SISTEMA DE CONTROL REDUNDANTE.
Un sistema de control redundante con - un primero y un segundo ordenador de control (1,
2), en los que esta conectada en cada caso una unidad periferica (4, 5), - un convertidor de medicion (14) de dos conductores, que esta conectado con una primera y con una segunda conexion (15a, 15b, 16a, 16b) en las unidades perifericas (4, 5), en el que el convertidor de medicion (14) de dos conductores imprime a las unidades perifericas (4, 5) una corriente de medicion en funcion de una variable a detectar, caracterizado porque - cada unidad periferica (4, 5) esta provista con un primero y con un segundo circuito de medicion (12a, 12b, 13a, 13b) para la deteccion de la corriente de medicion, en el que a traves de un primer conmutador controlable (17a, 17b) se puede conmutar una linea de alimentacion de tension (VL) a traves del primer circuito de medicion (12a, 12b) en la primera conexion (15a, 15b) del convertidor de medicion (14) de dos conductores y a traves de un segundo conmutador controlable (18a, 18b) se puede conmutar un potencial de masa a traves del segundo circuito de medicion (13a, 13b) en la segunda conexion (16a, 16b) del segundo convertidor de medicion (14) de dos conductores, en el que los circuitos de medicion (12a, 12b, 13a, 13b) presentan en cada caso una resistencia de medicion (R), en el que la resistencia de medicion (R) del primer circuito de medicion (12a, 12b) esta conectada entre el primer conmutador controlable (17a, 17b) y la primera conexion (15a, 15b, 16a, 16b) y la resistencia de medicion (R) del segundo circuito de medicion (13a, 13b) esta conectada entre la segunda conexion (15a, 15b, 16a, 16b) y el segundo conmutador controlable (18a, 18b) - en un modo de funcionamiento redundante, el primer circuito de medicion (12a, 12b) de una unidad periferica (3, 5) esta conectado en serie con el segundo circuito de medicion (13a, 13b) de la otra unidad periferica (4, 5), en el que en funcion de una senal de control en cada unidad periferica, se evalua la corriente de medicion del primero (12a, 12b) o del segundo (13a, 13b) circuito de medicion, y - en el caso de que una de las unidades perifericas (4, 5) este perturbada, la corriente de medicion circula a traves del primero (12a, 12b) y del segundo circuito de medicion (13a, 13b) de la otra unidad periferica (4, 5) conectada en un modo de funcionamiento no redundante
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2004/014306.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: KREB,WALTER, LEHMANN,ULRICH.
Fecha de Publicación: .
Fecha Solicitud PCT: 15 de Diciembre de 2004.
Clasificación Internacional de Patentes:
- G05B19/05S
Clasificación PCT:
- G05B19/05 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Controladores lógicos programables, p. ej. que simulen las interconexiones lógicas de señales según diagramas en escalera o gráficos de funciones.
Clasificación antigua:
- G05B19/05 G05B 19/00 […] › Controladores lógicos programables, p. ej. que simulen las interconexiones lógicas de señales según diagramas en escalera o gráficos de funciones.
Países PCT: Alemania, España, Francia, Reino Unido, Italia.
PDF original: ES-2362280_T3.pdf
Fragmento de la descripción:
La invención se refiere a un sistema de control redundante con un primero y un segundo ordenador de control, en los que está conectada en cada caso una unidad periférica, y con un convertidor de medición de dos conductores, que está conectado con una primera y con una segunda conexión en las unidades periféricas, en el que el convertidor de medición de dos conductores imprime a las unidades periféricas una corriente de medición en función de una variable a detectar.
Se conoce a partir del Catálogo de Siemens ST 70, Capítulos 1 y 5, edición de 2003, el sistema de automatización SIMATIC S7-400H de alta disponibilidad con estructura diseñada redundante así como la conexión IM153-2, que se puede emplear para la conexión de una unidad periférica T 200M como subordinado en sistemas PROFIBUS-DP redundantes con el sistema de automatización SIMATIC S7-400H.
