Sistema automático para conservar muestras a una temperatura controlada.
Un sistema automático (100) para la conservación de muestras (19) que comprende:
una camera tennoaislada (1) de almacenamiento a temperatura controlada que contiene una pile de discos (9) totalmente centrada en un eje vertical (8) sobre la que hay situados emplazamientos (17) de muestras (19), estando dotados los discos de una ranura radial (14) y de dichos emplazamientos (17) para el almacenamiento de muestras (19); y un sistema robótico (4), contenido en una segunda camera (2) encima y separada de la camera (1) de almacenamiento por medio de una balda aislante (6) dotada con una abertura (7) de acceso controlado, estando dotado el sistema robótico (4) de un dispositivo (18) de recogida que mueve las muestras (19), caracterizado porque el sistenna robotico es un sistema robotico cartesiano (4) que mueve el dispositivo (18) de recogida en una dirección horizontal y por encima de la abertura (7) de acceso controlado y en una dirección vertical, para que dicho dispositivo (18) de recogida movido por el sistema cartesiano (4) pueda alcanzar cualquier emplazamiento (17) de uno de los discos de la pile (9) atravesando, secuencialmente, la abertura (7) de acceso controlado de la beide aislante (6), las ranuras radiales (14) de la pile de discos (9) que se encuentran por encima del emplazamiento (17) implicado y girado en una posición "0" en la que dichas ranuras radiales ester, en la misma vertical que la abertura (7) de acceso controlado.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2003/010716.
Solicitante: ALS S.r.l.
Inventor/es: ZENOBI,MAURO, ANGELANTONI,GIANLUIGI, DE BLASIO,PASQUALE, PEDRAZZINI,ANDREA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B01L1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B01 PROCEDIMIENTOS O APARATOS FISICOS O QUIMICOS EN GENERAL. › B01L APARATOS DE LABORATORIO PARA LA QUIMICA O LA FISICA, DE USO GENERAL (aparatos de uso médico o farmacéutico A61; aparatos para aplicaciones industriales o aparatos de laboratorio cuya estructura y funciones son comparables a las de aparatos industriales similares, ver las clases relativas a los aparatos industriales, en particular las subclases B01 y C12; aparatos de separación o de destilación B01D; dispositivos de mezcla o de agitación B01F; atomizadores B05B; tamices, cribas B07B; tapones, capuchones B65D; manipulación de líquidos en general B67; bombas de vacío F04; sifones F04F 10/00; grifos, válvulas F16K; tubos, empalmes para tubos F16L; aparatos especialmente adaptados al estudio y análisis de materiales G01, particularmente G01N; aparatos eléctricos u ópticos, ver las subclases apropiadas en las secciones G y H). › Recintos; Cámaras (campanas de humo B08B; provistas de dispositivos de manipulación, cajas para guantes B25J; cámaras frías F25D).
- F25D25/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F25 REFRIGERACION O ENFRIAMIENTO; SISTEMAS COMBINADOS DE CALEFACCION Y DE REFRIGERACION; SISTEMAS DE BOMBA DE CALOR; FABRICACION O ALMACENAMIENTO DEL HIELO; LICUEFACCION O SOLIDIFICACION DE GASES. › F25D REFRIGERADORES; CAMARAS FRIGORIFICAS; NEVERAS; APARATOS DE ENFRIAMIENTO O CONGELACION NO PREVISTOS EN OTRO LUGAR (escaparates refrigerados A47F 3/04; recipientes con aislamiento térmico para uso doméstico A47J 41/00; vehículos frigoríficos, véanse las subclases apropiadas correspondientes a las clases B60 - B64; recipientes con aislamiento térmico en general B65D 81/38; sustancias para la transferencia, intercambio o almacenamiento de calor, p. ej. refrigerantes, o sustancias para la producción de calor o frío por reacciones químicas distintas a la combustión C09K 5/00; recipientes con aislamiento térmico para gases licuados o solidificados F17C; acondicionamiento o humidificación del aire F24F; máquinas, instalaciones o sistemas frigoríficos F25B; enfriamiento sin refrigeración de los instrumentos o aparatos similares G12B; enfriamiento de motores o bombas, véanse las clases apropiadas). › Carga, soporte o descarga de los productos a enfriar.
- G01N35/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › Análisis automático no limitado a procedimientos o a materiales tratados en uno sólo de los grupos G01N 1/00 - G01N 33/00; Manipulación de materiales a este efecto.
