Sistema de colocación para injerto bifurcado.
Sistema de colocación (10) para un dispositivo intracorpóreo expansible,
comprendiendo el sistema decolocación (10)
un árbol alargado (12) que tiene una sección proximal (13) y una sección distal (14) comprendiendo lasección distal (14):
un elemento de soporte de correa alargado (17) dispuesto adyacente a una parte de la sección distal(14) configurado para alojar un dispositivo intracorpóreo expansible;
al menos una correa (21) sujeta al elemento de soporte de correa (17) que está configurada paradisponerse de manera circunferencial alrededor del dispositivo intracorpóreo expansible para restringirel dispositivo intracorpóreo expansible; y
un elemento de liberación (24) que sujeta de manera liberable la al menos una correa (21) en laconfiguración de restricción,
caracterizado porque el elemento de soporte de correa (17) comprende un tubo de hilo guía.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2002/011522.
Solicitante: TRIVASCULAR, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 3910 BRICKWAY BOULEVARD SANTA ROSA, CA 95403 ESTADOS UNIDOS DE AMERICA.
Inventor/es: CHOBOTOV, MICHAEL, V., GLYNN,BRIAN A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61F2/06 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00). › Vasos sanguíneos.
PDF original: ES-2401568_T3.pdf
Fragmento de la descripción:
Sistema de colocación para injerto bifurcado
Campo técnico La presente invención se refiere en general a un sistema para el tratamiento de trastornos de la vasculatura. Más específicamente, a un sistema para el tratamiento de aneurismas aórticos abdominales o torácicos y similares, que es un estado manifestado por la expansión y el debilitamiento de la aorta.
Técnica anterior
Los métodos anteriores de tratamiento de aneurismas han consistido en métodos quirúrgicos invasivos con colocación de injerto dentro del vaso afectado como elemento de refuerzo de la arteria. Sin embargo, un procedimiento de este tipo requiere una incisión quirúrgica para acceder al vaso, que a su vez puede dar como resultado una ruptura catastrófica del aneurisma debido a la presión externa disminuida de los órganos y tejidos circundantes, que se mueven durante el procedimiento para acceder al vaso. Por consiguiente, los procedimientos quirúrgicos pueden tener una alta tasa de mortalidad debido a la posibilidad de la ruptura comentada anteriormente además de otros factores. Otros factores de riesgo para el tratamiento quirúrgico de aneurismas aórticos pueden incluir el mal estado físico del paciente debido a pérdida de sangre, anuria y baja tensión arterial asociada con el aneurisma abdominal aórtico. Un ejemplo de un procedimiento quirúrgico se describe en un libro titulado Surgical Treatment of Aortic Aneur y sms de Cooley publicado en 1986 por W.B. Saunders Company.
Debido a los riesgos y complejidades inherentes de la intervención quirúrgica, se han realizado diversos intentos para desarrollar métodos alternativos para el despliegue de injertos dentro de aneurismas aórticos. Un método de este tipo es la técnica no invasiva de colocación percutánea mediante un sistema basado en catéter. Un método de este tipo se describe en Lawrence, Jr. et al. en “Percutaneous endovascular graft: experimental evaluation”, Radiology (mayo de 1987) . Lawrence describió en el mismo el uso de una endoprótesis de Gianturco tal como se da a conocer en la patente estadounidense n.º 4.580.568. La endoprótesis se usa para colocar un injerto de material textil de Dacron dentro del vaso. El injerto de Dacron está comprimido dentro del catéter y luego se despliega dentro del vaso que va a tratarse. Mirich et al. también han descrito un procedimiento similar en “Percutaneously placed endovascular grafts for aortic aneur y sms: feasibility study, ” Radiology (marzo de 1989) . Mirich describe en el mismo una estructura metálica de autoexpansión cubierta por un material textil de nailon, anclándose dicha estructura mediante espigas en los extremos proximal y distal.
Una de las principales deficiencias de los dispositivos y métodos percutáneos existentes ha sido que los injertos y los sistemas de colocación usados para colocar los injertos son de perfil relativamente grande, a menudo de hasta 24 French, y rígidos en la curvatura longitudinal. El gran perfil y la rigidez a la curvatura relativamente alta de los sistemas de colocación existentes dificulta la colocación a través de los vasos de un paciente y puede suponer el riesgo de disección u otro traumatismo en los vasos del paciente. En particular, las arterias ilíacas de un paciente a menudo son demasiado estrechas o irregulares para el paso de dispositivos percutáneos existentes. Debido a esto, la colocación no invasiva de injerto percutáneo para el tratamiento de aneurisma aórtico está contraindicada para muchos pacientes que de otro modo se beneficiarían de ello.
