Sistema de ayuda a la conducción de vehículos para asistencia en el cambio de carril.
Sistema de asistencia en el cambio de carril de vehículos para un vehículo,
que comprende:un módulo de detección de carril (LDM), que comprende un sistema capaz de procesar las imágenes de lacarretera;
un módulo de detección lateral (LVD), que comprende un sistema de radar capaz de detectar objetos en loscarriles laterales y medir sus posiciones y velocidades;
un módulo de datos del vehículo (SVV), capaz de detectar los datos en los parámetros de la circulación;un módulo de control de la reacción táctil (HFC), capaz de recibir señales desde dichos módulos de detecciónde carril lateral (LDM) y lateral (LVD), y desde el módulo de datos del vehículo (SVV) y proporcionar un parantagonista a ser transmitido al sistema de dirección del vehículo;
caracterizado por que dicho módulo de detección carril (LDM) es capaz de detectar la geometría de la carretera yla trayectoria del vehículo con respecto a dichos carriles laterales y por que dicho sistema de radar (LVD) realizadicha detección de objetos en una parte específica de la imagen que corresponde a los carriles adyacentes izquierdoy/o derecho y se adapta dinámicamente mediante dicho módulo de detección de carril (LDM) a los cambios en lageometría de la carretera.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2009/051925.
Solicitante: IVECO S.P.A..
Inventor/es: Vada,Maurizio, AIMO BOOT,Marco.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W50/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 50/00 Detalles de los sistemas de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular. › Interacción entre el conductor y el sistema de control.
- B62D15/02 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 15/00 Direcciones no previstas en otro lugar. › Indicadores de dirección.
PDF original: ES-2387946_T3.pdf
Fragmento de la descripción:
Sistema de ayuda a la conducción de vehículos para asistencia en el cambio de carril
Campo de la invención
La presente invención se refiere a un sistema de ayuda a la conducción de vehículos y, más en particular, a un sistema de ayuda a la conducción de vehículos para asistencia en el cambio de carril.
Descripción de la técnica anterior
Los sistemas de ayuda a la conducción de vehículos para asistencia en el cambio de carril son ya conocidos en la técnica.
Por ejemplo, las Patentes EP-1312506 o WO2007/014633, consideradas como la técnica anterior más próxima, describen un sistema de ayuda a la conducción adecuado para la asistencia al conductor en la maniobra de cambio de carril, mediante la señalización de peligros potenciales, es decir vehículos que se aproximen en los carriles adyacentes que puedan colisionar con el vehículo asistido durante la maniobra de cambio de carril.
Los sistemas del tipo conocido, para obtener un sistema de supervisión del carril lateral, usan una cámara de video externa, preferiblemente integrada en el espejo retrovisor lateral, que proporciona una señal de salida adecuada para la detección de la presencia y el movimiento de otro vehículo en el carril adyacente.
El sistema, sin embargo, no es el sistema óptimo debido a que el alcance de la detección no supera la longitud del vehículo, por lo tanto no puede detectar correctamente los vehículos que se aproximen a alta velocidad desde una larga distancia, que puedan interferir negativamente en el tiempo de reacción del conductor normal ante obstáculos.
Por lo tanto dichas soluciones conocidas proporcionan unos niveles limitados de asistencia a la conducción, que no son suficientes para garantizar una asistencia global para todas las situaciones de conducción peligrosas.
Sumario de la invención
Por lo tanto la intención de la presente invención es proporcionar un sistema de asistencia para el cambio de carril que resuelva todos los problemas expuestos anteriormente.
La presente invención se refiere a un sistema de asistencia en el cambio de carril de vehículos que comprende:
un módulo de detección de carril (LDM, del inglés “Lane Detection Module”) , que comprende un sistema capaz de procesar las imágenes de la carretera; un módulo de detección lateral (LVD, del inglés “Lateral Detection Module”) , que comprende un sistema de radar capaz de detectar objetos en los carriles laterales y medir sus posiciones y velocidades; un módulo de datos del vehículo (SVV) , capaz de detectar los datos en los parámetros de la circulación; un módulo de control de la reacción táctil (HFC) , capaz de recibir señales desde dichos módulos de detección de carril lateral (LDM) y lateral (LVD) , y desde el módulo de datos del vehículo (SVV) y proporcionar un par antagonista a ser transmitido al sistema de dirección del vehículo;
caracterizado por que dicho módulo de detección de carril (LDM) es capaz de detectar la geometría de la carretera y la trayectoria del vehículo con respecto a dichos carriles laterales y porque dicho sistema de radar (LVD) realiza dicha detección de objetos en una parte específica de la imagen que corresponde a los carriles adyacentes izquierdo y/o derecho y se adapta dinámicamente mediante dicho módulo de detección de carril (LDM) a los cambios en la geometría de la carretera.