En muchos campos de la técnica de automatización se plantean requerimientos cada vez más elevados a la disponibilidad y, por lo tanto, a la seguridad contra fallos de los sistemas de automatización. Existen campos, en los que una parada de las instalaciones provocaría costes muy altos. Aquí solamente los sistemas redundantes pueden cumplir los requerimientos planteados a la disponibilidad. Por ejemplo, el sistema SIMATIC S7-400H de alta disponibilidad continúa trabajando también cuando debido a uno o varios fallos, han fallado partes del control. Posee funciones centrales diseñadas redundantes y está constituido con dos aparatos centrales separados como ordenadores de control. Los dos ordenadores de control ejecutan de forma cíclica y sincronizada los mismos programas de procesamiento. Se supervisan mutuamente y establecen de forma automática qué ordenador de control está activo, es decir, que controla realmente el proceso a través de sus datos de salida. A tal fin se intercambian datos a través de un acoplamiento de redundancia entre los dos ordenadores de control. Unas unidades periféricas ET 200M descentralizadas configuradas redundantes, en las que están enchufados, según el caso de aplicación, unos módulos de entrada y de salida, están conectadas en cada caso con un bus de campo PROFIBUS-DP en uno de los ordenadores de control. Las informaciones de entrada del proceso obtenidas con la ayuda de convertidores o de transmisores de medición son transmitidas a través de la unidad periférica a los dos ordenadores de control. Durante el llamado funcionamiento “Hot Stand By”, los dos ordenadores de control ejecutan, en el estado no perturbado, al mismo tiempo el mismo programa de control, pero solamente un ordenador de control está activo, es decir, que solamente los datos de salida de un ordenador de control son procesados en adelante para el control del proceso. En caso de fallo, sólo el aparato intacto asume el control del proceso. A tal fin, los aparatos reciben de forma automática el mismo programa de aplicación, los mismos módulos de datos, los mismos contenidos de la copia del proceso así como los mismos datos internos, como por ejemplo tiempos, contadores, marcadores, etc. De esta manera, ambos aparatos están siempre en el mismo estado actual y en caso de fallo pueden continuar por sí solos en cualquier momento el control. Los datos de salida del proceso, a través de los cuales se predeterminan las señales a emitir a los miembros de control por la unidad periférica, son ofrecidos a la unidad periférica en el caso no perturbado a través de ambos buses de campo, pero solamente evalúa los datos de control recibidos desde uno de los buses de campo. El ordenador de control conectado en cada caso se puede designar, por lo tanto, como el ordenador de control activo.
Con frecuencia, como convertidores de medición se emplean los llamados convertidores de medición de dos conductores que, en función de una variable a detectar, por ejemplo una variable en forma de una temperatura o de una presión, imprimen una corriente de medición a las unidades periféricas en forma de unidades de entrada analógicas. En un sistema redundante, un convertidor de medición de este tipo está conectado con sus conexiones en dos unidades de entrada analógicas, de manera que durante una sustitución condicionada por una reparación de una unidad de entrada analógica, la otra unidad de entrada analógica asume la medición. Para que se pueda realizar una medición continua de este tipo, por ejemplo en las conexiones (entradas de medición) de las unidades de entrada analógica están previstos unos diodos Zener, que se conectan habitualmente fuera de estas unidades, por ejemplo en el llamado plano del cableado en la zona del proceso técnico a controlar. Es especialmente un inconveniente que debido a estos componentes adicionales, el cableado es costoso y la resistencia de carga depende del número de las unidades de entrada analógicas precisamente empleadas, puesto que en un funcionamiento redundante se emplean dos unidades de entrada analógicas, en cambio en el funcionamiento no redundante, por ejemplo durante una sustitución de una unidad de entrada analógica, solamente está en funcionamiento una unidad de entrada analógica. Una resistencia de carga variable es especialmente perturbadora cuando el convertidor de medición debe cumplir los requerimientos según la Especificación HART y deben transmitirse señales HART.
