SISTEMA DE CONTROL SIN SENSORES DE POSICIÓN PARA MOTOR ELÉCTRICO SIMULTÁNEO.
Un sistema de control (CS), sin sensores de posición, para un motor (M) eléctrico giratorio simultáneo,
que comprende: un conmutador electrónico (TR) conectado de forma operativa en serie a un devanado inductor (W) del motor (M) entre un primer terminal y un segundo terminal (A, B) que están destinados a conectarse a un suministro de voltaje alterno (V), unos primeros medios de detector (1) adecuados para proporcionar una señal eléctrica (VZC) indicativos del signo y de los pasos a cero del voltaje de suministro alterno (V), unos segundos medios de detector (2, 3) adecuados para proporcionar señales indicativas del signo y de los pasos a cero de la fuerza contraelectromotriz que se desarrolla en el devanado inductor (W) en funcionamiento, y unos medios de control (MC) conectados al conmutador electrónico (TR) y a los primeros y los segundos medios de detector (1; 2, 3) y dispuestos para dar lugar al inicio de la rotación del rotor (R), empezando desde una posición inicial predeterminada (θ0), de acuerdo con un procedimiento que comprende los pasos de: a) conducción del conmutador electrónico (TR) de forma que para dar lugar al paso a través del devanado inductor (W) de un primer pulso de corriente (I1) que empieza por un retraso predeterminado inicial (t1) relativo al paso a cero inmediatamente anterior del voltaje de suministro (V), b) comprobación de si la fuerza contraelectromotriz (E) desarrollada por consiguiente en el devanado inductor (W) tiene un paso a cero en un período predeterminado de tiempo (T) que precede inmediatamente al tercer paso a cero del voltaje de suministro (V) después del inicio del primer pulso de corriente (I1), c) cuando la comprobación mencionada anteriormente proporciona un resultado positivo, la conducción del conmutador electrónico (TR) de forma que dé como resultado el paso a través del devanado inductor (W) de un segundo pulso de corriente (I2) de signo o dirección opuestos al primero (I1), con un segundo retraso predeterminado (t2) relativo al tercer paso a cero del voltaje de suministro (V), y proporcionando a continuación al devanado (W) un voltaje en la frecuencia del suministro, y d) cuando la comprobación proporciona un resultado negativo, repitiendo el procedimiento del paso a) indicado anteriormente desde el principio, reduciendo la duración del primer retraso (t1) si el primer paso a cero de la fuerza contraelectromotriz (E) tuvo lugar después del período de tiempo (T), e incrementando la duración del primer retraso (t1) si el primer paso a cero de la fuerza contraelectromotriz (E) tuvo lugar antes del período de tiempo (T)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2008/052501.
Solicitante: ASKOLL P&C S.R.L.
Nacionalidad solicitante: Italia.
Dirección: VIA VITTIME DEL VAJONT 29/31/33 10024 MONCALIERI (TO) ITALIA.
Inventor/es: ACQUAVIVA, SEBASTIANO, RICCO,Piergiorgio.
Fecha de Publicación: .
Fecha Solicitud PCT: 24 de Junio de 2008.
Clasificación Internacional de Patentes:
- H02P1/46B
- H02P27/02B
- H02P6/00S
- H02P6/18E
Clasificación PCT:
- H02P1/46 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 1/00 Disposiciones para arrancar motores eléctricos o convertidores dinamoeléctricos (arranque de motores síncronos con conmutadores electrónicos H02P 6/20, H02P 6/22; arranque de motores dínamoeléctricos que giran paso a paso H02P 8/04; control vectorial H02P 21/00). › para hacer arrancar individualmente un motor síncrono.
- H02P27/02 H02P […] › H02P 27/00 Disposiciones o métodos para el control de motores de corriente alterna caracterizados por la clase de voltaje de alimentación (de dos o más motores H02P 5/00; de motores síncronos con conmutadores electrónicos H02P 6/00; de motores de corriente continua H02P 7/00; de motores paso a paso H02P 8/00). › utilizando tensión de alimentación con frecuencia constante y amplitud variable.
- H02P6/00 H02P […] › Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00).
- H02P6/18 H02P […] › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › sin elementos separados para detectar la posición.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2360843_T3.pdf
Fragmento de la descripción:
La presente invención hace referencia a un sistema, sin sensores de posición, que permite controlar la rotación del rotor de un motor eléctrico simultáneo. Dicho sistema se muestra en el documento EP 0945973.
