SISTEMA DE INSPECCION NO DESTRUCTIVA POR ULTRASONIDOS PARA REGISTRO FLEXIBLE CON ENCODER INALAMBRICO.
Sistema para realizar inspecciones mediante la técnica de ultrasonidos utilizando un sistema inalámbrico para la adquisición de los datos ligados a la posición de la sonda (con la que se realiza la inspección) así como a su orientación espacial,
permitiendo realizar un registro de la posición y señal ultrasónica de gran presión y exactitud, sin la necesidad de utilizar encoders u otros sistemas mecánicos o aparatosos y que en general no posibilitan la inspección flexible de distintas piezas de geometrías compleja con el mismo sistema.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201132145.
Solicitante: FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL.
Nacionalidad solicitante: España.
Inventor/es: VELA MARTINEZ,JUAN PEDRO, ESPIN GARCIA,Alvaro, DE LOS SANTOS TRIGO,Silvia, LASAGNI,Fernando, VIGURIA JIMENEZ,Antidio, SANTAMARIA MORENO,Maria De La Luz, ALARCÓN ROMERO,Francisco.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B17/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de vibraciones infrasonoras, sonoras o ultrasonoras.
- G01S15/00 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar.
Fragmento de la descripción:
Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico.
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un sistema para realizar inspecciones mediante la técnica de ultrasonidos utilizando un sistema inalámbrico para la adquisición de los datos ligados a la posición de la sonda (con la que se realiza la inspección) así como a su orientación espacial, permitiendo realizar un registro de la posición y señal ultrasónica de gran presión y exactitud.
La presente invención se encuadra dentro del sector de la técnica de los ensayos no destructivos siendo su ámbito de aplicación los sectores aeronáutico, espacial, ferroviario, de la automoción, naval y de la construcción, principalmente.
ESTADO DE LA TÉCNICA
Los sistemas de inspección actuales con registro en posición de la señal ultrasónica están basados en posicionadores o “encoders” mecánicos de poca flexibilidad. En general estos están limitados a la inspección de piezas planas (con encoder lineales) , de curvatura limitada (encoder curvos) o sistemas a medida para la inspección de elementos de geometría variada, estos últimos se fabrican de forma expresa y personalizada para una aplicación particular.
No se ha encontrado en el estudio del estado de la técnica realizado ningún sistema similar al propuesto que permita el posicionamiento de la sonda de ultrasonidos mediante un sistema inalámbrico basado en ninguna tecnología. Existen múltiples sistemas que realizan inspección de “no contacto” mediante visión (v.gr. FR2923606 (A1) – Nondestructively controlling welding point, by examining welding point surface using a camera, quantifying distribution of chromatic density/halo formed around crucible juntion, and comparing value determined at interval of reference value [“Control no destructivo de puntos de soldadura mediante examen de la superficie de soldadura utilizando una cámara, cuantificando la distribución de densidad cromática y halos formados alrededor de los puntos de unión y comparando los valores los valores determinados en intervalos frente a valores de referencia]) y diferentes técnicas de ultrasonidos (v.gr. RU2008130970 (A) - Non-destructive inspection method [“Método de inspección no destructivo”]) , como pueden ser los dispositivos “phased array” o los ultrasonidos láser, capaces de generar la vibración que provoca las ondas sonoras por impulsos láser, pero el objeto de la presente invención no es una mejora ni modificación en el sistema de ultrasonidos propiamente, y sería de aplicación a cualquiera de los mencionados anteriormente. Así mismo se han encontrado en la bibliografía diferentes propuestas para la realización de inspecciones utilizando metodología basada en luz, bien visible bien en otros rangos de frecuencias (v.gr. WO2007149050 – Method and apparatus for 3-Dimensional visión and inspection of ball and like protusions of electronic components [“Método y aparato para visión tridimensional e inspección de bolas y protusiones de componentes electrónicos”]) así como sistemas basados en visión o en láser (laser-scan) para la reconstrucción de modelos tridimensionales de piezas, pero tampoco es el objeto de la presente invención (v.gr. US 2009279772 – Method and system for identifying defects in NDT image data [“Método y sistema para identificar defectos en imágenes de datos de sistemas NDT”]) .
EXPLICACIÓN DE LA INVENCIÓN
La presente invención consiste esencialmente en un sistema para inspección de componentes por ultrasonidos que permite el registro en posición y actitud de los datos ultrasónicos obtenidos durante la inspección sin la necesidad de utilizar encoders u otros sistemas mecánicos o aparatosos y que en general no posibilitan la inspección flexible de distintas piezas de geometrías compleja con el mismo sistema.
El sistema objeto de la invención consta principalmente de tres subsistemas y los interfaces necesarios para su integración y funcionamiento. Los tres subsistemas son: escáner de ultrasonidos para ensayos no destructivos, subsistema de posicionamiento a distancia, finalmente, el tercer subsistema, junto a los interfaces necesarios, es el que denominaremos subsistema de control.
