Dispositivo de seguimiento de señales de radionavegación.
Dispositivo de seguimiento de unas señales de radionavegación (10,
110, 110'), que comprende una primera etapa de seguimiento (12, 112) de una primera señal de radionavegación contenida en una señal de entrada que va a aplicarse al dispositivo, comprendiendo la primera señal de radionavegación una primera portadora a una primera frecuencia modulada por una primera forma de onda de ensanchamiento, comprendiendo dicha primera etapa de seguimiento un primer bucle de enganche de fase de portadora con un mezclador (16, 116) configurado para multiplicar la señal de entrada con una réplica local de la primera portadora, comprendiendo el primer bucle de enganche de fase de portadora un discriminador de fase de la primera portadora (32, 132) configurado para producir una primera señal de error resultante de un primer desfase entre la primera portadora y la réplica local de la primera portadora, estando el primer bucle de enganche de fase de portadora configurado para ajustar la fase de la réplica local de la primera portadora basándose en la primera señal de error;
una segunda etapa de seguimiento (14, 114) de una segunda señal de radionavegación contenida en la señal de entrada, comprendiendo la segunda señal de radionavegación una segunda portadora a una segunda frecuencia, diferente de la primera frecuencia, modulada por una segunda forma de onda de ensanchamiento, comprendiendo la segunda etapa de seguimiento un segundo bucle de enganche de fase de portadora con un mezclador (40, 140) configurado para multiplicar la señal de entrada con una réplica local de la segunda portadora, caracterizado por que el segundo bucle de enganche de fase de portadora comprende un discriminador de fase (60, 160) de una pulsación entre la primera portadora y la segunda portadora configurado para producir una segunda señal de error resultante de una diferencia entre el primer desfase y un segundo desfase entre la segunda portadora y la réplica local de la segunda portadora;
y por que el segundo bucle de enganche de fase está configurado para ajustar la fase de la réplica local de la segunda portadora basándose en la primera y segunda señales de error.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E14150652.
Solicitante: CENTRE NATIONAL D'ETUDES SPATIALES.
Inventor/es: RIES,LIONEL, PAIMBLANC,PHILIPPE, JARDAK,NABIL, VIGNEAU,WILLY, PUENGNIM,ANCHALEE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S1/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 1/00 Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00). › usando ondas de radio (G01S 19/00 tiene prioridad).
- G01S19/29 G01S […] › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › relacionado con la portadora.
- G01S19/44 G01S 19/00 […] › Resolución de la ambigüedad de la fase de la portadora; Ambigüedad flotante; método LAMBDA [Least-squares AMBiguity Decorrelation Adjustment].
PDF original: ES-2550709_T3.pdf
Fragmento de la descripción:
Dispositivo de seguimiento de señales de radionavegación.
Campo técnico
La presente invención se refiere al ámbito de la radionavegación, más precisamente a un dispositivo de seguimiento de una señal de radionavegación (o señal radioeléctrica de navegación). El campo de aplicación de la invención es concretamente la recepción de señales de radionavegación emitidas por emisores de un sistema de posicionamiento por satélite (abreviado GNSS, por "Global Navigation Satellite System"), por ejemplo GPS (del inglés "Global Positioning System), Galileo, Glonass, QZSS, Compass, IRNSS, etc.
Estado de la técnica
De manera general, las señales de radionavegación emitidas por satélites (o pseudosatélites) de un sistema de posicionamiento se presentan en forma de una portadora modulada por una forma de onda de ensanchamiento que contiene un código binario pseudoaleatorio. Al provocar la modulación de la portadora el ensanchamiento del espectro alrededor de la frecuencia de la portadora, las señales de radionavegación se denominan a menudo "de espectro ensanchado". Los códigos pseudoaleatorios representan un identificador de la señal y, por tanto, del satélite emisor. Con receptores conocidos, les permiten un acceso múltiple por división de código (AMRC). De manera accesoria, determinadas señales de posicionamiento por satélite también pueden transportar datos útiles (por ejemplo, el mensaje de navegación) en forma de una secuencia binaria (a un ritmo netamente menos elevado que el código pseudoaleatorio) modulada además en la portadora. En lo sucesivo se hará caso omiso de esta carga de datos útiles.