Uno de los objetivos de la presente invención consiste en proporcionar un sistema de control de este tipo que es sencillo y económico en cuanto a la producción y seguro en cuanto al funcionamiento.
Este y otros objetivos se logran, según la invención, por medio de un sistema de control sin sensores de posición para un motor eléctrico giratorio simultáneo, cuyas características principales se definen en la reivindicación 1.
Otras características y ventajas adicionales de la invención se mostrarán con mayor claridad en la siguiente descripción detallada que se proporciona íntegramente a título de ejemplo no limitativo con referencia a las imágenes anexas, en las que:
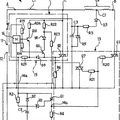
La Figura 1 es un diagrama eléctrico, parcialmente en forma de bloque, de un sistema de control para un motor eléctrico simultáneo según la presente invención,
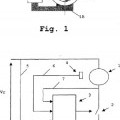
La Figura 2 es una vista parcial del sistema de control del motor que muestra claramente un circuito equivalente al devanado inductor,
La Figura 3 es un gráfico que muestra ejemplos de curvas de cantidades eléctricas en el sistema de la Figura 1 durante una fase de posicionamiento inicial del rotor del motor,
La Figura 4 muestra de forma esquemática una posición inicial del rotor del motor,
La Figura 5 es un gráfico que muestra otro ejemplo de una curva de la corriente del motor de la Figura 1 en una fase inicial de movimiento del rotor, y
La Figura 6 es una serie de gráficos que muestran curvas de cantidades eléctricas y mecánicas y de señales desarrolladas durante la fase del inicio de la rotación del motor bajo el control del sistema de control según la invención.
Un motor eléctrico simultáneo, por ejemplo, un motor para una bomba de lavavajillas, se indica generalmente como M en la Figura 1.
El motor M comprende un rotor R con imanes permanentes y un inductor S que incluye un devanado W.
Estructuralmente, el motor M puede ser del tipo que se ilustra y se describe, por ejemplo, en la solicitud de patente europea EP 0 207 430 A1 o en la patente europea EP 0 851 570 B1.
Un sistema de control, generalmente indicado como CS, está asociado al motor M. En concreto, el sistema no tiene sensores de posición asociados al rotor R del motor M.
El sistema de control CS comprende un conmutador electrónico que, en la realización mostrada, es un triac TR que se conecta en serie con el devanado W del motor M entre dos terminales A y B que están destinados a conectarse a un suministro de voltaje de corriente alterna V como la red de distribución de electricidad normal de 50 (60) Hz.
El triac TR tiene su compuerta G conectada a una salida de un microcontrolador MC.
El sistema de control CS comprende además un primer circuito detector 1 adecuado para suministrar al microcontrolador MC una señal indicativa del signo y de los pasos a cero del voltaje de suministro V. El signo del voltaje de suministro hace referencia a su polaridad que se presupone de forma convencional que es positiva cuando el terminal A está en un potencial más elevado que el terminal B.
La Figura 6 muestra, en el gráfico superior, la curva del voltaje de suministro V y, en el gráfico que aparece inmediatamente debajo del mismo, la curva correspondiente de la señal VZC suministrada por el circuito detector 1. En resumen, cuando VZC está en un nivel “alto” (+5V), el voltaje de suministro V es positivo. Además, las transiciones de VZC del nivel “alto” al nivel “bajo” (0V) y viceversa corresponden a los pasos a cero del voltaje de suministro V.
El sistema de control CS también puede comprender un segundo circuito detector, indicado como 2. Este circuito es un detector de voltaje y tiene su entrada conectada a los terminales del devanado inductor W y su salida conectada al microcontrolador MC.
Como se muestra con mayor claridad en la siguiente descripción, en determinadas condiciones de funcionamiento, el voltaje de los terminales del devanado inductor W del motor M es representativo de la intensidad de la fuerza contraelectromotriz (BEMF) desarrollada en dicho devanado mientras que, en otras condiciones, el voltaje corresponde al voltaje de suministro V.
El sistema de control CS comprende además un tercer circuito detector 3 que tiene su entrada conectada entre el devanado inductor W y el triac TR y su salida conectada al microcontrolador MC. Este detector puede suministrar una señal indicativa de cuando la corriente I que fluye de forma operativa en el devanado inductor W es cero.
Los circuitos detectores 1, 2 y 3 pueden estar de forma opcional parcial o completamente integrados en el microcontrolador MC.