Lo que se necesita es un injerto endovascular y un sistema de colocación que tenga un diámetro exterior pequeño en relación con los sistemas existentes y una alta flexibilidad para facilitar la colocación percutánea en pacientes que requieren tal tratamiento. Lo que se necesita también es un sistema de colocación para un injerto endovascular que sea sencillo, fiable y que pueda desplegar de manera precisa y segura un injerto endovascular dentro de un vaso, lumen o cuerpo del paciente.
La publicación de solicitud de patente internacional número WO 00/13613 describe un sistema para colocar endoprótesis de bifurcación. El sistema de despliegue de endoprótesis incluye un elemento tubular que tiene un primer extremo y un segundo extremo y un agujero generalmente longitudinal entre los extremos primero y segundo. El elemento tubular tiene una periferia interior dimensionada para alojar una endoprótesis en la misma. Una pluralidad de agujeros están dispuestos en lados opuestos de la abertura generalmente longitudinal. Un elemento de retención alargado puede alojarse de manera retirable dentro de las aberturas para retener la endoprótesis en el elemento tubular y para liberar la endoprótesis del elemento tubular cuando se retira de las aberturas.
Descripción de la invención La invención se refiere en general a un sistema de colocación para colocar un dispositivo intracorpóreo expansible, específicamente, un injerto endovascular. Las realizaciones mostradas en el presente documento se refieren a la colocación percutánea no invasiva de injertos endovasculares que elimina la necesidad de una incisión quirúrgica con el fin de acceder a la arteria afectada o a otro conducto intracorpóreo del paciente que está tratándose. Un sistema de colocación no invasivo de este tipo da como resultado una duración de procedimiento más corta, tiempos de recuperación acelerados y menor riesgo de complicación. Las propiedades de perfil bajo flexible de algunas realizaciones mostradas en el presente documento también dan lugar a procedimientos percutáneos no invasivos para la colocación de injertos endovasculares disponibles para poblaciones de pacientes que no pueden disponer de tal tratamiento de otro modo. Por ejemplo, en pacientes con anatomías pequeñas o vasculatura particularmente sinuosa pueden estar contraindicados los procedimientos que implican el uso de sistemas de colocación que no tienen las características flexibles o de bajo perfil de realizaciones mostradas en el presente documento.
Según un primer aspecto de la presente invención, se proporciona un sistema de colocación para un dispositivo intracorpóreo expansible, comprendiendo el sistema de colocación, un árbol alargado que tiene una sección proximal y una sección distal comprendiendo la sección distal, un elemento de soporte de correa alargado dispuesto adyacente a una parte de la sección distal configurado para alojar un dispositivo intracorpóreo expansible; al menos una correa sujeta al elemento de soporte de correa y que está configurada para disponerse de manera circunferencial alrededor del dispositivo intracorpóreo expansible para restringir los dispositivos intracorpóreos expansibles; y un elemento de liberación que sujeta de manera liberable la al menos una correa en la configuración de restricción, caracterizado porque el elemento de soporte de correa comprende un tubo de hilo guía. Otras características preferidas de la presente invención se explican en las reivindicaciones adjuntas.
Breve descripción de los dibujos Los objetos, ventajas y características de esta invención se apreciarán más fácilmente a partir de la siguiente descripción detallada, cuando se lea conjuntamente con los dibujos adjuntos; en los que:
La figura 1 es una vista en alzado en sección longitudinal parcial que ilustra una realización de un sistema de colocación para un dispositivo intracorpóreo expansible que tiene características de la invención.
La figura 2 es una vista en sección transversal del sistema de colocación de la figura 1 tomada a lo largo de las líneas 2-2 de la figura 1.
La figura 3 es una vista en sección transversal del sistema de colocación de la figura 1 tomada a lo largo de las líneas 3-3 de la figura 1.
La figura 4 es una vista en sección transversal del sistema de colocación de la figura 1 tomada a lo largo de las líneas 4-4 de la figura 1.