En el caso de GPS, las señales de radionavegación se transmiten en las bandas de frecuencias L1, centrada en 1575,42 MHz, L2, centrada en 1227,6 MHz, y L5, centrada en 1176,45 MHz. Los satélites del GNSS europeo (también conocido con el nombre de Galileo) transmitirán en las bandas E2-L1-E1 (siendo la sección de banda media L1 la misma que la del GPS), E5a (que, según la nomenclatura Galileo, representa la banda L5 prevista para el GPS), E5b (centrada en 1207,14 MHz) y E6 (centrada en 1278,75 MHz). En lo sucesivo, las bandas E5a y E5b se considerarán en conjunto como banda E5, con 1191,795 MHz como frecuencia central. Para el caso de las señales abiertas de Galileo, puede encontrarse su descripción completa en el "Galileo Open Service Signal-ln-Space Interface Control Document", o Galileo OS SIS ICD, disponible en el sitio web http://ec.europa.eu/enterprise/policies/satnav/galileo/open-service/index_en.htm . Puede observarse incluso que los satélites de la constelación Compass transmiten o transmitirán en la banda B1 (centrada en 1561,098 MHz), B1-2 (centrada en 1589,742 MHz), L1 (centrada en 1575,42 MHz), B2 (centrada en 1207,14 MHz) y B3 (centrada en 1268,52 MHz). El sistema GLONASS utiliza las frecuencias centrales 1602 MHz y 1246 MHz. Las frecuencias centrales indicadas representan las frecuencias de las portadoras de las diferentes señales.
La recepción de una señal de radionavegación comprende normalmente una multiplicación de la señal recibida por una réplica interna de la portadora generada en el receptor por un oscilador controlado por un bucle de seguimiento de portadora y otra multiplicación por una réplica interna de la forma de onda de ensanchamiento producida por un generador de forma de onda controlado por un bucle de seguimiento de forma de onda de ensanchamiento (denominado también "bucle de seguimiento de código"). Las señales de error o de realimentación de los bucles de seguimiento de portadora y de forma de onda de ensanchamiento se utilizan por el receptor para determinar su posición. La señal de desfase entre la portadora de la señal recibida y la réplica interna de portadora producida en cada periodo de tiempo por el bucle de seguimiento de portadora proporciona una primera medición u observable (la medición o la observable de fase). La señal de desviación temporal entre la forma de onda de ensanchamiento de la señal recibida y la réplica interna de forma de onda de ensanchamiento producida en cada periodo de tiempo por el bucle de seguimiento de forma de onda de ensanchamiento representa una segunda medición u observable (la medición o la observable de código).
La observable de fase no se utiliza por todos los receptores. Sobre todo, los receptores de bajo coste determinan su posición únicamente basándose en observaciones de código. Las mediciones de fase se ponen en práctica, por ejemplo, en los métodos RTK (del inglés: "Real Time Kinematic") y PPP (del inglés: "Precise Point Positioning").
Las mediciones de código son de una precisión métrica mientras que las mediciones de fase son de una precisión de algunos mm. No obstante, las mediciones de fase presentan el gran inconveniente de que son ambiguas en el sentido de que al principio se desconoce el número de ciclos enteros entre el satélite y el receptor. Las mediciones de fase son módulo de un ciclo y sólo entregan la parte real de la diferencia de fase de la portadora entre la emisión por el satélite y el receptor. Con el fin de poder beneficiarse de la precisión de las mediciones de fase, un receptor debe resolver las ambigüedades de las que adolecen.
El seguimiento de la fase de la portadora de una señal de radionavegación es muy sensible a las condiciones del entorno. El riesgo de pérdida es mucho más elevado que para el seguimiento del código. Además, la gestión de los saltos de ciclo es una tarea difícil. En un entorno difícil (por ejemplo en el medio urbano), la disponibilidad de las
mediciones de fase corre el riesgo de ser muy baja, lo que reduce enormemente el interés de los receptores que pueden efectuar y tratar observaciones de fase.
A modo de ejemplo, los siguientes documentos analizan la medición de fase y la resolución de los ambigüedades: documento US 2003/0058163, US 2005/0101248, US 3.883.873 y "Analysis of Three-Carrier Ambiguity Resolutlon Technlque for precise relative positioning in GNSS-2" de U. VOLLATH et al., en NAVIGATION, Journal of the Instltute of Navigation, Fairfax, VA, EE.UU., vol. 6, n.° 1, 21 de marzo de 1999 - páginas 13-23.
Objeto de la invención
Un objeto de la presente invención es aumentar la robustez de las mediciones de fase.