El documento DE 44 15 541 A1 publica un control programable tolerante a fallos con unidades de salida, en el que se proponen medidas para posibilitar un funcionamiento completo tolerante a fallos de una carga.
Un sistema de control redundante de acuerdo con el preámbulo de la reivindicación de la patente se conoce a partir de la publicación “The Design and Application of Redundant Programmable Controllers”, Sykora Mark R., Control Engineering, Nueva York, US. Vol. 29, Nº 8, Julio de 1982, páginas 77 a 79, XP002057993. No se proponen medidas para posibilitar una sustitución de una unidad periférica esencialmente libre de repercusiones con respecto a la resistencia de carga.
La invención tiene el cometido de crear un sistema de control redundante del tipo mencionado al principio, en el que se posibilita la sustitución de una unidad periférica esencialmente libre de repercusiones con respecto a la resistencia de carga. Este cometido se soluciona por medio de las características indicadas en la parte de caracterización de la reivindicación de patente.
Es ventajoso que en el plano del cableado no sean necesarios diodos Zener.
Independientemente de si el sistema de control trabaja en el modo redundante o no redundante, la resistencia de carga es constante. La resistencia de carga se forma por las resistencias de medición conectadas en serie de dos circuitos de medición. En el modo no redundante, los dos circuitos de medición de una unidad periférica están conectados en serie, en el modo redundante, un circuito de medición de una de las dos unidades periféricas está conectado en serie con un circuito de medición de la otra unidad periférica. Con la ayuda del dibujo, en el que se ilustra un ejemplo de realización de la invención, se explican en detalle a continuación la invención, sus configuraciones así como sus ventajas.
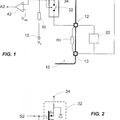
La figura 1 muestra un circuito de conexión de dos unidades periféricas redundantes, y
La figura 2 muestra un sistema de control redundante.
En primer lugar, se remite a la figura 2, en la que se representa un sistema de control redundante conocido en sí. El sistema de control redundante está constituido de acuerdo con un principio 1-de-2 y comprende una primera unidad de redundancia con un primer ordenador de control 1 y una primera unidad periférica 4 y una segunda unidad redundante con un segundo ordenador de control 2 así como una unidad periférica 5. Unos sensores 8, por ejemplo llamados convertidores de medición de dos conductores, detectan señales de proceso de un proceso técnico a controlar, que son leídas por las unidades periféricas 4, 5 a través de líneas 10 y son transmitidas a través de buses 6, 7 en serie o en paralelo adecuados a los ordenadores de control 1, 2 en forma de señales digitales. Los ordenadores de control 1, 2 procesan estas señales en señales de control correspondientes para actuadotes 8, transmitiendo solamente una de las unidades redundantes estas señales de control a los actuadotes 9 a través de una línea 11. Las unidades redundantes trabajan de acuerdo con un modo de Reserva de Maestro, lo que significa que solamente una unidad de redundancia está activa, en cambio la otra está conectada pasiva. Solamente la unidad de redundancia activa controla los actuadotes 9 a través de... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de control redundante con
- un primero y un segundo ordenador de control (1, 2), en los que está conectada en cada caso una unidad periférica (4, 5),
- un convertidor de medición (14) de dos conductores, que está conectado con una primera y con una segunda conexión (15a, 15b, 16a, 16b) en las unidades periféricas (4, 5), en el que el convertidor de medición (14) de dos conductores imprime a las unidades periféricas (4, 5) una corriente de medición en función de una variable a detectar, caracterizado porque