- G01N35/04 G01N […] › G01N 35/00 Análisis automático no limitado a procedimientos o a materiales tratados en uno sólo de los grupos G01N 1/00 - G01N 33/00; Manipulación de materiales a este efecto. › Detalles del transportador.
PDF original: ES-2530181_T3.pdf
Fragmento de la descripción:
Sistema automático para conservar muestras a una temperatura controlada.
La presente invención pertenece al sector de los dispositivos de conservación y, en particular, se refiere a un sistema automático para conservar muestras en general y, en particular, muestras biológicas a temperatura 5 controlada.
Se conocen dispositivos termostáticos para la conservación de muestras de material biológico a baja temperatura que consisten en congeladores del tipo denominado horizontal con la abertura por arriba y del tipo vertical con la abertura por delante.
En dichos dispositivos conocidos, las muestras se conservan en recipientes, generalmente de pequeñas dimensiones, situados manualmente en cestos o soportes movidos manualmente.
Las soluciones que están actualmente disponibles son controladas únicamente de forma manual y tienen las siguientes limitaciones graves:
• errores humanos en la manipulación,
• errores humanos en la identificación de las muestras,
• exposición de los operarios a los riesgos de la contaminación biológica y a quemaduras en caso de contacto accidental con partes de baja temperatura,
• lentitud intolerable de los procedimientos manuales y consiguientes costes de gestión elevados.
En la solicitud de patente estadounidense nO 5.233.844 se dan a conocer dispositivos de conservación según el preámbulo de la reivindicación 1; estos dispositivos tienen una estructura muy compleja y el movimiento de las muestras es muy complicado.
El objeto de la presente invención es proponer un sistema para la conservación de muestras a temperatura 25 controlada, en particular del tipo biológiCO, que sea capaz de mover automáticamente dichas muestras, a la entrada y la salida, eliminando las limitaciones recién mencionadas.
El objeto de la presente invención se alcanza según el contenido de las reivindicaciones.
Se destacan las caracteristicas de la invención con particular referencia a las láminas de dibujos adjuntas, en las que:
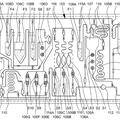
la Figura 1 ilustra una vista esquemática lateral del dispositivo de la presente invención en la que varias partes han sido parcial o totalmente eliminadas para destacar otras mejor;
la Figura 2 ilustra una sección del sistema ilustrado en la Figura 1 realizada en un plano horizontal;
35· la Figura 3 ilustra la misma sección que la Figura 2 con el disco rotado cierto ángulo.
El sistema 100 está constituido principalmente por un conjunto de dos cámaras 1 y 2 separadas horizontalmente por una balda 6 aislada térmicamente y conectadas funcionalmente entre si, que tienen el objetivo, en el caso de la primera 1, situada debajo, de contener las muestras a temperatura controlada, y en el caso de la segunda 2, situada encima de la primera, de contener a temperatura ambiente, medios para mover las muestras entre las cámaras y desde la cámara superior hacia el exterior y viceversa.
La cámara inferior está dotada de medios 3 que controlan su temperatura y que están situados en un lateral de la misma cámara.
De la misma manera, la cámara superior 2 está equipada de medios 5 para controlar los sistemas de movimiento robotizado de las muestras, que están situados en un latéral de la misma cámara.
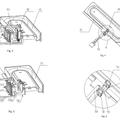
La cámara 1 contiene una pila de discos 9 totalmente centrada en un eje 8 sobre la que están situados los emplazamientos 17 de las muestras 19.
Los discos están soportados individualmente por· un grupo de tres soportes periféricos 22 situados en tres coiTespondientes montantes verticales 23 conectados entre si mecánicamente cada -1200 , para que el peso de cada disco sea aguantado en sus propios soportes 22 idénticamente para todos los discos.
c
·--Cada· disco-se earacteriza--porque--tiene--una ranura-radial-14-asociadacon una·· marca-·de·cero~de modO'=queel·_cc .. . _.alineamiento sobre la propia marca garantice el consiguiente alineamiento de las ranuras de los discos en la misma vertical. Los discos 9 en la posición ·0' tienen ranuras radiales 14 en la misma vertical que la abertura 7 de acceso controlado practicada en la balda 6 de separación entre la cámara 1 y la cámara 2. Dicho alineamiento vertical permite que el sistema cartesiano 4 penetre verticalmente en toda la pila de discos con su dispositivo 18 de recogida.