Descripción general de la invención
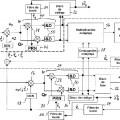
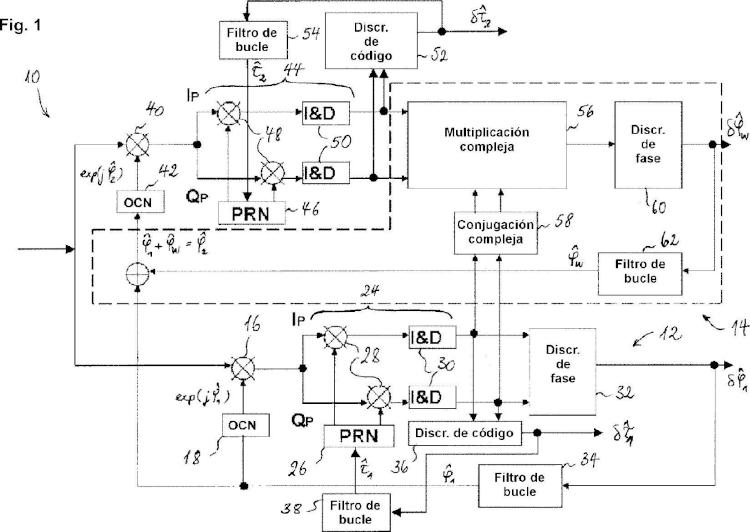
Según la Invención, se propone un dispositivo de seguimiento de señales de radionavegación que comprende una primera etapa de seguimiento de una primera señal de radionavegación contenida en una señal de entrada que va a aplicarse al dispositivo y una segunda etapa de seguimiento de una segunda señal de radionavegación contenida en la señal de entrada. La primera señal de radionavegación se supone que comprende una primera portadora a una primera frecuencia modulada por una primera forma de onda de ensanchamiento, mientras que la segunda señal de radionavegación se supone que comprende una segunda portadora a una segunda frecuencia, diferente de la primera frecuencia, modulada por una segunda forma de onda de ensanchamiento. La primera etapa de seguimiento comprende un primer bucle de enganche de fase de portadora con un mezclador configurado para multiplicar la señal de entrada con una réplica local de la primera portadora. El primer bucle de enganche de fase de portadora comprende un discñminador de fase de la primera portadora configurado para producir una primera señal de error resultante de un primer desfase entre la primera portadora y la réplica local de la primera portadora. El primer bucle de enganche de fase de portadora está configurado para ajustar la fase de la réplica local de la primera portadora basándose en la primera señal de error. La segunda etapa de seguimiento comprende un segundo bucle de enganche de fase de portadora con un mezclador configurado para multiplicar la señal de entrada con una réplica local de la segunda portadora. El segundo bucle de enganche de fase de portadora comprende un discriminador de la fase de la pulsación entre la primera portadora y la segunda portadora configurado para producir una segunda señal de error resultante de una diferencia entre el primer desfase y un segundo desfase entre la segunda portadora y la réplica local de la segunda portadora. El segundo bucle de enganche de fase está configurado para ajustar la fase de la réplica local de la segunda portadora basándose en las señales de error primera y segunda.
Se observa que el dispositivo según la invención puede emplearse en el marco de un receptor GNSS bifrecuencia o multlfrecuencia. En lugar de hacer un seguimiento de las señales de radionavegación primera y segunda de manera individual (es decir, mediante bucles de seguimiento de fase separados), el dispositivo de seguimiento... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de seguimiento de unas señales de radionavegación (10, 110, 110), que comprende una primera etapa de seguimiento (12, 112) de una primera señal de radionavegación contenida en una señal de entrada que va a aplicarse al dispositivo, comprendiendo la primera señal de radionavegación una primera portadora a una primera frecuencia modulada por una primera forma de onda de ensanchamiento, comprendiendo dicha primera etapa de seguimiento un primer bucle de enganche de fase de portadora con un mezclador (16, 116) configurado para multiplicar la señal de entrada con una réplica local de la primera portadora, comprendiendo el primer bucle de enganche de fase de portadora un discriminador de fase de la primera portadora (32, 132) configurado para producir una primera señal de error resultante de un primer desfase entre la primera portadora y la réplica local de la primera portadora, estando el primer bucle de enganche de fase de portadora configurado para ajustar la fase de la réplica local de la primera portadora basándose en la primera señal de error;
una segunda etapa de seguimiento (14, 114) de una segunda señal de radionavegación contenida en la señal de entrada, comprendiendo la segunda señal de radionavegación una segunda portadora a una segunda frecuencia, diferente de la primera frecuencia, modulada por una segunda forma de onda de ensanchamiento, comprendiendo la segunda etapa de seguimiento un segundo bucle de enganche de fase de portadora con un mezclador (40, 140) configurado para multiplicar la señal de entrada con una réplica local de la segunda portadora, caracterizado por que el segundo bucle de enganche de fase de portadora comprende un discriminador de fase (60, 160) de una pulsación entre la primera portadora y la segunda portadora configurado para producir una segunda señal de error resultante de una diferencia entre el primer desfase y un segundo desfase entre la segunda portadora y la réplica local de la segunda portadora;
y por que el segundo bucle de enganche de fase está configurado para ajustar la fase de la réplica local de la segunda portadora basándose en la primera y segunda señales de error.