El principio de funcionamiento de la invención se basa en la posibilidad de obtener la posición y la orientación de la sonda de inspección de un escáner de ultrasonidos de forma precisa y sin necesidad de utilizar dispositivos mecánicos adicionales a la sonda emisora-receptora para determinar su posición y actitud. El subsistema de control permite la determinación de la posición y orientación de la sonda de inspección (ubicación del plano normal de inspección) de forma coordinada con la toma de medidas del escáner, consiguiendo así aparear medidas con posiciones y orientaciones obteniéndose los datos completos de la inspección (C-Scan) , este apareamiento no tiene por qué ser totalmente síncrono, en el sentido de que si la medida de la sonda de ultrasonidos se realiza entre dos adquisiciones de datos del sistema de posicionamiento, se pueden interpolar los datos para determinar la posición en el momento de la medida; si la frecuencia de muestreo es suficientemente alta, el error introducido al interpolar podrá considerarse no representativo. Estos datos, de posición y orientación de la sonda de medida por ultrasonidos junto con los datos obtenidos mediante el sistema de ultrasonidos, se almacenan en una base de datos que permite su acceso posterior para su estudio. Adicionalmente, se obtiene también un mapa preciso de las zonas inspeccionadas así como la orientación de la sonda durante la inspección, lo que permite parametrizar la superficie de la pieza objeto de la inspección localizando de forma precisa los posibles defectos hallados y teniendo una imagen en tres dimensiones de la pieza objeto de la inspección. El subsistema de control se encargará, además, de almacenar los datos de posición y orientación, debidamente apareados con los resultados de la inspección por ultrasonidos en una base de datos que permita retomar la inspección si se deja inacabada, recuperar los datos para análisis posteriores y, en general, tener acceso a los datos para poder transmitirlos o usarlos con posterioridad.
El subsistema de control podemos dividirlo, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos será el encargado de recoger los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. Este subsistema incluirá, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación es aquel que realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, así mismo proporcionará la señal de reloj que permita, bien sincronizar la toma de muestras o bien realizar la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de control es también el encargado de determinar cómo y dónde se almacenan los datos así como de comandar el inicio y fin de la captura de datos. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionarán los datos obtenidos con el escáner de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida con el escáner de ultrasonidos.
DESCRIPCIÓN DE LAS FIGURAS
Para complementar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de figuras en donde, con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
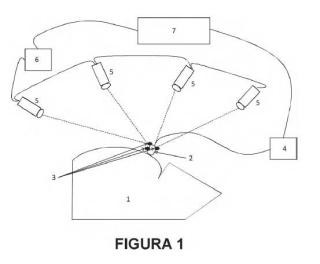
¡Error! No se encuentra el origen de la referencia.Figura 1. Se representa un diagrama del sistema completo donde se pueden identificar el subsistema de control, el equipo de ensayos no destructivos por ultrasonidos (NDT) , el subsistema de posicionamiento a distancia, el objeto de la inspección (DUT) .
¡Error! No se encuentra el origen de la referencia.Figura 2. Se representa esquemáticamente el sistema de localización a distancia incluyendo cinco cámaras y cuatro marcadores sobre la sonda de inspección por ultrasonidos,...
Reivindicaciones:
1. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico caracterizado por estar integrado por tres subsistemas: subsistema consistente en escáner de ultrasonidos para ensayos no destructivos, subsistema de posicionamiento a distancia y subsistema de comunicaciones, control, recogida y almacenamiento de datos, , más los interfaces necesarios para conectar entre sí los mismos.
2. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1, caracterizado porque el escáner de ultrasonidos para ensayos no destructivos consiste en una sonda emisora-receptora de pulsos sonoros a frecuencias ultrasónicas en el que, analizando los tiempos de retardo de los ecos, se obtiene información sobre las inter-fases internas del material y se pueden detectar anomalías respecto al patrón esperado.
3. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1 y 2, caracterizado porque el subsistema de posicionamiento a distancia está compuesto por un conjunto de cámaras dotadas de un sistema de control de identificación de marcadores colocados sobre la pieza a controlar en posición y orientación.
4. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 1, 2 y 3, caracterizado porque el subsistema de
control será el encargado de recoger los datos suministrados por los otros dos subsistemas y aparearlos con objeto de recabar la información precisa de la posición y la orientación de la sonda de ultrasonidos para cada medida realizada. El subsistema de control gestiona el almacenamiento de los datos recibidos en una base de datos, y determina el modo y lugar de almacenamiento de los datos así como determina el inicio y fin de la captura de datos.
