Sistema anti-salto.
Sistema anti-salto del tipo de los que comprenden una valla (1) caracterizado porque dicha valla (1) fijada a la superficie del terreno gracias a al menos dos postes de sujeción (2) que sirven a su vez como soporte de tres rodillos (3a,
3b, 3c) que se mueven sobre su propio eje, y un cuarto rodillo motorizado (3d), situado en el extremo superior de la valla (1), presentando un movimiento uniforme mientras que se encuentra activo; donde el rodillo motorizado (3d) se encuentra asociado a unos medios electrónicos (4), encargados de activar dicho rodillo motorizado (3d) y unos medios sonoros (5), una vez que al menos un detector de proximidad (6) detecta la presencia de un extraño.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430564.
Solicitante: PALOMARES CABRERO, José.
Nacionalidad solicitante: España.
Inventor/es: PALOMARES CABRERO,José.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E04H17/00 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04H EDIFICIOS O CONSTRUCCIONES SIMILARES PARA EMPLEOS PARTICULARES; PISCINAS PARA NADAR O PARA CHAPOTEAR; MASTILES; BARRERAS; TIENDAS O REFUGIOS PROVISIONALES, EN GENERAL (cimentaciones E02D). › Cerramientos, p. ej. empalizadas, cercados, corrales (características particulares de los cerramientos electrificados A01K 3/00, H05C; medios para permitir el paso a través de los cerramientos, barreras o análogos E06B 11/00).
Descripción:
de la invención
Ei problema técnico que resuelve la presente invención es conseguir un sistema anti-salto, que pueda proteger todo tipo de propiedades privadas o incluso fronteras, dificultando aún más, el intento de intrusión en dichas propiedades. Para ello, ei sistema anti-salto, objeto de la presente memoria, está caracterizado por comprender una valla fijada a ia superficie del terreno gracias a al menos dos postes de sujeción que sirven a su vez como soporte de tres rodillos que se mueven sobre su propio eje, y un cuarto rodillo motorizado, situado en el extremo superior de la valia, presentando un movimiento uniforme mientras que se encuentra activo; donde el rodillo motorizado se encuentra asociado a unos medios electrónicos, encargados de activar dicho rodillo motorizado y unos medios sonoros, una vez que al menos un detector de proximidad detecta la presencia de un extraño.
Gracias a su especial diseño, y su colocación, a una altura determinada de entre tres y cinco metros de altura, el sistema aquí propuesto reduce fas posibilidades de éxito de un salto a la valla que sirve como base de la invención, a prácticamente cero.
A lo largo de la descripción y las reivindicaciones la palabra "comprende" y sus variantes no pretenden excluir otras características técnicas, aditivos, componentes o pasos. Para los expertos en la materia, otros objetos, ventajas y características de la invención se desprenderán en parte de la descripción y en parte de la práctica de la invención. Los siguientes ejemplos y dibujos se proporcionan a modo de ilustración, y no se pretende que restrinjan la presente invención. Además, la presente invención cubre todas las posibles combinaciones de realizaciones particulares y preferidas aquí indicadas.
Breve descripción de las figuras
A continuación se pasa a describir de manera muy breve una sene de dibujos que ayudan a comprender mejor la invención y que se relacionan expresamente con una realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.