. Para lo anterior, el dispositivo 18 de recogida puede alcanzar cualquier emplazamiento que se encuel'ltreen un disco girado previamente atraveSando, secuencialmente, la abertura' 7 situada en la balda aislante 6 y todas las ranuras radiales 14de los discos por encima del. disco que contiene el emplazamiento implicado. Por lo tanto, la muestra 19 puede ser recogida o depositada en dicho emplazamiento. .
El dispositivo 12 de ·0' del que está dotado cada disco individual inmoviliza en la posición ·0' todos los discos, salvo el que contiene el emplazamiento implicado en la operación de carga o descarga de la muestra 19; dicho disco gira en tomo al eje 8 hasta que sitúa el emplazamiento 17 implicado en la vertical de la abertura 7 de acceso controlado.
El sensor 13 de posición del que está equipado cada dispositivo 12 de ·0· individual garantiza que se monitorice la posición de los dispositivos que detienen los discos 9 para que solo el disco que contiene el emplazamiento implicado en la carga o la descarga sea girado partiendo de la PQsrción ·0·.
A la vez que se libera un disco de. la pila 9 que contiene el emplazamiento en el que ha de realizarse la carga o la descarga, se activa el correspondiente dispositivo 21, iniciando el giro del disco hasta que presenta el emplazamiento implicado en la vertical del dispositivo 18 de recogida del sistema robótico cartesiano 4.
Como ejemplo, el' dispositivo 21 para la rotación de cada disCo puede estar realizado por una rueda dentada accionada mediante instrucciones, por medio del dispositivo 24 en un eje motorizado 25. La posición angular de dicho árbol motorizado 25 es monitorizada por un codificador de la resolución adecuada. Dicha .rueda dentada 21 está permanentemente acoplada con una posición de dentado en la periferia de su correspondiente disco de la pila 9.
La cámara superior 2, separada de la cámara 1 por la balda 6 de aislamiento, también contiene, además del ya mencionado sistema robótico 4, el sistema de identificación de la muestra 11, el sensor Óptico 10 y el cajón de E/S para la entrada/salida de las muestras 19.
El principal objetivo de la separación producida por la balda 6 de aislamiento es mantener todos los dispositivos contenidos en la cámara 2 a·temperatura ambiente para que puedan ser sometidos a mantenimiento sin interferir en la cámara 1 de temperatura controlada~
Como ejemplo, el sistema robótico 4, con al menos dos ejes de control numérico, está compuesto de un ~tln para el movimiento horizontal, el cual, asu vez, lleva un eje vertical que está dotado del dispositivo 18 de recogida y una parte extrema de un sensor óptico 10 para obtener una senal de retomo de la procesión de la colocación de la pinza' 18 en relación con el emplazamiento 17.
Como ejemplo, dicho sensor óptico 10 puede fabricarse con un dispositivo de fibra óptica o con una microcámara.
El control electrónico combinado del movimiento de los drscos y del sistema robótico permite que los emplazamientos de las muestras sean gestionados automáticamente.
Una caracterlstica. fundamental de este sistema automático 100' de gestión para la conservación de muestras a temperatura controlada es establecer una conexión inequlvoca entre el emplazamiento 17 de almacenamiento y la muestra 19 usando un procedimiento para identificar la muestra con medios 11 puestos dentro de la cámara 2 para que sea posible, a la entrada o la salida, confirmar la identidad de la muestra que se mueve.
Como ejemplo, el sistema 11 de identificación puede ser un lector de códigos de barras, un lector de etiquetas o, preferentemente, un dispositivo de identificación de un código bidimensional marcado directamente en la superficie de la muestra.
La entrada y la salida de las muestras tiene lugar usando un cajón 20 de E/S que pone en comunicación, cuando asl se ordena, el mundo exterior con la cámara superior 2. La caracterfstica del cajón 20 es que forma una junta estanca entre la cámara 2 yel mundo externo pa~ que, tanto en la posición abierta como en la posición cerrada, la entrada de aire externo húmedo en la cámara 2 se limite en un grado máximo.