Preferiblemente, el módulo de asistencia en el cambio de carril (LCAM, del inglés “Lane Changing Assistance Module”) permite prevenir la condición de emergencia generada por la aproximación de otro vehículo a lo largo del mismo carril sobre el que el vehículo que cambia de carril está viajando, por medio de una intervención apropiada en la dirección, esto es mediante la aplicación de un par de dirección activo que impida que el conductor realice una maniobra de cambio de carril en condiciones peligrosas.
La presente Invención se refiere en particular a un sistema de ayuda a la conducción de vehículos para la asistencia en el cambio de carril, como se describe más completamente en las reivindicaciones, que son una parte integral de esta descripción.
Breve descripción de las figuras
Las finalidades y ventajas de la presente invención se harán más claras a partir de la descripción detallada a continuación de una realización preferida (y las formas alternativas relativas de realización) y los dibujos que están adjuntos a la misma, que son meramente ilustrativos y no limitativos, en los que:
- las figuras desde la 1.1 a la 1.6 muestran los diagramas de situaciones típicas de circulación en carretera en las que se aplica el sistema de asistencia en el cambio de carril de acuerdo con la presente invención;
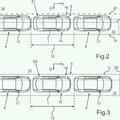
- las figuras 2.1 y 2.2 muestran respectivamente los diagramas del radio de curvatura de la carretera y de la trayectoria del vehículo con respecto al carril de tráfico;
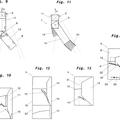
- las figuras desde la 3.1 a la 3.4 muestran dos variantes de colocación de los radares sobre el vehículo;
- la figura 4 muestra un diagrama de bloques funcional del sistema de ayuda a la conducción de acuerdo con la presente invención;
- la figura 5 muestra un diagrama del par antagonista aplicado a la dirección por el sistema;
- la figura 6 muestra un diagrama de estado finito del funcionamiento del software del sistema.
En las figuras se usan los mismos números y letras de referencia para identificar los mismos componentes
o componentes, elementos o magnitudes de funcionalidad equivalente.
Descripción detallada de la invención
El sistema que es objeto de la invención se describe ahora en detalle con referencia a sus módulos constituyentes principales.
El sistema de asistencia en el cambio de carril, en lo que sigue denominado LCA, comprende dos funciones principales:
- comprobación de la presencia de vehículos en zonas adyacentes, es decir en paralelo sobre el carril lateral (supervisión del punto ciego) ;
- comprobación de los vehículos que se aproximan desde atrás, con evaluación de la distancia y de la velocidad relativa de aproximación (supervisión cerrada del vehículo) .
El sistema LCA informa al conductor de la presencia de vehículos de acuerdo con las dos funciones descritas anteriormente, tanto en el caso en que el vehículo mantenga su carril como en el caso en que el conductor intente una maniobra de cambio de carril.
Por lo tanto, el sistema LCA tiene dos finalidades: en primer lugar informa al conductor de la presencia de vehículos en el punto ciego (cuando el indicador de dirección se activa) ; en segundo lugar advierte al conductor en caso de que intente maniobras de cambio de carril peligrosas. Por esta razón es necesario detectar la presencia de otros vehículos tanto en los puntos ciegos como en los carriles adyacentes al carril sobre el que está viajando el vehículo. Para la función de advertencia es necesario también conocer la distancia y la velocidad de los vehículos que siguen, para evaluar su criticidad.
Es importante recordar que un elevado porcentaje de los accidentes tiene lugar de la siguiente forma: dos vehículos siguen trayectorias paralelas, uno de los dos cambia de carril y colisiona con el otro vehículo.
En relación a su funcionamiento, el sistema LCA tiene preferiblemente las siguientes características:
- funciona sobre cualquier tipo de carretera, típicamente sobre más carriles paralelos, con un radio de curvatura mínimo que pueda ser por ejemplo 125, 250 ó 500 m (fig. 2.1) dependiendo de los casos;
- interviene dentro de un cierto intervalo de velocidad del vehículo, por ejemplo desde una velocidad mínima de aproximadamente 5 km/h, hasta una velocidad máxima que corresponde al límite permitido por la ley (90 km/h para camiones pesados) ;
- tiene que funcionar en cualquier condición meteorológica, incluso las más difíciles, por ejemplo niebla, lluvia fuerte o nieve y en cualquier condición de iluminación, incluso por la noche;
- tiene que detectar cualquier tipo de vehículo.
