SISTEMA PARA LA MEDIDA DE RUIDO Y LOCALIZACION DE UNA FUENTE MOVIL ENPRESENCIA DE RUIDO DE FONDO.
Sistema para la medida de ruido y localización de una fuente móvil en presencia de ruido de fondo.
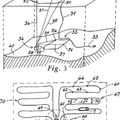
Sistema de medida de ruido que consigue eliminar del registro sonoro cualquier ruido distinto al generado por la fuente, incluso si ambos se han producido simultáneamente, además proporciona las tres coordenadas de posición necesarias para situar la fuente en cada instante mientras su ruido es audible.El sistema consta de un conjunto de micrófonos no inferior a 7 esparcidos alrededor de la trayectoria de la fuente. Las señales son adquiridas con el objetivo de eliminar las componentes de ruido no comunes y aislar la componente común que es el ruido de la fuente. La componente no común es el ruido de fondo presente en el sitio de medida, que se supone distinto para cada micrófono. La componente común está afectada de distinta manera por el efecto Doppler en función de la posición de cada receptor respecto la fuente; estas diferencias permiten establecer la posición de la fuente en cada instante
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200802769.
Solicitante: UNIVERSITAT POLITECNICA DE CATALUNYA.
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: ROMEU GARBI,JORDI, PAMIES GOMEZ,TERESA, GENESCA FRANCITORRA,MERITXELL.
Fecha de Solicitud: 25 de Septiembre de 2008.
Fecha de Publicación: .
Fecha de Concesión: 8 de Junio de 2011.
Clasificación Internacional de Patentes:
- G01S5/18 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › que utilizan ondas ultrasonoras, sonoras, o infrasonoras.
- G01S5/30 G01S 5/00 […] › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Clasificación PCT:
PDF original: ES-2343931_B1.pdf
Fragmento de la descripción:
Sistema para la medida de ruido y localización de una fuente móvil en presencia de ruido de fondo.
Sector de la técnica
El sistema permite obtener el registro sonoro de una fuente móvil sin influencia del resto de fuentes sonoras que contribuyan al campo acústico del lugar de la medida. Al mismo tiempo es capaz de determinar la posición en el espacio de dicha fuente móvil. Actualmente esto es también posible mediante el uso antenas de micrófonos tridimensionales. El sistema que se presenta es alternativo a este puesto que en algunas aplicaciones ofrece mejores prestaciones.
Estado de la técnica
Medida de la emisión acústica de fuentes móviles de trayectoria desconocida en presencia de ruido de fondo.
El desarrollo de técnicas para medir la emisión acústica de una fuente móvil de trayectoria desconocida en presencia de ruido de fondo nace básicamente de la necesidad de medir la emisión acústica de las aeronaves en sobrevuelo en los alrededores de los aeropuertos. A este fin, los aeropuertos disponen de una red de receptores acústicos no vigilados que miden continuamente el registro de ruido de su emplazamiento. Conocer la trayectoria de la fuente permite saber automáticamente durante qué intervalo de tiempo ha sobrevolado el receptor, con lo cual se sabrá en que parte del registro temporal sonoro se encuentra su contribución. Muchas veces, aunque los aeropuertos dispongan de radar, los datos sobre la trayectoria exacta de cada avión están protegidos por motivos de seguridad y si se proporcionan, es al cabo de días. En caso de no tener acceso a los datos sobre la trayectoria de la aeronave, hay distintas técnicas en desarrollo para reconocer en que momento un receptor está siendo sobrevolado por un avión:
Métodos de reconocimiento de señal
Estos métodos intentan imitar los procedimientos que sigue un ser humano para reconocer la fuente que está causando un ruido concreto, a través del uso de redes neuronales (inteligencia artificial). Se trata de construir una extensa base de datos con registros sonoros de aviones de distintos modelos y en distintos tipos de operación (despegue, aterrizaje y sobrevuelo) parametrizados. Los parámetros de interés son, la características de la huella del paso de avión en el registro sonoro (longitud, forma...), contenido frecuencial (espectro de frecuencia, existencia de componentes tonales...), variación temporal del espectro frecuencial (efecto Doppler). Dichos parámetros son comparados con los del registro sonoro proporcionado por los micrófonos para concluir si el ruido registrado pertenece, o no, al paso de un avión.
Medidas direccionales de intensidad sonora
Este método implica la medida no de la presión sonora en el punto de medida, sino de la intensidad. La ventaja reside en el hecho que la intensidad es una magnitud vectorial, de manera que indica módulo, dirección i sentido del flujo neto de energía por unidad de área. De este modo, cuando un avión sea la fuente sonora predominante, el vector intensidad apuntará en dirección al cielo, aunque no exactamente hacia dónde esté el avión si hay ruido de fondo presente, puesto que la intensidad total será la suma de los vectores intensidad del avión, que este sí que apuntará hacia el avión, y el vector de ruido urbano, que apuntará hacia la fuente de ruido urbano.