La operación de carga se produce ordenando la apertura del cajón, que puede ser cargado de esta manera con una o más muestras. Con el cierre del cajón, las muestras son transferidas dentro de la cámara... [Seguir leyendo]
Reivindicaciones:
1. Un sistema automático (100) para la conservación de muestras (19) que comprende: una cámara termoaislada (1) de almacenamiento a temperatura controlada que comiene una pila de discos (9) totalmente centrada en un eje vertical (8) sobre la que hay situados emplazamientos (17) de muestras (19) , estando dotados los discos de una 5' ranura radial (14) y de dichos emplazamiéntos (17) para el almacenamiento de muestras (19) ; y un sistema robótico (4) , contenido en una segunda cámara (2) encima y separada de la cámara (1) de almacenamiento por medio de una balda aislante (6) dotada con una abertura (7) de acceso controlado, estando dotado el sistema robótico (4) de un dispositivo (18) de recogida que mueve las muestras (19) , caracterizado porque el sistema robótico es un sistema robótico cartesiano (4) que mueve el dispositivo (18) de recogida en una dirección horizontal y por encima de la abertura (7) de acceso controlado y en una dirección vertieal, para que dicho dispositivo (18) de recogida movido por el sistema cartesiano (4) pueda alcanzar cualquier emplazamiento (17) de uno de los discos de la pila (9) atravesando, secuencialmente, la abertura (7) de acceso controlado de la balda aislante (6) , las ranuras radiales (14) de la pila de discos (9) que se encuentran por en.cima del emplazamiento (17) implicado y girado en una posición .0" en la que dichas ranuras radiales están en la misma vertical que la abertura (7) de acceso controlado.
3. Un sistema según la reivindicación 1 en el que la balda aislante (6) es una balda horizontal aisladalérmicamente, la cámara (1) de almacenamiento está situada debajo para contener las muestras a temperatura controlada y la segunda cámara (2) está situada encima de la primera para contener, a temperatura ambiente, el sistema robótico cartesiano (4) para mover las muestras entre las dos cámaras y desde la segunda cámara hacia el exterior y viceversa.
(23) situados a 1200 en la periferia de cada disco individual.
5. Un sistema según las reivindicaciones 1 y 4 en el que se puede hacer girar a cada disco individual (9) , y solo a un disco cada vez, por medio de un dispositivo (21) que se acopla en la periferia correspondiente de cada disco (9) .
6. Un sistema según la reivindicación5 en el que el dispositivo (21) comprende un complejo de ruedas dentadas
(21) siempre en contacto en el dentado periférico de los correspondientes discos (9) y de un dispositivo (24) de acoplamiento integral Con un árbol motorizado (25) , que es debidamente controlado, . que pone en rotación únicamente una rueda dentada (21) y, asl, al correspondiente disco de la pila (9) . .
7. Un sistema según las reivindicaciones 1 y 6 en el que todos los discos (9) son mantenidos bloqueados por un dispositivo (12) de bloqueo en ·0· en dicha posición ·0' con las ranuras (14) alineadas verticalmente, salvo el disco 35 cuya rotación pone el emplazamiento (17) bajo dichas ranuras.
8. Un sistema según las reivindicaciones 1, 6 Y 7 en el que el dispositivo (12) de bloqueo de los discos en .0" está dotado de un sensor (13) capaz de monitorizar la posición de dicho dispositivo de bloqueo en .0" y, a la vez, la posición del .0" de cada disco mantenido bloqueado.
9. Un sistema según las reivindicaciones anteriores en el que el disco de la pila (9) que es puesto en rotación por el dispositivo (21) es monitorizado en su posición angular por medio de un codificador montado en el árbol motorizado
(25) de tracción.
10. Un sistema según la reivindicación 1 en el que la segunda cámara (2) contiene un dispositivo para identificar las muestras (11) a la entrada y la salida del sistema (100) .
11. Un sistema (100) según la reivindicadón 1 en el que las operaciones de inserción de las muestras en el sistema
y de extracción del mismo se producen por medio de un cajón (20) de E/S que conecta el mundo exterior con la segunda cámara (2) , que contiene, entre otras cosas, el sistema robótico cartesiano (4) .
12. Un sistema (100) según la reivindicación 1 en el que el acceso a las muestras puede producirse únicamente por medio del sistema robótico cartesiano (4) ; es decir, no puede producirse con una intervención de tipo manual.
