Sistema de control de la ablación de la córnea de un ojo por medio de un láser.
Sistema (10) para la ablación de córnea en un ojo (12) con:
- un láser (14) que emite pulsos láser,
- un dispositivo de apuntamiento (16) para la orientación precisa de los pulsos láser sobre la córnea del ojo,
- un rastreador ocular (20) que registra dos coordenadas de la posición del centro de la pupila del ojo y transmite al dispositivo de apuntamiento datos de entrada para la realización de una posición base, donde el dispositivo de apuntamiento comprende un dispositivo de computación (18) que está diseñado para corregir las dos coordenadas registradas por el rastreador ocular (20),
caracterizado porque
la unidad de computación está diseñada para corregir las coordenadas xFS, ET e yFS, ET, registradas antes del disparo de un primer pulso láser por el rastreador ocular (20), por un primer factor constante k1 con 1,0 ≤ k1 ≤ 1,2 a xFS, korr = k1 · xFS, ET, yFS, korr = k1 · yFS, ET y para corregir, antes de la realización de otros disparos láser, las coordenadas xLS, ET, yLS, ET registradas entonces por el rastreador ocular (20), conforme a con el factor constante k2 , siendo 1,2 ≤ k 2 ≤ 1,5 y k2≥k1, de tal manera que el dispositivo de apuntamiento (16) compensa exactamente, en la posición base, una desviación que ha sido originada por un movimiento del ojo y que queda cuantificada por las coordenadas corregidas.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06023259.
Solicitante: Schwind eye-tech-solutions GmbH & Co. KG.
Nacionalidad solicitante: Alemania.
Dirección: Mainparkstrasse 6 - 10 63801 Kleinostheim ALEMANIA.
Inventor/es: Arba-Mosquera,Samuel, Magnago,Thomas.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B3/113 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 3/00 Aparatos para el examen óptico o clínico de los ojos; Instrumentos para examinar los ojos (examen ocular utilizando ondas ultrasónicas, sónicas o infrasónicas A61B 8/10). › para determinar o registrar el movimiento del ojo.
- A61F9/01 A61 […] › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 9/00 Métodos o dispositivos para el tratamiento de los ojos; Dispositivos para colocar las lentes de contacto; Dispositivos para corregir el estrabismo; Aparatos para guiar a los ciegos; Dispositivos protectores de los ojos que se llevan sobre el cuerpo o en la mano (gorras con medios para la protección de los ojos A42B 1/0181; viseras para cascos A42B 3/22; baños para los ojos A61H 35/02; gafas de sol o de protección con las mismas características que las gafas normales G02C). › Tratamiento de la córnea.
PDF original: ES-2380673_T3.pdf
Fragmento de la descripción:
Sistema de control de la ablación de la córnea de un ojo por medio de un láser La invención se refiere a un sistema para la ablación de córnea en un ojo según el preámbulo de la reivindicación 1. Un sistema de este tipo es conocido por el documento WO 2005/099639 A1.
Para la ablación láser en un ojo se utiliza un láser que puede ser operado de forma pulsada. Un dispositivo de apuntamiento dirige los respectivos pulsos láser a un punto determinado, respectivamente, de la córnea del ojo. El punto de incidencia sobre la córnea del ojo es determinado individualmente para cada pulso del láser. El patrón total que resulta de ello sirve para eliminar exactamente un contorno determinado sobre la córnea, para que se consigan determinados efectos de lente de la córnea. El respectivo punto de incidencia del láser sobre la córnea del ojo es fijado con relación a un lugar de referencia sobre la córnea del ojo. Puesto que el ojo se mueve durante el tratamiento láser, los ajustes del dispositivo de apuntamiento tienen que ser adaptados continuamente dependiendo de los valores de medición relativos a la posición de los ojos. Para ello se utiliza un así llamado rastreador ocular. El rastreador ocular reconoce particularmente el centro de la pupila del ojo y registra dos coordenadas de la posición de este centro. Estas dos coordenadas se utilizan para definir una desviación (offset) del dispositivo de apuntamiento. El rastreador ocular transmite los datos de entrada correspondientes al dispositivo de apuntamiento para la realización de una posición base. En la posición base, el dispositivo de apuntamiento compensa exactamente la desviación que se ha producido debido al movimiento del ojo.
En una corrección de desviación de este tipo no se considera la diferencia de que el rastreador ocular sigue el centro de la pupila del ojo, la cual se encuentra un poco más abajo dentro del ojo, mientras que el haz láser debe incidir sobre la córnea del ojo, es decir sobre la superficie. De ello resulta que en el caso de una inclinación del ojo se registrará una desviación demiasado baja.
El documento WO 2005/099639 describe un sistema láser para la corrección de defectos oculares, en el que al realizarse una ablación de córnea en un ojo, se controlan los movimientos de éste. Se distingue entre movimientos de traslación y movimientos de inclinación. Para el movimiento de traslación se emplea un rastreador ocular separado („translation tracker") . Éste detecta en qué medida unos puntos sobre la córnea experimentan un desplazamiento rectilíneo. Este resultado es comparado con las mediciones realizadas por otro rastreador ocular adicional, para de este modo deducir la inclinación del ojo. De esta forma se obtiene un vector de corrección.