La figura 5 es una vista en sección transversal del sistema de colocación de la figura 1 tomada a lo largo de las líneas 5-5 de la figura 1.
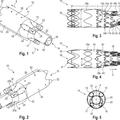
La figura 6A es una vista en alzado ampliada en sección parcial del sistema de colocación en la figura 1.
La figura 6B es una vista en alzado ampliada en sección parcial del sistema de colocación de la figura 1 con partes del injerto y elementos de autoexpansión eliminados por claridad de la vista de los casquillos de correa.
La figura 7A es una vista en perspectiva que muestra configuraciones de correa de liberación que tienen características de la invención.
La figura 7B es una vista en perspectiva que muestra una realización alternativa de correas de liberación.
La figura 7C es una vista... [Seguir leyendo]
Reivindicaciones:
1. Sistema de colocación (10) para un dispositivo intracorpóreo expansible, comprendiendo el sistema de colocación (10)
un árbol alargado (12) que tiene una sección proximal (13) y una sección distal (14) comprendiendo la sección distal (14) :
un elemento de soporte de correa alargado (17) dispuesto adyacente a una parte de la sección distal
(14) configurado para alojar un dispositivo intracorpóreo expansible;
al menos una correa (21) sujeta al elemento de soporte de correa (17) que está configurada para disponerse de manera circunferencial alrededor del dispositivo intracorpóreo expansible para restringir el dispositivo intracorpóreo expansible; y
un elemento de liberación (24) que sujeta de manera liberable la al menos una correa (21) en la configuración de restricción,
caracterizado porque el elemento de soporte de correa (17) comprende un tubo de hilo guía.
2. Sistema de colocación según la reivindicación 1, en el que la correa (21) comprende al menos una longitud de hilo que tiene un primer extremo (55) y un segundo extremo (56) .
3. Sistema de colocación según la reivindicación 2, en el que la al menos una longitud de hilo está configurada en al menos un bucle (81) sujetándose cada uno de dichos extremos de hilo primero y segundo (55, 56) al elemento de soporte de correa.
4. Sistema de colocación según la reivindicación 2 ó 3, en el que el hilo comprende una aleación con memoria de forma.
5. Sistema de colocación según una cualquiera de las reivindicaciones 2 a 4, en el que el hilo comprende níquel-titanio.
6. Sistema de colocación según cualquier reivindicación anterior, en el que el elemento de liberación comprende un hilo de liberación (24) sujeto de manera liberable dentro de extremos de bucle de la correa (21) .
7. Sistema de colocación según la reivindicación 6, en el que el hilo de liberación (24) está dispuesto de manera móvil dentro de extremos en bucle opuestos de la correa (21) .
8. Sistema de colocación según cualquier reivindicación anterior, en el que la correa (21) en la configuración de restricción forma un plano que es sustancialmente ortogonal a un eje longitudinal del árbol alargado (12) .
9. Sistema de colocación según cualquier reivindicación anterior, comprendiendo el sistema de colocación (10) una pluralidad de dichas correas (21, 22, 23) .
10. Sistema de colocación según la reivindicación 9, en el que al menos dos de dichas correas (21, 22) están configuradas para poderse liberar mediante el mismo elemento de liberación (24) .
11. Sistema de colocación según la reivindicación 9, en el que todas dichas correas están configuradas para poderse liberar mediante el mismo elemento de liberación.
12. Sistema de colocación según la reivindicación 10, estando configurado el sistema (10) de manera que el orden en que se liberan las al menos dos correas (21, 22) está determinado por la posición axial de las al menos dos correas (21, 22) y la dirección de movimiento de dicho mismo elemento de liberación (24) .
13. Sistema de colocación según la reivindicación 12, en el que dicho mismo elemento de liberación comprende un hilo de liberación (24) dispuesto de manera móvil dentro de extremos de bucle opuestos de cada correa (21, 22) y estando configurado el sistema de colocación (10) de manera que la correa más distal (21) se liberará por primera vez cuando un extremo distal del hilo de liberación (24) se retrae en una dirección proximal para moverse más allá del extremo de bucle opuesto de la correa más distal (21) , y las correas
(22) ubicadas de manera más proximal se liberan secuencialmente después cuando el extremo distal del hilo de liberación (24) pasa por los extremos de bucle opuestos respectivos de las mismas.