Por último, un suministro de energía de corriente directa, indicado como PS en la Figura 1, está conectado entre los terminales de suministro A y B para que un voltaje de suministro de corriente directa VCC esté disponible de forma operativa. El suministro de energía PS crea de forma interna una referencia de tierra GND para el sistema de control CS.
El microcontrolador MC está dispuesto para activar el triac TR de forma que, cuando el motor M esté funcionando en el estado de ejecución estable, el triac TR se haga conductor únicamente cuando el signo
o la dirección de la corriente I que fluye en el devanado W y el signo o la polaridad de la fuerza contraelectromotriz desarrollada en el devanado W sean tales como para satisfacer una relación predeterminada.
En concreto, tras la presunción de que la corriente I es positiva cuando fluye en la dirección indicada por las flechas en las Figuras 1 y 2, y tras la presunción de que el signo de la fuerza contraelectromotriz E es positivo cuando su polaridad positiva está dirigida hacia el terminal de suministro A, el control efectuado por el microcontrolador MC es tal que el triac TR se hace conductor de forma que el signo de la corriente I es el mismo que el signo de la fuerza contraelectromotriz E, que es así, de forma simultánea:
I>0yE>0,oI<0yE<0 (1)
En la Figura 2, el devanado W está representado por su circuito equivalente (circuito equivalente de Thévenin). En esta representación, RW y LW representan la resistencia y la inductancia del devanado W, E representa la fuerza contraelectromotriz desarrollada en el devanado y RF representa la resistencia debido a las pérdidas en el circuito magnético asociado al devanado inductor W.
Con referencia a la Figura 2, si VW indica el voltaje en los terminales del devanado inductor W (cuyo voltaje se aplica en la entrada del circuito detector 2 de la Figura 1) y VTR indica el voltaje de los terminales del triac TR (que se considera que es positivo cuando su polaridad positiva está dirigida hacia el terminal A), tenemos:
VW = V-VTR = RWI+LWdI/dt+E (2)
En la ecuación (2) que aparece arriba se puede ver que, cuando el triac TR no es conductor y la corriente I del motor M es por lo tanto cero (I=0), tenemos:
VW= E = V-VTR (3)
es decir, que el voltaje Vw adquirido en esta situación por el microcontrolador MC por medio del circuito detector 2 representa la intensidad de la fuerza contraelectromotriz E. Por otro lado, cuando el triac TR es conductor, el voltaje VW corresponde esencialmente al voltaje de suministro V.
El sistema de control CS puede por tanto disponerse para adquirir la fuerza electromotriz E, por ejemplo, de la siguiente forma: el circuito detector 3 indica al microcontrolador MC que ha surgido el estado en el que la corriente I es cero y, en ese estado, el microcontrolador MC puede interpretar la señal suministrada por el circuito detector 2 como representativa de la fuerza contraelectromotriz E.
No obstante, se pueden utilizar otros métodos de adquisición/determinación de la fuerza electromotriz E, sin el uso del circuito detector 3.
Tal como se describe arriba, la fuerza contraelectromotriz E se puede adquirir en los períodos de tiempo en los que la corriente I es cero. Como se muestra con mayor claridad en la siguiente descripción, estos períodos se pueden deducir fácilmente de una observación del voltaje VTR en los terminales... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de control (CS), sin sensores de posición, para un motor (M) eléctrico giratorio simultáneo, que comprende:
un conmutador electrónico (TR) conectado de forma operativa en serie a un devanado inductor (W) del motor (M) entre un primer terminal y un segundo terminal (A, B) que están destinados a conectarse a un suministro de voltaje alterno (V),
unos primeros medios de detector (1) adecuados para proporcionar una señal eléctrica (VZC) indicativos del signo y de los pasos a cero del voltaje de suministro alterno (V),
unos segundos medios de detector (2, 3) adecuados para proporcionar señales indicativas del signo y de los pasos a cero de la fuerza contraelectromotriz que se desarrolla en el devanado inductor (W) en funcionamiento, y
unos medios de control (MC) conectados al conmutador electrónico (TR) y a los primeros y los segundos medios de detector (1; 2, 3) y dispuestos para dar lugar al inicio de la rotación del rotor (R), empezando desde una posición inicial predeterminada (θ0), de acuerdo con un procedimiento que comprende los pasos de:
a) conducción del conmutador electrónico (TR) de forma que para dar lugar al paso a través del devanado inductor (W) de un primer pulso de corriente (I1) que empieza por un retraso predeterminado inicial (t1) relativo al paso a cero inmediatamente anterior del voltaje de suministro (V),
b) comprobación de si la fuerza contraelectromotriz (E) desarrollada por consiguiente en el devanado inductor (W) tiene un paso a cero en un período predeterminado de tiempo (T) que precede inmediatamente al tercer paso a cero del voltaje de suministro (V) después del inicio del primer pulso de corriente (I1),
c) cuando la comprobación mencionada anteriormente proporciona un resultado positivo, la conducción del conmutador electrónico (TR) de forma que dé como resultado el paso a través del devanado inductor (W) de un segundo pulso de corriente (I2) de signo o dirección opuestos al primero (I1), con un segundo retraso predeterminado (t2) relativo al tercer paso a cero del voltaje de suministro (V), y proporcionando a continuación al devanado (W) un voltaje en la frecuencia del suministro, y
d) cuando la comprobación proporciona un resultado negativo, repitiendo el procedimiento del paso a) indicado anteriormente desde el principio, reduciendo la duración del primer retraso (t1) si el primer paso a cero de la fuerza contraelectromotriz (E) tuvo lugar después del período de tiempo (T), e incrementando la duración del primer retraso (t1) si el primer paso a cero de la fuerza contraelectromotriz (E) tuvo lugar antes del período de tiempo (T).