La dirección del vector intensidad puede utilizarse, entonces, para discernir si el receptor está siendo sobrevolado por un avión o no.
A pesar de que métodos como los descritos sirvan para identificar un determinado evento sonoro como provocado por el paso de un avión o no, puede ocurrir que otras fuente de ruido presentes en el lugar de la medida estén contribuyendo simultáneamente al registro temporal sonoro. Los sistemas anteriores atribuyen a las aeronaves el global del ruido medido durante el periodo de sobrevuelo, con lo que su emisión acústica puede estar sobreestimada. En consecuencia, aparece la necesidad de separar el ruido provocado por las aeronaves del ruido de fondo del lugar de la medida.
Medidas con matrices de micrófonos
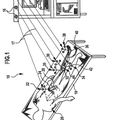
Una matriz de micrófonos consta de un conjunto de micrófonos que muestrean el campo acústico simultáneamente en distintas posiciones del espacio. En contraposición a los sistemas que usan un solo micrófono, tienen la capacidad de determinar la cantidad de energía sonora que llega de una posición concreta del espacio, de una dirección determinada, o que incide con un ángulo determinado, en función de si la matriz es 3D, 2D o 1D respectivamente. El principio básico de funcionamiento es que la señal recibida en los micrófonos es la misma pero desfasada un cierto intervalo de tiempo, dicho desfase temporal está relacionado con el ángulo de incidencia de las ondas sonoras. Así, si el desfase temporal es medido en tres direcciones perpendiculares del espacio, la posición de la fuente queda determinada. Las matrices de micrófonos se utilizan cuando es preciso medir la aportación sonora de las distintas fuentes que contribuyen al campo sonoro desde distintas posiciones del espacio. Así pues, en el caso de aplicar esta técnica a la monitorización de aeropuertos usando un número elevado de micrófonos, basta con una matriz lineal de micrófonos que integre la presión del ruido que incide con ángulos por encima de la horizontal de referencia (que pasa por el micrófono más alto de la antena), i que corresponderá a ruido de aviones. De esta manera, cuando se mide ruido procedente de ángulos por encima de la horizontal es que se está produciendo el sobrevuelo, y el ruido medido es únicamente causado por las aeronaves.
Hay también desarrollos de matrices de micrófonos con bajo número de receptores que consiguen el mismo efecto añadiendo modificaciones al procesado de señal convencionalmente utilizado.
Breve descripción de la invención
El sistema consta de 7 o más micrófonos esparcidos alrededor de la trayectoria de la fuente que registran la señal acústica simultáneamente. Dicha señal es la suma del ruido de fondo del sitio de medida (distinto para cada micrófono), y el ruido del avión. El ruido del avión es distinto para cada micrófono en frecuencia (debido al Efecto Doppler), y en amplitud (debido a la diferencia de distancia entre la fuente y cada receptor, y en consecuencia a la atenuación atmosférica y geométrica).
Para poder localizar la fuente se ha desarrollado una función matemática que permite encontrar el cual es el corrimiento frecuencial entre dos espectros, con lo que se puede conocer el corrimiento frecuencial relativo entre dos micrófonos. Geométricamente se puede establecer la ecuación que relaciona dicho corrimiento frecuencial relativo, y la posición y velocidad de la fuente. Planteando esta ecuación entre un micrófono de referencia y un mínimo de 6 otros micrófonos, se consigue un sistema de 6 ecuaciones no lineales con 6 incógnitas (las tres componentes de la posición, y las tres componentes de la velocidad).
Una vez ha sido localizada la fuente puede calcular-se el corrimiento frecuencial absoluto que afecta la señal de cada micrófono debido al Efecto Doppler, y corregirlo. De esta manera se obtiene un conjunto de 7 señales (una por micrófono) que contienen el ruido emitido por el avión con distinta amplitud en función de la distancia entre cada receptor y la fuente, más una señal de ruido distinta para cada receptor.
Como la posición de la fuente es conocida, también lo es la distancia entre esta y cada receptor, de manera que puede compensarse también el efecto de la atenuación geométrica y atmosférica para obtener un conjunto de 7 señales que contienen el ruido emitido por el avión (la misma en todos los casos), más una señal de ruido distinta para cada micrófono. La señal de ruido puede ser eliminada calculando el espectro cruzado entre las distintas señales, y promediándolos. De esta forma se obtiene la potencia acústica de la fuente móvil.
Descripción detallada del método
Los datos de entrada son las señales de los 7 micrófonos; cada una de ellas está compuesta por el ruido procedente de la aeronave más el ruido de fondo. El ruido de la aeronave está afectado de diferente manera por el efecto Doppler en cada receptor, y tiene distinta amplitud debido a la diferencia en los caminos de propagación.