14. Sistema de colocación según una cualquiera de las reivindicaciones 9 a 13, que comprende una pluralidad de elementos de liberación en el que al menos una parte del extremo proximal de al menos dos de los
elementos de liberación son de colores diferentes.
15. Sistema de colocación según la reivindicación 14, en el que los elementos de liberación comprenden asideros de hilo de liberación (93, 94) sujetos a extremos proximales de hilos de liberación (24, 25) y al menos una parte de al menos dos de los asideros de hilo de liberación (93, 94) son de colores diferentes.
16. Sistema de colocación según una cualquiera de las reivindicaciones 9 a 15, que comprende además una pluralidad de elementos de liberación (24, 25) en el que los extremos proximales de los elementos de liberación (24, 25) están en una configuración espacial lineal en un extremo proximal del sistema de colocación (10) que corresponde a un orden de despliegue deseado para la pluralidad de correas (21, 22, 23) .
17. Sistema de colocación según una cualquiera de las reivindicaciones 9 a 16, en el que el o cada elemento de liberación comprende un hilo de liberación ramificado (150) .
18. Sistema de colocación según cualquier reivindicación anterior, estando configurado el sistema (10) para su uso con un dispositivo intracorpóreo que tiene una parte de cuerpo tubular.
19. Sistema de colocación según una cualquiera de las reivindicaciones 1 a 18, estando configurado el sistema
(10) para su uso con un dispositivo intracorpóreo bifurcado.
20. Sistema de colocación según cualquier reivindicación anterior, proporcionado en combinación con dicho dispositivo intracorpóreo.
Patentes similares o relacionadas:
 Procedimiento y dispositivo para producir un objeto multicelular tridimensional, del 29 de Julio de 2020, de TECHNISCHE UNIVERSITAT BERLIN: Procedimiento para producir un objeto multicelular tridimensional, con los pasos siguientes:
a) introducción de un primer líquido fotopolimerizable […]
Procedimiento y dispositivo para producir un objeto multicelular tridimensional, del 29 de Julio de 2020, de TECHNISCHE UNIVERSITAT BERLIN: Procedimiento para producir un objeto multicelular tridimensional, con los pasos siguientes:
a) introducción de un primer líquido fotopolimerizable […]
Tapón de catéter extraíble y aplicaciones del mismo, del 3 de Junio de 2020, de Pristine Access Technologies Ltd: Tapón de catéter extraíble , que comprende: un cuerpo de tapón configurado para […]
Dispositivos de cierre automático, del 29 de Abril de 2020, de Solinas Medical Inc: Un puerto de acceso que se puede unir a una superficie dentro del cuerpo de un paciente, que comprende: un cuerpo del puerto que comprende un material […]
Dispositivo para el tratamiento del aneurisma de aorta, del 21 de Abril de 2020, de SERVICIO ANDALUZ DE SALUD: Dispositivo para el tratamiento del aneurisma de aorta. La invención describe un dispositivo para el tratamiento del aneurisma de aorta que comprende: un estent exterior […]
Endoprótesis y dispositivo de colocación para implantar tal endoprótesis, del 15 de Abril de 2020, de Kardiozis: Stent vascular o stent cardiaco que comprende al menos una parte de cuerpo, en el que están dispuestos elementos trombogénicos al menos […]
Dispositivos para tratar la vasculatura de la extremidad inferior, del 12 de Febrero de 2020, de LimFlow GmbH: Un sistema de prótesis implantable para tratar una oclusión en un primer vaso, el sistema de prótesis comprende: un estent (100, 134, 140, 150, 160, 200, 220, […]
 Prótesis vascular autoexpandible, del 29 de Enero de 2020, de JOTEC GMBH: Prótesis vascular autoexpandible para la implantación en un vaso sanguíneo de un paciente, con un cuerpo de base cilíndrico hueco , así […]
Prótesis vascular autoexpandible, del 29 de Enero de 2020, de JOTEC GMBH: Prótesis vascular autoexpandible para la implantación en un vaso sanguíneo de un paciente, con un cuerpo de base cilíndrico hueco , así […]
Dispositivo de protección de microválvula, del 22 de Enero de 2020, de Surefire Medical, Inc: Un dispositivo endovascular para reducir el reflujo de un agente de embolización en un vaso durante un procedimiento de terapia de embolización, comprendiendo […]