORTATIL PARA CAPTURA Y ANALISIS TRIDIMENSIONAL DEL MOVIMIENTO HUMANO EN PUESTOS DE TRABAJO, del 1 de Agosto de 2007, de UNIVERSIDAD DE ZARAGOZA.: Sistema portátil para captura y análisis tridimensional del movimiento humano en puestos de trabajo.#El sistema está compuesto de una cabeza de estéreo-visión […]
SISTEMA PORTATIL PARA CAPTURA Y ANALISIS TRIDIMENSIONAL DEL MOVIMIENTO HUMANO EN PUESTOS DE TRABAJO, del 1 de Agosto de 2007, de UNIVERSIDAD DE ZARAGOZA.: Sistema portátil para captura y análisis tridimensional del movimiento humano en puestos de trabajo.#El sistema está compuesto de una cabeza de estéreo-visión […]
DISPOSITIVO PARA MEDIR Y/O AJUSTAR UNA HERRAMIENTA, del 20 de Diciembre de 2011, de DMG MICROSET GMBH: Dispositivo para medir y/o ajustar una herramienta , con una primera cámara que hay que orientar hacia la herramienta , la cual es soportada […]
PROCEDIMIENTO DE MEDICIÓN DE UN OBJETO TRIDIMENSIONAL, O DE UN CONJUNTO DE OBJETOS, del 8 de Noviembre de 2011, de COMMISSARIAT À L'ÉNERGIE ATOMIQUE ET AUX ÉNERGIES ALTERNATIVES AREVA NC: Procedimiento de medición de un objeto tridimensional en un entorno tridimensional, que comprende las etapas de: - tomar al menos una imagen del entorno […]
DISPOSITIVO DE MEDICIÓN DE COTAS GEOMÉTRICAS, del 2 de Julio de 2020, de EMPRESA DE TRASPORTE MASIVO DEL VALLE DE ABURRA LTDA. - METRO DE MEDELLIN LTDA: La presente invención se refiere a dispositivos y métodos de medición de cotas geométricas en cables de un teleférico para verificar que el desplazamiento del cable […]
Sistema de medición óptica, del 10 de Junio de 2020, de METRONOR A/S: Un sistema para la medición de coordenadas espaciales y/o la orientación de una sonda , que comprende: a) un primer sensor de dirección espacial […]
Procedimiento y sistema para la calibración de un sistema de visión por ordenador, del 1 de Abril de 2020, de Oy Mapvision Ltd: Procedimiento para la calibración de un sistema de visión por ordenador tridimensional, comprendiendo dicho procedimiento las etapas de: disponer […]
Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución y procedimiento correspondiente, del 1 de Abril de 2020, de DWFritz Automation, Inc: Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución, denominada pieza hueca que va a controlarse, comprendiendo […]
Detección de posición, del 18 de Marzo de 2020, de Airbus Operations Limited: Aparato para determinar la posición de un objeto que tiene uno o más elementos magnéticos , el aparato comprende una […]