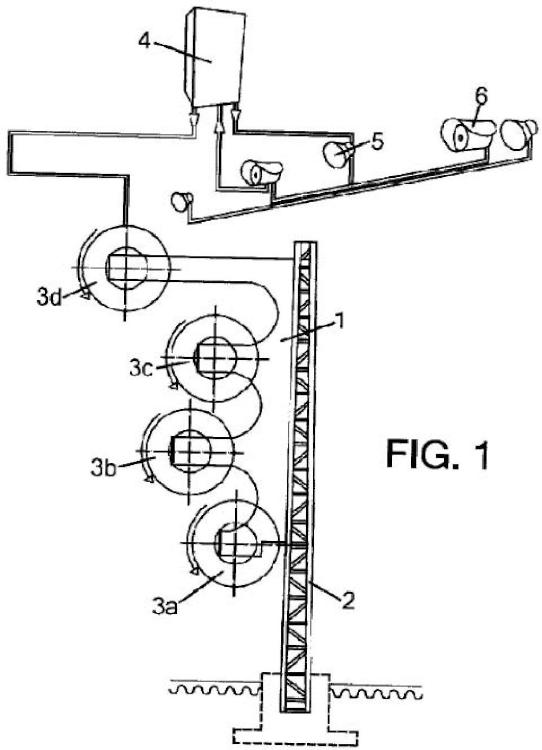
FIG 1. Muestra una vista esquemática del sistema anti-salto, objeto de la presente memoria. FIG2. Muestra una vista en sección de los rodillos (3a, 3b, 3c, 3d) que componen el sistema anti-salto, objeto de la presente memoria.
Realización preferente de la invención
En las figuras adjuntas se muestra una realización preferida de la invención. Más concretamente, el sistema anti-salto, objeto de la presente memoria está caracterizado por comprender una valla (1) fijada a la superficie del terreno, por al menos dos postes de sujeción (2) que sirven como soporte para tres rodillos (3a, 3b, 3c) de acero que se mueven sobre su propio eje, una vez que alguien intenta apoyarse en él, y un cuarto rodillo motorizado (3d), situado en el extremo superior de la valla (1), presentando un movimiento uniforme mientras que se encuentra activo.
En una primera realización práctica, el primero de los rodillos (3a) estará colocado a aproximadamente quince centímetros del eje definido por ios postes de sujeción (2), superiormente a dicho primer rodillo (3a) y a una distancia aproximada, en su vertical de seis centímetros, se coloca el segundo de los rodillos (3b) que se encuentra separado a una distancia de los postes (2) de aproximadamente ciento cincuenta centímetros; y donde a su vez, se encuentra separado verticalmente a una distancia de seis centímetros del tercer
rodillo (3c) que se encuentra separado de los postes aproximadamente den centímetros, tal y como se muestra en la figura 1.
Y donde finalmente, el rodillo motorizado (3d) se encuentra situado en fa parte superior de la 5 valla (1), a una distancia de seis centímetros de forma vertical frente al tercer de los rodillos (3c) y a una distanda de ios postes de doscientos centímetros aproximadamente.
El rodillo motorizado (3d) se encuentra asociado a unos medios electrónicos (4), que están encargados de activar dicho rodillo motorizado (3d) y unos medios sonoros (5), una vez que 10 al menos un detector de proximidad (6) detecta la presencia de un extraño.
En una realización preferida, los rodillos (3a, 3b, 3c, 3d) tendrán un diámetro aproximado de cien centímetros y su superficie será lisa, lo que dificultará el acceso a (os mismos, dificultando su superación debido a la propia inercia de rotación progresiva en una misma 15 dirección.
En una realización particular, los rodiilos (3a, 3b, 3c, 3d) tendrán una longitud aproximada del orden de entre ios 3 y 600 milímetros, y un espesor de entre 0,5 y 15 mm.
20 En una realización particular, el primero de los rodillos (3a) estará colocado a una distancia de entre tres y cinco metros del suelo, para aumentar su eficacia.
Reivindicaciones:
1.- Sistema anti-salto del tipo de los que comprenden una valla (1) caracterizado porque dicha valla (1) fijada a la superficie del terreno gracias a al menos dos postes de sujeción (2) que sirven a su vez como soporte de tres rodillos (3a, 3b, 3c) que se mueven sobre su propio eje, y un cuarto rodillo motorizado (3d), situado en el extremo superior de la valla (1), presentando un movimiento uniforme mientras que se encuentra activo; donde el rodillo motorizado (3d) se encuentra asodado a unos medios electrónicos (4), encargados de activar dicho rodillo motorizado (3d) y unos medios sonoros (5), una vez que al menos un detector de proximidad (6) detecta la presencia de un extraño.