El objetivo de la presente invención es desarrollar un sistema de acuerdo con el preámbulo de la reivindicación 1 en el sentido de que su modo de operación sea más preciso.
Este objetivo es alcanzado mediante un sistema con las características indicadas en la reivindicación 1.
Debido a dicho sistema, se hace realizable un procedimiento novedoso. Este procedimiento comprende por ello los siguientes pasos realizados en ciclos repetidos: a) registrar por medio de un rastreador ocular dos coordenadas de desviación de la posición del centro de la pupila del ojo a tratar, b) corregir las coordenadas de desviación, c) apuntar con el laser a un punto predefinido del ojo por medio de un dispositivo de apuntamiento, donde, al apuntar, el dispositivo de apuntamiento considera las coordenadas de desviación corregidas, y realizar al menos un disparo del láser.
Por consiguiente, ya no se utilizan directamente las coordenadas de la pupila para la corrección de desviación en el dispositivo de apuntamiento, sino que estas coordenadas de desviación son sometidas anteriormente a una corrección. La toma en consideración de las coordenadas de desviación corregidas se realiza particularmente de tal manera que el dispositivo de apuntamiento es posicionado en una posición base, la cual compensa exactamente la desviación tal como queda cuantificada por las coordenadas de desviación corregidas. Si el láser debe incidir centralmente en la córnea del ojo, entonces es exactamente esta posición base de este dispositivo de apuntamiento el ajuste correcto al apuntar. Si el punto predefinido del ojo no es central, entonces el dispositivo de apuntamiento puede ser ajustado (reajustado) correspondientemente partiendo de la posición base definida por las coordenadas de desviación corregidas, para apuntar exactamente al punto predefinido.
Por consiguiente, la formulación anterior del procedimiento parte de la idea de que el dispositivo de apuntamiento está conectado directamente con el rastreador ocular y que es posicionado directamente en la posición base mediante los datos de entrada del rastreador ocular. Por ello, mientras que en el estado de la técnica las coordenadas medidas por el rastreador ocular son transmitidas directamente al dispositivo de apuntamiento, éstas son procesadas de acuerdo con la invención.
De ninguna manera el procesamiento de los datos tiene que exigir muchos esfuerzos. Al contrario, unas simples reflexiones basadas en el teorema de Tales llevan a la conclusión de que en el paso b) del procedimiento las coordenadas de desviación eventualmente tienen que corregirse solamente por los factores constantes k1, k2.
Además, los factores k1, k2 se pueden determinar mediante mediciones. Se mide de antemano en el ojo:
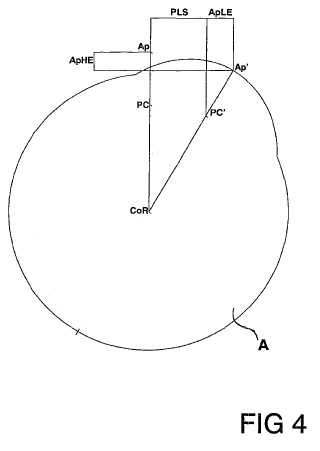
- la distancia ZP del centro de la pupila a la superficie de la córnea en el punto de mayor elevación de ésta (es decir, en el punto llamado corneal vertex, al que, por cierto, esta distancia ZP es la más pequeña,
- la distancia ZCoR del centro del cuerpo vítreo del ojo a la superficie de la córnea en el punto de mayor elevación de ésta (en aquel punto al que esta distancia ZCoR es la más grande, es decir, otra vez en el corneal vertex) . Entonces, según el teorema de Tales el factor constante k resulta ser:
Dichas pre-mediciones resultan ventajosas particularmente en aquellos casos en los que se desea una adaptación individual especialmente buena del novedoso procedimiento al ojo del paciente.
Un valor típico para ZP es 3, 75 mm, y un valor típico para ZCoR es 13 mm. También se pueden utilizar estos valores típicos y así para el factor constante se obtiene el valor: k = 1, 4. Con ello, para k se puede definir un rango de 1, 35 a 1, 45.
A una posible crítica de que en el caso de una corrección con el factor k = 1, 4 se partiría de la idea de que la desviación se debe únicamente a una inclinación del ojo y no a un movimiento de toda la cabeza con el ojo, se puede hacer frente partiendo del supuesto de que la inclinación es responsable de aproximadamente la mitad de la desviación y utilizando como factor constante 1, 17 : k : 1, 23.