2. Dispositivo según la reivindicación 1, en el que el primer bucle de enganche de fase comprende un oscilador de control numérico (18, 118), controlado por un primer filtro (34, 134) que recibe la primera señal de error en la entrada.
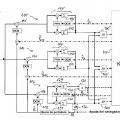
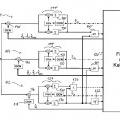
3. Dispositivo según la reivindicación 2, en el que el segundo bucle de enganche de fase comprende un oscilador de control numérico (42) controlado por el primer filtro (34, 134) y un segundo filtro (62, 120, 120) que recibe la segunda señal de error en la entrada; y comprendiendo preferentemente el segundo filtro un filtro de Kalman, un filtro de Kalman ensanchado (120, 120) o un filtro particular.
4. Dispositivo según cualquiera de las reivindicaciones 1 a 3, en el que la primera y segunda señales de radionavegación se seleccionan de entre las señales Galileo E1, E5 y E6 o de entre las señales GPS L5, L2C y L1 o de entre las señales GLONASS L3, G2 y G1; y siendo preferentemente la primera señal de radionavegación una señal Galileo E5, y siendo la segunda señal de radionavegación una señal Galileo E1 o una señal Galileo E6.
5. Dispositivo según cualquiera de las reivindicaciones 1 a 4, en el que la primera etapa de seguimiento comprende un primer correlador (30, 130) configurado para correlacionar una réplica local de la primera forma de onda de ensanchamiento con la señal de entrada multiplicada por la réplica local de la primera portadora, y en el que el discriminador de fase (32, 132) de la primera portadora determina la primera señal de error basándose en un resultado de correlación producido por el primer correlador (30, 130).
6. Dispositivo según la reivindicación 5, en el que la segunda etapa de seguimiento comprende un segundo correlador (50, 150) configurado para correlacionar una réplica local de la segunda forma de onda de ensanchamiento con la señal de entrada multiplicada por la réplica local de la segunda portadora, y en el que el discriminador de fase (60, 160) de la pulsación entre la primera portadora y la segunda portadora determina la segunda señal de error basándose en el resultado de correlación producido por el primer correlador y en un resultado de correlación producido por el segundo correlador (50, 150).
7. Dispositivo según la reivindicación 6, en el que el discriminador de fase (60, 160) de la pulsación entre la primera portadora y la segunda portadora está configurado para utilizar el producto del resultado de correlación producido por el primer correlador (30, 130) y del conjugado complejo del resultado de correlación producido por el segundo correlador (50, 150) o el producto del conjugado complejo del resultado de correlación producido por el primer correlador (30, 130) y del resultado de correlación producido por el segundo correlador (50, 150) para producir la segunda señal de error.
8. Dispositivo según cualquiera de las reivindicaciones 1 a 7, que comprende una tercera etapa de seguimiento (114, 114) de una tercera señal de radionavegación contenida en la señal de entrada, comprendiendo la tercera señal de radionavegación una tercera portadora a una tercera frecuencia, diferente de la primera y segunda frecuencias, modulada por una tercera forma de onda de ensanchamiento, comprendiendo la tercera etapa de seguimiento un tercer bucle de enganche de fase de portadora con un mezclador (140) configurado para multiplicar la señal de entrada con una réplica local de la tercera portadora,
comprendiendo el tercer bucle de enganche de fase de portadora un dlscrlmlnador de fase (160) de una pulsación entre la primera portadora y la tercera portadora configurado para producir una tercera señal de error resultante de una diferencia entre el primer desfase y un tercer desfase entre la tercera portadora y la réplica local de la tercera portadora;
y estando el tercer bucle de enganche de fase configurado para ajustar la fase de la réplica local de la tercera portadora basándose en la primera y tercera señales de error.
9. Dispositivo según la reivindicación 8, en el que el tercer bucle de enganche de fase comprende un oscilador de control numérico controlado por el primer filtro (134) y un tercer filtro (120, 120) que recibe la tercera señal de error en la entrada.
10. Dispositivo según la reivindicación 8 cuando depende de la reivindicación 3, en el que el tercer bucle de enganche de fase comprende un oscilador de control numérico controlado por el filtro de Kalman, el filtro de Kalman ensanchado (120, 120) o el filtro particular.