... [Seguir leyendo]
Reivindicaciones:
1. Sistema de asistencia en el cambio de carril de vehículos para un vehículo, que comprende:
un módulo de detección de carril (LDM) , que comprende un sistema capaz de procesar las imágenes de la carretera; un módulo de detección lateral (LVD) , que comprende un sistema de radar capaz de detectar objetos en los carriles laterales y medir sus posiciones y velocidades; un módulo de datos del vehículo (SVV) , capaz de detectar los datos en los parámetros de la circulación; un módulo de control de la reacción táctil (HFC) , capaz de recibir señales desde dichos módulos de detección de carril lateral (LDM) y lateral (LVD) , y desde el módulo de datos del vehículo (SVV) y proporcionar un par antagonista a ser transmitido al sistema de dirección del vehículo;
caracterizado por que dicho módulo de detección carril (LDM) es capaz de detectar la geometría de la carretera y la trayectoria del vehículo con respecto a dichos carriles laterales y por que dicho sistema de radar (LVD) realiza dicha detección de objetos en una parte específica de la imagen que corresponde a los carriles adyacentes izquierdo y/o derecho y se adapta dinámicamente mediante dicho módulo de detección de carril (LDM) a los cambios en la geometría de la carretera.
2. Sistema de asistencia en el cambio de carril para un vehículo de acuerdo con la reivindicación 1, en el que dicho sistema de radar comprende uno o más radares para obtener una visión lateral que detecta los vehículos en los carriles adyacentes y dichos medios para realizar esa detección de objetos en los carriles adyacentes de acuerdo con el análisis de los movimientos de los objetos detectados, teniendo el elemento en el entorno un movimiento relativo con una dirección opuesta a la de los vehículos que están adelantando.
3. Sistema de asistencia en el cambio de carril para un vehículo de acuerdo con la reivindicación 2, en el que dichos uno o más radares se colocan proyectándose desde la pared lateral del vehículo, preferiblemente uno en cada lado, para controlar ambos carriles adyacentes, el derecho y el izquierdo, desde una altura apropiada desde el suelo, en el lado de la cabina, preferiblemente encima de la rueda delantera o en el contrapié del escalón de la escalera lateral usada para acceder a la cabina, orientados hacia la parte posterior del vehículo.
4. Sistema de asistencia en el cambio de carril para un vehículo de acuerdo con la reivindicación 3, en el que dichos uno o más radares comprenden un soporte del tipo plegable, de modo que cuando la velocidad es más baja que el umbral de intervención de control o cuando el vehículo está parado, el radar se puede plegar manual o automáticamente, preferiblemente en un compartimento apropiado en las paredes laterales.
5. Sistema de asistencia en el cambio de carril para un vehículo de acuerdo con la reivindicación 4, en el que dicho soporte del tipo plegable es del mismo tipo que el adoptado para los espejos retrovisores del vehículo, y que comprende una posición de tope cuando esté abierto, preferiblemente del tipo de pestillo.
6. Sistema de asistencia en el cambio de carril para un vehículo de acuerdo con la reivindicación 1, en el que dicho módulo de reacción táctil (HFC) proporciona dicho par antagonista a ser transmitido al sistema de dirección del vehículo de acuerdo con un diagrama de par que identifica tres zonas de tráfico en el carril:
- zona de no intervención, en la que el par antagonista es cero mientras que el vehículo permanezca en la mitad del carril;
- zona intermedia, en la que el par antagonista es una función lineal de un valor máximo del par antagonista solicitado y del ancho del carril;
- zona de intervención máxima, en la que el par proporcionado es el máximo, cuando el vehículo circula en esta zona “lateral” del carril y está presente un vehículo peligroso en los carriles adyacentes.
7. Sistema de asistencia en el cambio de carril para un vehículo de acuerdo con la reivindicación 6, en el que dicho módulo de reacción táctil (HFC) es adecuado para la realización de una condición de “anulación”, que es una condición que supera o cancela la intervención del sistema en condiciones en las que:
- un par de dirección aplicado por el conductor supera el par antagonista máximo;
- un valor absoluto del ángulo de dirección supera un cierto umbral;
- el ancho del carril es inferior a un valor mínimo o superior a un valor máximo;
- el vehículo está fuera del carril.
8. Sistema de asistencia en el cambio de carril para un vehículo de acuerdo con la reivindicación 1, que comprende además:
un módulo de control de dirección (SCM) , capaz de transferir al volante dicho par antagonista; un módulo de interfaz hombre-máquina (HMI) .
Patentes similares o relacionadas:
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Sistemas y método de ayuda a la conducción de vehículos, del 19 de Febrero de 2020, de Siemens Mobility S.A.S: Sistema de ayuda a la conduccion de un vehiculo , dicho sistema comprende: un dispositivo de determinacion de trayectoria capaz de determinar una trayectoria para […]
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Dispositivo de asistencia para maniobras de atraque en una dársena, del 16 de Octubre de 2019, de NEWTL (Société par Actions Simplifiée): Vehículo de carretera que incluye ruedas delanteras montadas en un eje de dirección delantero y ruedas traseras montadas en un eje trasero […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Sistema de asistencia al conductor, del 11 de Junio de 2019, de ROBERT BOSCH GMBH: Sistema de asistencia al conductor para vehículos a motor, que comprende: - un regulador de guiado longitudinal , el cual está configurado […]
 Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]
Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]