En el método expuesto en esta patente, se ha desarrollado una función matemática que permite determinar el efecto Doppler relativo entre dos señales a pesar de que estén mezcladas con ruido. Sean... [Seguir leyendo]
Reivindicaciones:
1. Sistema para la medida de ruido y localización de una fuente móvil en presencia de ruido de fondo, basado en la medida simultánea del campo acústico con un mínimo de 7 micrófonos esparcidos alrededor de la trayectoria de la fuente que:
- utiliza la Función de Correlación por Producto:

donde:
Xr}n(f) es el valor para la frecuencia f de la Transformada de Fourier de la señal xrn(t).
Xrm(f . δf) es el valor para la frecuencia f.δf de la Transformada de Fourier de la señal xr_{m(t).
para determinar el corrimiento frecuencial relativo entre dos espectros provocado por el Efecto Doppler.
- utiliza un sistema de ecuaciones no lineales que relacionan la posición y la velocidad de la fuente móvil con el corrimiento frecuencial relativo entre dos receptores, para determinar la posición y la velocidad de la fuente.
- calcula la potencia de la fuente de ruido compensando la influencia del Efecto Doppler, y las atenuaciones atmosférica y geométrica de las seis señales, y calculando la media de los espectros cruzados entre dichas señales apareadas.
Patentes similares o relacionadas:
Dispositivo, método y sistema de ayuda en la recuperación, del 21 de Agosto de 2019, de CENTRE NATIONAL D'ETUDES SPATIALES: Dispositivo de ayuda en la recuperación (110a, 120a) que comprende: - una unidad de procesamiento de señales (111a, 121a) de un tipo definido para realizar […]
Dispositivo para la localización de herramientas en procesos de producción, del 17 de Mayo de 2017, de Sarissa GmbH: Dispositivo para la supervisión de procesos de producción, especialmente de procesos de montaje de máquinas o equipos, estando provista una pieza móvil a tratar […]
Métodos y sistemas para localización pasiva de alcance y profundidad, del 6 de Junio de 2012, de RAYTHEON COMPANY: Un método para determinar un alcance y una profundidad de un objetivo submarino , que comprende:recibir una señal sonora del objetivo , en el que la señal sonora […]
 MÉTODOS Y SISTEMAS PARA NAVEGAR BAJO EL AGUA, del 14 de Febrero de 2011, de ATLAS ELEKTRONIK GMBH: Un método para determinar la posición absoluta bajo el agua de una embarcación sumergible que tiene un sistema de navegación de reconocimiento aislado o incomunicado, que […]
MÉTODOS Y SISTEMAS PARA NAVEGAR BAJO EL AGUA, del 14 de Febrero de 2011, de ATLAS ELEKTRONIK GMBH: Un método para determinar la posición absoluta bajo el agua de una embarcación sumergible que tiene un sistema de navegación de reconocimiento aislado o incomunicado, que […]
SISTEMA DE LOCALIZACION DE CETACEOS POR SONAR PASIVO PARA EVITAR, del 1 de Abril de 2002, de ANDRE,MICHEL: WACS: Whale Anti-Collision System (Sistema de sonar pasivo para evitar colisiones con cetáceos) Consiste en un sistema permanente de localización pasiva […]
PROCEDIMIENTO DE RECONOCIMIENTO Y DE DETERMINACION DE POSICION DE OBJETOS., del 16 de Mayo de 1998, de CONSEJO SUPERIOR INVESTIGACIONES CIENTIFICAS: PROCEDIMIENTO DE RECONOCIMIENTO Y DE DETERMINACION DE POSICION DE OBJETOS. LA PRESENTE PATENTE TRATA DE UN PROCEDIMIENTO PARA EL RECONOCIMIENTO EN TIEMPO REAL DE OBJETOS SEGUN […]
DISPOSITIVO PARA SEGUIMIENTO DE CUERPOS MOVILES MEDIANTE ULTRASONIDOS., del 16 de Agosto de 1997, de UNIVERSIDAD DE CASTILLA LA MANCHA / LABORATORIO DE INFORMATICA APLICADA: DISPOSITIVO PARA SEGUIMIENTO DE CUERPOS MOVILES MEDIANTE ULTRASONIDOS. CADA ELEMENTO MOVIL A SEGUIR DISPONE DE UN EMISOR DE PULSOS DE ULTRASONIDOS […]
 DISPOSITIVO REFERENCIADOR DE ROTULA, del 16 de Marzo de 2009, de AESCULAP AG: Dispositivo referenciador de rótula para determinar la posición espacial de una rótula de una articulación de rodilla humana durante una intervención […]
DISPOSITIVO REFERENCIADOR DE ROTULA, del 16 de Marzo de 2009, de AESCULAP AG: Dispositivo referenciador de rótula para determinar la posición espacial de una rótula de una articulación de rodilla humana durante una intervención […]