- cada unidad periférica (4, 5) está provista con un primero y con un segundo circuito de medición (12a, 12b, 13a, 13b) para la detección de la corriente de medición, en el que a través de un primer conmutador controlable (17a, 17b) se puede conmutar una línea de alimentación de tensión (VL) a través del primer circuito de medición (12a, 12b) en la primera conexión (15a, 15b) del convertidor de medición (14) de dos conductores y a través de un segundo conmutador controlable (18a, 18b) se puede conmutar un potencial de masa a través del segundo circuito de medición (13a, 13b) en la segunda conexión (16a, 16b) del segundo convertidor de medición (14) de dos conductores, en el que los circuitos de medición (12a, 12b, 13a, 13b) presentan en cada caso una resistencia de medición (R), en el que la resistencia de medición (R) del primer circuito de medición (12a, 12b) está conectada entre el primer conmutador controlable (17a, 17b) y la primera conexión (15a, 15b, 16a, 16b) y la resistencia de medición (R) del segundo circuito de medición (13a, 13b) está conectada entre la segunda conexión (15a, 15b, 16a, 16b) y el segundo conmutador controlable (18a, 18b)
- en un modo de funcionamiento redundante, el primer circuito de medición (12a, 12b) de una unidad periférica (3, 5) está conectado en serie con el segundo circuito de medición (13a, 13b) de la otra unidad periférica (4, 5), en el que en función de una señal de control en cada unidad periférica, se evalúa la corriente de medición del primero (12a, 12b) o del segundo (13a, 13b) circuito de medición, y
- en el caso de que una de las unidades periféricas (4, 5) esté perturbada, la corriente de medición circula a través del primero (12a, 12b) y del segundo circuito de medición (13a, 13b) de la otra unidad periférica (4, 5) conectada en un modo de funcionamiento no redundante.
Patentes similares o relacionadas:
 PROCEDIMIENTO DE COMPROBACION DE UN MODULO DE SALIDAS DIGITALES DE UN AUTOMATA PROGRAMABLE Y MODULO QUE UTILIZA ESTE PROCEDIMIENTO, del 22 de Junio de 2010, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento de comprobación del funcionamiento de una vía de un módulo de salidas digitales de un autómata programable, comprendiendo el módulo dos conmutadores […]
PROCEDIMIENTO DE COMPROBACION DE UN MODULO DE SALIDAS DIGITALES DE UN AUTOMATA PROGRAMABLE Y MODULO QUE UTILIZA ESTE PROCEDIMIENTO, del 22 de Junio de 2010, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento de comprobación del funcionamiento de una vía de un módulo de salidas digitales de un autómata programable, comprendiendo el módulo dos conmutadores […]
Dispositivo y método para la transmisión de datos, del 10 de Junio de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo para la transmisión de datos con una interfaz de aparato de medición , una interfaz de control y una interfaz adicional […]
Sistema de extensión de la red PLC, del 22 de Abril de 2020, de LSIS Co., Ltd: Un sistema de extensión de red de PLC, Controlador Lógico Programable, que incluye una base básica y una pluralidad de bases de extensión (200-1, 200-2,..., […]
Controlador lógico programable, del 22 de Abril de 2020, de LSIS Co., Ltd: Un controlador lógico programable, PLC, que tiene una pluralidad de módulos de comunicación, el PLC que comprende: un módulo de control que se […]
Sistema PLC con servidor web y memoria particionada, del 22 de Enero de 2020, de LSIS Co., Ltd: Un sistema de controlador lógico programable (PLC) conectado a una tarjeta de memoria , que comprende: un sistema de archivos configurado para dividir […]
Método para depurar un programa PLC, del 25 de Diciembre de 2019, de LSIS Co., Ltd: Un método para usar un microprocesador de propósito general para depurar un controlador lógico programable, PLC, el método comprende: recibir en una unidad de procesamiento […]
Aparato para la gestión de programas de controlador lógico programable, del 27 de Noviembre de 2019, de LSIS Co., Ltd: Un aparato para la gestión de programas de PLC, controlador lógico programable, el aparato que comprende: un medio de compilación configurado […]
Método de compilación óptima de un comando de PLC, del 27 de Noviembre de 2019, de LSIS Co., Ltd: Un método para compilar un comando de PLC, controlador lógico programable, el método que comprende: elegir un esquema de procesamiento de compilación de una pluralidad […]