2. Un sistema de control según la Reivindicación 1 en el que los medios de control (MC) también se disponen para dirigir el conmutador electrónico (TR) de forma que para dar lugar al paso a través del devanado inductor (W), después del segundo pulso de corriente (I2), de una corriente alterna que es isofrecuencial con el voltaje de suministro (V) y que tiene partes positivas alternativamente (I+) y partes negativas (I-) separadas por períodos de duración predeterminada (t3), que puede ser cero de forma opcional, en el que la corriente sigue siendo cero.
3. Un sistema de control según la Reivindicación 1 o la Reivindicación 2 en el que el primer retraso (t1) y el segundo retraso (t2) se determinan de acuerdo con funciones en aumento predeterminadas del valor instantáneo, detectado o calculado, del voltaje de suministro (V).
4. Un sistema de control según la Reivindicación 3 en el que el segundo retraso (t2) se determina de acuerdo con una función en aumento predeterminada del retraso del primer paso a cero de la fuerza electromotriz (E) relativa al paso a cero inmediatamente anterior del voltaje de suministro (V).
5. Un sistema de control según la Reivindicación 2 en el que los períodos en los que la corriente (I) sigue siendo cero tienen una duración (t3) que es una función en aumento predeterminada del valor
instantáneo, detectado o calculado, del voltaje de suministro (V) y de la carga.
6. Un sistema de control según cualquiera de las reivindicaciones anteriores en el que los segundos medios de detector (2, 3) comprenden un primer circuito detector (2) adecuado para proporcionar una señal indicativa del voltaje (VW) que existe entre los terminales del devanado (W) en funcionamiento, y un segundo circuito detector (3) adecuado para proporcionar una señal indicativa del momento en el que la corriente (I) que fluye en el devanado es cero.
7. Un sistema de control según cualquiera de las reivindicaciones anteriores e el que los medios de control (MC) también están dispuestos para implementar, antes del inicio de la rotación del rotor (R), un procedimiento de preposicionamiento del rotor (R) en una posición angular inicial predeterminada (θ0), y en el que, al principio del procedimiento, el voltaje de suministro (V) se aplica con un signo o una polaridad inicial predeterminada y, a continuación, después de que haya transcurrido un período de tiempo predeterminado, el conmutador electrónico (TR) se conecta en repetidas ocasiones, un número predeterminado de veces (na), cada vez con un retraso predeterminado (ta) después de que el último paso a cero del voltaje (V) hacia el signo o la polaridad predeterminada y mientras que el voltaje (V) tiene el signo o la polaridad predeterminada, de forma que un número correspondiente (na) de pulsos de corriente que tienen todos el mismo signo o dirección se suministren al devanado (W).
8. Un sistema de control según la Reivindicación 7 en el que los medios de control (MC) se disponen para implementar, antes del procedimiento para el preposicionamiento del rotor (R), un procedimiento o una fase para comprobar que el rotor (R) puede rotar.
9. Un sistema de control según la Reivindicación 8 en el que, en el procedimiento o la fase de comprobación de que el rotor (R) puede rotar, los medios de control (MC) aplican al devanado inductor
(W) una serie de pulsos de corriente unidireccional (np) seguidos de un pulso de corriente de comprobación (Iprueba1) del signo o la dirección opuestos para los pulsos anteriores, con un retraso predeterminado (td) relativo al último paso a cero del voltaje de suministro (V).