11. Dispositivo según cualquiera de las reivindicaciones 8 a 10, cuando depende de la reivindicación 5, en el que la tercera etapa de seguimiento comprende un tercer correlador (150) configurado para correlacionar una réplica local de la tercera forma de onda de ensanchamiento con la señal de entrada multiplicada por la réplica local de la tercera portadora, y en el que el dlscriminador de fase (160) de la pulsación entre la primera portadora y la tercera portadora determina la tercera señal de error basándose en el resultado de correlación producido por el primer correlador (130) y en un resultado de correlación producido por el tercer correlador (150).
12. Dispositivo según la reivindicación 11, en el que el discriminador de fase (160) de la pulsación entre la primera portadora y la tercera portadora está configurado para utilizar el producto del resultado de correlación producido por el primer correlador (130) y del conjugado complejo del resultado de correlación producido por el tercer correlador (150) o el producto del conjugado complejo del resultado de correlación producido por el primer correlador (130) y del resultado de correlación producido por el tercer correlador (150) para producir la tercera señal de error.
13. Dispositivo según cualquiera de las reivindicaciones 1 a 12, realizado mediante un procesador de señales digitales.
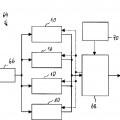
14. Receptor (64) GNSS, que comprende uno o varios dispositivos de seguimiento de señales de radionavegación (10, 110, 110) según cualquiera de las reivindicaciones 1 a 13.
15. Dispositivo de posicionamiento y/o de temporización que incluye un receptor (64) GNSS según la reivindicación 14.
Patentes similares o relacionadas:
Mejoras en sistema electrónico antirrobo para el control, identificación y detección del fruto del olivar, del 20 de Enero de 2020, de OLIDETEC TECHNOLOGY, S.L: Mejoras en sistema electrónico antirrobo para el control, identificación y detección del fruto del olivar. Constituida a partir de un sistema electrónico encapsulado […]
Procedimiento de generación de una cartografía de cobertura de emisión o de recepción de una antena de una estación de tierra para enlaces por satélite, del 9 de Enero de 2019, de EUTELSAT S.A.: Procedimiento de medida de ganancias de antena de un emisor (E1) de una primera estación terrena (ST1) para la generación de al menos una cartografía de cobertura de dicha antena, […]
Sistema de seguimiento de localización adaptativo, del 22 de Febrero de 2017, de 9Solutions Oy: Un nodo (100 a 118) de seguimiento de localización para un sistema de seguimiento de localización que comprende una pluralidad de nodos (100 a 118) de seguimiento […]
Métodos y aparatos para mitigar la interferencia por sobrevuelo en sistema de aterrizaje con instrumentos, del 5 de Octubre de 2016, de THE BOEING COMPANY: Método, que comprende: realizar una primera medición de una posición de una aeronave relativa a una primera ubicación en base a un sistema de aterrizaje con […]
Manejo de unidades de datos en paquetes, del 13 de Abril de 2016, de Nokia Technologies OY: Un método que comprende: proporcionar una primera unidad de datos en paquetes para transmisión como parte de un primer paquete de anuncio de baja energía de Bluetooth, incluyendo […]
 Establecimiento de llamada de telecomunicación de medios mixtos, del 18 de Marzo de 2016, de 3G Licensing S.A: Estación móvil apta para videotelefonía en respuesta a una interrupción de una llamada en curso de telecomunicaciones de medios mixtos, comprendiendo […]
Establecimiento de llamada de telecomunicación de medios mixtos, del 18 de Marzo de 2016, de 3G Licensing S.A: Estación móvil apta para videotelefonía en respuesta a una interrupción de una llamada en curso de telecomunicaciones de medios mixtos, comprendiendo […]
Método para la localización en interiores basado en cambios de potencia de emisores de redes inalámbricos, del 11 de Noviembre de 2015, de UNIVERSIDAD POLITECNICA DE MADRID: La presente invención consiste en cambiar la potencia de emisión de los dispositivos que crean redes inalámbricas, medir estos cambios en un dispositivo móvil y, a partir […]
 SISTEMA LOCALIZADOR QUE UTILIZA RADIOBALIZAS PERSONALES, del 7 de Enero de 2011, de INDRA SISTEMAS, S.A.: Sistema localizador que utiliza radiobalizas personales. El sistema comprende también al menos un dispositivo controlador-receptor con una antena y una antena-receptor […]
SISTEMA LOCALIZADOR QUE UTILIZA RADIOBALIZAS PERSONALES, del 7 de Enero de 2011, de INDRA SISTEMAS, S.A.: Sistema localizador que utiliza radiobalizas personales. El sistema comprende también al menos un dispositivo controlador-receptor con una antena y una antena-receptor […]