5. Sistema de inspección no destructiva por ultrasonidos para registro flexible con encoder inalámbrico de acuerdo con la reivindicación 4, caracterizado porque el subsistema de control se divide, a su vez, en tres subsistemas: el subsistema de adquisición de datos, el subsistema de coordinación, y el subsistema de almacenamiento. El subsistema de adquisición de datos recoge los datos enviados desde el sistema de cámaras así como desde el escáner de ultrasonidos. El subsistema de adquisición incluye, además de la o las tarjetas de adquisición de datos necesarias, las interfaces para adaptar los datos desde las salidas de los otros dos sistemas para que puedan ser debidamente recogidos a través de las tarjetas de adquisición. El subsistema de coordinación realiza la asociación entre los datos adquiridos por el sistema de cámaras y el escáner de ultrasonidos, y proporciona la señal de reloj para la sincronización de la toma de muestras o, en su caso, para la interpolación de los datos si la toma de muestras no se realiza de forma síncrona con la adquisición de posiciones y orientaciones de la sonda del escáner de ultrasonidos. El subsistema de almacenamiento comprenderá una base de datos en la que se relacionan los datos obtenidos con el escáner de ultrasonidos con las posiciones y orientaciones de la sonda medidas, o calculadas, en el momento de la medida
con el escáner de ultrasonidos. Dicha base de datos puede almacenarse en cualquier dispositivo de almacenamiento electrónico que contenga el subsistema de los algoritmos de control y coordinación.
Patentes similares o relacionadas:
Herramienta de inspección ultrasónica para la cubierta del orificio de acceso, del 1 de Enero de 2020, de WESTINGHOUSE ELECTRIC COMPANY LLC: Un aparato para la inspección ultrasónica de una soldadura de la cubierta del orificio de acceso sobre una placa de soporte de la envolvente de núcleo en un reactor […]
Dispositivo y procedimiento para monitorear la posición de un objeto mediante ondas acústicas, del 9 de Octubre de 2019, de ELESTA GmbH: Dispositivo para monitorear la posición de un objeto, así como su distancia de un emisor de ondas acústicas mediante ondas acústicas, con una pieza de sensor con - al […]
 Procedimiento y disposición para medir separaciones de un vehículo ferroviario con respecto a objetos dispuestos lateralmente al vehículo ferroviario, del 29 de Mayo de 2019, de BOMBARDIER TRANSPORTATION GMBH: Procedimiento para medir separaciones de un vehículo ferroviario con respecto a objetos dispuestos lateralmente al vehículo ferroviario , en particular a un borde de andén […]
Procedimiento y disposición para medir separaciones de un vehículo ferroviario con respecto a objetos dispuestos lateralmente al vehículo ferroviario, del 29 de Mayo de 2019, de BOMBARDIER TRANSPORTATION GMBH: Procedimiento para medir separaciones de un vehículo ferroviario con respecto a objetos dispuestos lateralmente al vehículo ferroviario , en particular a un borde de andén […]
CELDA DE INSPECCIÓN NO DESTRUCTIVA DE PIEZAS CON POSICIONAMIENTO VISUAL, del 16 de Abril de 2019, de TECNATOM,S.A.: 1. Celda de inspección con posicionamiento visual, para inspección de piezas (P), con un subsistema de inspección , con al menos un sensor […]
CELDA Y PROCEDIMIENTO DE INSPECCIÓN CON POSICIONAMIENTO VISUAL, del 16 de Julio de 2018, de TECNATOM,S.A.: La celda de inspección con posicionamiento visual de piezas (P) posee un subsistema de inspección , con sensores , y un subsistema de posicionamiento […]
Aparato de medición de longitud, del 26 de Octubre de 2016, de seca ag: Aparato de medición de longitud con una corredera de medición , una guía lineal en forma de un perfil hueco , en el cual la corredera de medición […]
Dispositivo para determinar una longitud de extensión de una pieza de máquina extensible, del 15 de Octubre de 2014, de MOBA - MOBILE AUTOMATION AG: Dispositivo para determinar una longitud de extensión de una pieza de máquina extensible con un primer sensor ultrasónico que comprende un primer […]
 PROCEDIMIENTO DE MEDIDA DE HUNDIMIENTO DE UN AMORTIGUADOR Y SU APLICACION EN UN TREN DE ATERRIZAJE DE AERONAVE, del 29 de Marzo de 2010, de MESSIER-DOWTY SA: Procedimiento de verificación de un nivel de fluido hidráulico de un amortiguador comprendiendo una primera parte y una segunda parte […]
PROCEDIMIENTO DE MEDIDA DE HUNDIMIENTO DE UN AMORTIGUADOR Y SU APLICACION EN UN TREN DE ATERRIZAJE DE AERONAVE, del 29 de Marzo de 2010, de MESSIER-DOWTY SA: Procedimiento de verificación de un nivel de fluido hidráulico de un amortiguador comprendiendo una primera parte y una segunda parte […]