2.- Sistema de acuerdo con la reivindicadón 1 en donde el primero de los rodillos (3a) está colocado a quince centímetros del eje definido por los postes de sujedón (2).
3.- Sistema de acuerdo con cualquiera de las reivindicadones 1-2 en donde el segundo de tos rodillos (3b) se encuentra colocado a ciento cincuenta centímetros del eje definido por los postes de sujeción (2).
4.- Sistema de acuerdo con cualquiera de las reivindicaciones 1-3 en donde el tercer rodillos (3c) se encuentra colocado a den centímetros del eje definido por los postes de sujeción (2).
5.- Sistema de acuerdo con cualquiera de las reivindicaciones 1-4 en donde el rodillo motorizado (3d) se encuentra situado en la parte superior de la valia (1) a una distanda de dos cientos centímetros del eje definido por los postes de sujedón (2).
6.- Sistema de acuerdo con cualquiera de las reivindicadones 1-5 en donde los rodillos (3a, 3b, 3c, 3d) tienen un diámetro de cien centímetros.
7.- Sistema de acuerdo con cualquiera de las reivindicadones 1-6 en donde los rodillos (3a, 3b, 3c, 3d) están separados entre sí, verticalmente, a una distancia de seis centímetros.
8.- Sistema de acuerdo con cualquiera de las reivindicaciones 1-7 en donde los rodillos (3a, 3b, 3c, 3d) tienen una longitud aproximada del orden de entre los 3 y 600 milímetros, y un espesor de entre 0,5 y 15 mm.
5 9.- Sistema de acuerdo con cualquiera de las reivindicaciones anteriores en donde el
primer rodillo (3a) se encuentra colocado a una distancia de entre tres y cinco metros del suelo.
Patentes similares o relacionadas:
Disposición de cercado portable, del 25 de Junio de 2020, de INDUSTRIAS PONSA, S.A.: 1. Disposición de cercado portable, del tipo utilizado para delimitar perimetralmente un recinto provisional, caracterizado por el hecho de que comprende una pluralidad de […]
Herraje para puertas de cuadras, del 24 de Junio de 2020, de PORINOX SL: 1. Herraje para puertas de cuadras; comprendiendo dichos herrajes unas piezas destinadas a fijarse en extremos laterales opuestos de una puerta (P) […]
SISTEMA PROVISIONAL DE PROTECCIÓN DE BORDE, del 22 de Mayo de 2020, de REFORMAS CONTRATAS Y REDES RE-9, S.L: 1. Sistema provisional de protección de borde, caracterizada por comprender, al menos: - unos postes verticales que se fijan perimetralmente a intervalos en el borde […]
TECHO ANTISALTO PARA VALLAS DE SEGURIDAD, del 9 de Abril de 2020, de CASTELLANO YUSTE, Cayetano: Techo antisalto para vallas de seguridad, concebidas para su fijación a la estructura de la propia vaya de seguridad existente, caracterizado […]
Barrera de protección anti medusas, del 12 de Marzo de 2020, de CERDÁ, Jesus Miguel: 1. Barrera de protección anti medusas caracterizada porque comprende un flotador de configuración alargada al que está unido en toda […]
ABRAZADERA PARA CONEXIÓN A POSTE, del 25 de Febrero de 2020, de GRUPO CARLOS SERRANO VICARIO, S.L.: 1. Abrazadera para conexión a poste , que comprende una primera porción y una segunda porción , caracterizada por que la primera […]
Armazón de ajardinamiento plegable, del 11 de Septiembre de 2019, de Zhejiang Minzo New Materials Co., Ltd: Un armazón de ajardinamiento plegable, que comprende una pluralidad de primeras barras de soporte, que son paralelas entre sí y dispuestas a intervalos, en el […]
Valla frangible, del 6 de Marzo de 2019, de GRIÑAN ESTEBAN, Fernando Jesús: 1. Valla, frangible caracterizada por cumplir la característica de ser frangible abatiéndose mediante la calibración de la línea de adelgazamiento , […]