13. Un sistema (100) según la reivindicación 1 en el que la abertura (7) de acceso controlado en la balda , aislante (6) 'está dotada de cuerpós que mantienen dicha abertura , cerrada para que 'los 'cuerpos especlficos abran dicha abertura únicamente cuando paSa el dispositivo de recoQida de muestras.' ,
14. Un sistema (100) según la reivindicación 1 en el que el dispositivo (18) de recogida de la muestra (19) está --_c:C--eqüipaClocooric urfsenS'ófoplfCO'º rrO) "pariliñOiiitónz'afTErCOfí'eai'OO1óCáci6ñ"Cle 'ClICIloalspoSñnio-Cle"reoogKl8-erf~-~-, .._.
relación con el emplazamiento de la muestra.
15. Un sistema (100) según las reivindicaciones anteriores en el que cada mecanismo para accionar y acceder a la cámara (1) de almacenamiento está contenido en la segunda cámara (2) , permitiendo que se lleve a cabo la actividad de mantenimiento en dichos dispositivos sin interferir en la cámara (1) de almacenamiento.
16. Un sistema (100) según las reivindicaciones anteriores en el que toda la gestión de los dispositivos del sistema es controlada por un sistema de control numérico accionado por un soporté lógico dedicado de gestión.
17. Un sistema (100) según las reivindicaciones anteriores en el que el sistema robotizado está controlado por un sOporte lógico que registra cada operación emprendida por un operario y llevada a cabo por el sistema (100) .
Patentes similares o relacionadas:
 Dispositivo de análisis y método para examinar una muestra, del 29 de Julio de 2020, de BOEHRINGER INGELHEIM VETMEDICA GMBH: Dispositivo de análisis para probar una muestra (P) biológica particular por medio de un cartucho que puede ser recibido,
comprendiendo el dispositivo […]
Dispositivo de análisis y método para examinar una muestra, del 29 de Julio de 2020, de BOEHRINGER INGELHEIM VETMEDICA GMBH: Dispositivo de análisis para probar una muestra (P) biológica particular por medio de un cartucho que puede ser recibido,
comprendiendo el dispositivo […]
Analizador y método de análisis que usan un recipiente de puntas con cubierta, del 1 de Julio de 2020, de SYSMEX CORPORATION: Analizador que comprende: unos medios para montar un recipiente de líquido; una pluralidad de medios para montar, cada uno, uno de una pluralidad […]
Analizador de prueba que comprende un punzón de aluminio desechable para elementos de prueba de inmunohematología, del 17 de Junio de 2020, de ORTHO-CLINICAL DIAGNOSTICS, INC.: Un método para reducir la contaminación cruzada en un aparato de prueba de inmunodiagnóstico, el método que comprende las etapas de: estimar […]
Recipiente de reactivo para almacenar un reactivo líquido, aparato para fabricar una parte inferior de un recipiente de reactivo y un método para fabricar una parte inferior de un recipiente de reactivo, del 3 de Junio de 2020, de F. HOFFMANN-LA ROCHE AG: Un recipiente de reactivo para un instrumento analítico, en donde el recipiente de reactivo está configurado para almacenar un reactivo líquido, […]
Procedimiento y sistema de medición para el monitoreo del desgaste de contactos deslizantes, del 27 de Mayo de 2020, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Sistema de medición para la medición de una muestra en un dispositivo de análisis automático ; en donde el sistema de medición comprende […]
Portarrecipientes universal, del 6 de Mayo de 2020, de BECTON, DICKINSON AND COMPANY: Portarrecipientes universal que comprende: una placa de base ; un par de estructuras de soporte (104a, 104b) acopladas a la placa de base por medio […]
 Dispositivo totalmente automático para la detección y análisis de sangre fecal oculta, del 29 de Abril de 2020, de W.H.P.M. Bioresearch and Technology Co., Ltd: Un analizador totalmente automático para la detección de sangre fecal oculta utilizado para detectar una caja de muestra , que comprende un manguito transparente […]
Dispositivo totalmente automático para la detección y análisis de sangre fecal oculta, del 29 de Abril de 2020, de W.H.P.M. Bioresearch and Technology Co., Ltd: Un analizador totalmente automático para la detección de sangre fecal oculta utilizado para detectar una caja de muestra , que comprende un manguito transparente […]
Dispensador de tubos de dos pisos, del 1 de Abril de 2020, de TECHNO MEDICA CO., LTD: Dispensador de tubos de dos pisos (A, B), que comprende: a) Una pluralidad de dispositivos de almacenamiento de tubos de muestras sanguíneas independientes […]