Una refinación del modo de proceder descrito en lo que precede tiene en cuenta que, posiblemente, en el primer ciclo antes del primer disparo del láser el ojo no tiene una posición completamente coaxial con el sistema de observación con el rastreador ocular. Por consiguiente, una primera desviación no puede atribuirse completamente a una inclinación del ojo, pero sí las desviaciones posteriores. Esto puede expresarse mediante el siguiente cálculo: En el primer ciclo antes del primer disparo del láser, las coordenadas de desviación xFS, ET, yFS, ET, determinadas por el rastreador ocular, donde „FS" significa „First Shot", primer disparo láser, y „ET" significa „Eyetracker", rastreador ocular, son corregidas por un primer factor k1 a xFS, korr = k1 · xFS, ET, yFS, korr = k1 · yFS, ET. En otros ciclos adicionales, las coordenadas de desviación xLS, ET, yLS, ET, donde „LS" significa „Later Shot", disparo láser posterior, son corregidas de acuerdo a xLS, korr = xFS, korr + k2 (xLS, ET - xFS, ET) = k2 · xLS, ET - (k2-k1) · xFS, ET y de manera análoga para yLS, korr = k2 · yLS, ET - (k2-k1) · yFS, ET, con el factor constante k2.
Como se ha mencionado, k1 debe considerar que un porcentaje de la desviación se debe a una inclinación del ojo. Por ello, k1 se orienta por un valor de 1, 2, en particular se puede definir: 1, 0 : k 1 : 1, 2. k2, en cambio, debe considerar que la corrección ulterior parte de la idea de que la desviación adicional se debe únicamente a una inclinación, de tal manera que k2 se orienta por el valor arriba indicado de 1, 4. Se puede definir que 1, 2 : k 2 : 1, 5, siendo k2 superior a o al menos igual a... [Seguir leyendo]
Reivindicaciones:
1. Sistema (10) para la ablación de córnea en un ojo (12) con:
- un láser (14) que emite pulsos láser,
- un dispositivo de apuntamiento (16) para la orientación precisa de los pulsos láser sobre la córnea 5 del ojo,
- un rastreador ocular (20) que registra dos coordenadas de la posición del centro de la pupila del ojo
y transmite al dispositivo de apuntamiento datos de entrada para la realización de una posición base, donde el dispositivo de apuntamiento comprende un dispositivo de computación (18) que está diseñado para corregir las dos coordenadas registradas por el rastreador ocular (20) , caracterizado porque la unidad de computación está diseñada para corregir las coordenadas xFS, ET e yFS, ET, registradas antes del disparo de un primer pulso láser por el rastreador ocular (20) , por un primer factor constante k1 con 1, 0 : k1 : 1, 2 a xFS, korr = k1 · xFS, ET, yFS, korr = k1 · yFS, ET y para corregir, antes de la realización de otros disparos láser, las coordenadas xLS, ET, yLS, ET registradas entonces por el rastreador ocular (20) , conforme a con el factor constante k2 , siendo 1, 2 : k 2 : 1, 5 Y k2ºk1, de tal manera que el dispositivo de apuntamiento (16) compensa exactamente, en la posición base, una desviación que ha sido originada por un movimiento del ojo y que queda cuantificada por las coordenadas corregidas.
2. Sistema (10) según la reivindicación 1, caracterizado porque el dispositivo de apuntamiento comprende al menos un espejo movible mediante motores, donde los motores pueden ser accionados respectivamente mediante el suministro de una señal que reproduce una coordenada y reciben señales del dispositivo de computación (18) , las cuales reproducen las coordenadas corregidas.
Patentes similares o relacionadas:
Sistema de irradiación para aplicaciones oftalmológicas, del 18 de Marzo de 2020, de Avedro, Inc: Sistema de irradiación oftalmológica, que comprende: a. al menos una fuente de radiación , que emite una radiación electromagnética para irradiar el […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Dispositivo y procedimiento para generar datos de control para la corrección operativa de la ametropía de un ojo, del 7 de Marzo de 2018, de CARL ZEISS MEDITEC AG: Procedimiento para generar datos de control, que están configurados para controlar un dispositivo de procesamiento por láser para la corrección operativa de la ametropía […]
Procedimiento y aparato para controlar la posición de imagen periférica para reducir la progresión de miopía, del 27 de Diciembre de 2017, de BRIEN HOLDEN VISION INSTITUTE: Un procedimiento para producir un dispositivo óptico descentrable, el procedimiento que comprende proporcionar un dispositivo óptico descentrable que tiene: […]
Sistema para configurar superficies de corte curvadas en un material transparente, del 25 de Octubre de 2017, de CARL ZEISS MEDITEC AG: Sistema para configurar una superficie de corte elipsoidal en la córnea del ojo , con una fuente de radiación láser (S), que enfoca la radiación láser […]
Dispositivo para el tratamiento de corte de la córnea humana, del 28 de Junio de 2017, de WAVELIGHT GMBH: Dispositivo para el tratamiento de corte de la córnea humana con radiación con láser pulsada enfocada, con componentes controlables para […]
Tratamiento posterior en la corrección refractiva mediante cirugía oftálmica, del 31 de Mayo de 2017, de CARL ZEISS MEDITEC AG: Aparato de planificación para generar datos de control para un dispositivo de tratamiento para la cirugía oftálmica destinada a la corrección refractiva, […]
Sistema óptico de etapas variables para láser quirúrgico oftálmico, del 22 de Febrero de 2017, de Alcon LenSx, Inc. (100.0%): Un sistema de láser oftálmico, que comprende: una fuente láser que genera un haz láser de impulsos de láser; un escáner XY que escanea el haz láser en […]