10. Un sistema de control según la Reivindicación 9 en el que, en el procedimiento o la fase de comprobación de que el rotor (R) puede rotar, después del pulso de corriente de comprobación (Iprueba1), los medios de control (MC) aplican al devanado inductor (W) un número adicional (nq) de pulsos de corriente que tienen el mismo signo o dirección que el pulso de comprobación (Iprueba1) y, a continuación, con un retraso predeterminado adicional (te), un pulso de comprobación final (Iprueba2) del signo o la dirección opuestos al primer pulso de comprobación (Iprueba1).
11. Un sistema de control según la Reivindicación 9 o la Reivindicación 10 en el que los medios de control (MC) se disponen para comprobar, por medio de los segundos medios de detector (2, 3), si una fuerza contraelectromotriz (E) se desarrolla en el devanado inductor (W) como resultado del/de los pulso/s de corriente de comprobación (Iprueba1, Iprueba2).
Patentes similares o relacionadas:
 DISPOSITIVO DE CONTROL PARA UN MOTOR SINCRONO DE IMAN PERMANENTE, del 27 de Mayo de 2010, de ASKOLL P&C S.R.L: Dispositivo de circuito de control para un motor eléctrico síncrono con un rotor de imán permanente con el que están asociados medios […]
DISPOSITIVO DE CONTROL PARA UN MOTOR SINCRONO DE IMAN PERMANENTE, del 27 de Mayo de 2010, de ASKOLL P&C S.R.L: Dispositivo de circuito de control para un motor eléctrico síncrono con un rotor de imán permanente con el que están asociados medios […]
 DISPOSITIVO ELECTRÓNICO PARA EL CONTROL DE UN MOTOR SÍNCRONO CON ROTOR DE IMÁN PERMANENTE, del 22 de Junio de 2011, de COPRECITEC, S.L.: Dispositivo electrónico para el control de un motor síncrono con rotor de imán permanente, que comprende: una fuente de tensión alterna a la […]
DISPOSITIVO ELECTRÓNICO PARA EL CONTROL DE UN MOTOR SÍNCRONO CON ROTOR DE IMÁN PERMANENTE, del 22 de Junio de 2011, de COPRECITEC, S.L.: Dispositivo electrónico para el control de un motor síncrono con rotor de imán permanente, que comprende: una fuente de tensión alterna a la […]
MÁQUINA QUIRÚRGICA Y PROCEDIMIENTO PARA EL CONTROL Y/O LA REGULACIÓN DE UNA MÁQUINA QUIRÚRGICA, del 13 de Julio de 2011, de AESCULAP AG: Máquina quirúrgica con un motor eléctrico sin sensores, que presenta un rotor y al menos dos devanados del motor, y con un control del motor […]
MÉTODO DE CONTROL DE UN MOTOR ELÉCTRICO DE CONMUTACIÓN MECÁNICA, del 27 de Junio de 2011, de IDEASSOCIATES (IOM) LIMITED: Método para controlar un motor eléctrico de conmutación mecánica , en donde el ángulo rotativo de la salida de dicho motor se determina […]
Sistema inversor, del 6 de Noviembre de 2019, de LSIS Co., Ltd: Un sistema inversor que comprende: un inversor configurado para recibir potencia de CA de la red pública y aumentarla a una potencia de […]
Método y aparato para controlar un motor síncrono de imán permanente de un dispositivo de aire acondicionado, del 11 de Septiembre de 2019, de Hisense (Shandong) Air-conditioning Co., Ltd: Un dispositivo de aire acondicionado, que comprende: un módulo de almacenamiento de parámetros que almacena los parámetros iniciales del motor […]
Aparato de excitación de carga para unidad exterior de un acondicionador de aire y método para excitar la carga, del 5 de Junio de 2019, de DAIKIN INDUSTRIES, LTD.: Un dispositivo para excitar una carga que comprende un primer y segundo motores en una unidad exterior de un acondicionador de aire, en el que dicho primer motor […]
Procedimiento para hacer funcionar un dispositivo de trabajo con un motor eléctrico y dispositivo de trabajo con un motor eléctrico, del 22 de Mayo de 2019, de ANDREAS STIHL AG & CO. KG: Dispositivo de trabajo con una herramienta accionada por un motor eléctrico , en el que el motor eléctrico está conectado a una fuente de energía […]