Seguidor de velocidad adaptativa.
La publicación está dirigida a un sistema de seguimiento a dos ejes de alta precisión que tiene velocidad angular adaptativa y comprende:
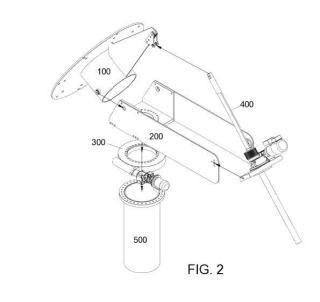
un pedestal unido a una cimentación; un accionador de giro acimutal que comprende un dispositivo modular de accionamiento en rotación que está operativamente acoplado al pedestal; una horquilla acimutal que está operativamente acoplada al accionador de giro acimutal y acoplada de manera articulada a un cubo de elevación; un cubo de elevación que comprende un dispositivo modular de accionamiento lineal en elevación que está operativamente acoplado a la horquilla acimutal; un aparato direccional que está configurado para ser apuntado con precisión hacia un objetivo y acoplado al cubo de elevación; y un procesador acoplado al sistema de seguimiento.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231951.
Solicitante: VERTEX ENGINEERING LTD.
Nacionalidad solicitante: Israel.
Dirección: 18 HaMelacha 48091 Rosh Hayin ISRAEL.
Inventor/es: BERTOCCHI,RODOLFO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F24J2/54
- G05D3/00 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › Control de la posición o de la dirección (G05D 1/00 tiene prioridad; control de programa numérico G05B 19/18).
Fragmento de la descripción:
Seguidor de velocidad adaptativa
Antecedentes [0001] La publicación se refiere en términos generales a los sistemas de seguimiento espacial, y más en particular, a los sistemas de seguimiento a dos ejes controlados numéricamente.
Los actuales dispositivos de seguimiento de precisión con precisiones de apuntamiento mejores que la de 1 milirradián (mrad) pueden en general dividirse en tres familias: (I) los dispositivos de seguimiento para vehículos voladores y/o misiles u otros objetivos que se muevan con relativa rapidez, (II) los dispositivos de seguimiento para satélites que orbitan la Tierra (a pequeña o gran altura) u otros objetivos cuasi estáticos, y (III) los dispositivos de seguimiento para cuerpos astronómicos u otros objetivos virtualmente estáticos. La principal diferencia entre los tipos de familias de dispositivos de seguimiento radica en la velocidad angular y la aceleración angular del objetivo rastreado. Se considera que debido a su baja precisión son irrelevantes para la siguiente exposición los así llamados “seguidores solares” para simples aplicaciones fotovoltaicas de paneles planos u otros sistemas rudimentarios.
Son aplicaciones representativas de la primera familia de dispositivos de seguimiento los sistemas radáricos y los sistemas de defensa antiaérea. Dichos sistemas requieren altas velocidades angulares para rastrear objetivos relativamente cercanos que se mueven con rapidez, especialmente a bajas altitudes, lo cual requiere sacrificar precisión de apuntamiento a cambio de unas altas aceleraciones y velocidades angulares de rotación de los ejes acimutal y de elevación. Las típicas velocidades y precisiones angulares de un sistema de seguimiento de este tipo pueden estar representadas por el seguidor ORBIT AL-4048, que puede alcanzar velocidades angulares de 15 grados/seg. con una precisión de apuntamiento de ± 1 mrad.
Un ejemplo de la segunda familia, como p. ej. los seguidores de satélites que orbitan la Tierra, es el sistema de antenas de 18, 3 metros General Dynamics VA. El mismo tiene un pedestal de cabeza giratoria en una configuración de elevación sobre acimut. Para este sistema específico la amplitud de rotación acimutal está limitada a 270 grados, mientras que la amplitud de elevación es de 0-90 grados. La precisión de apuntamiento de dicho sistema es de ± 0, 4 mrad. Las velocidades angulares indicadas por el fabricante son de 1, 5 grados/seg. en acimut y 10 grados/seg. en elevación. El sistema de seguimiento está montado en una torre de hormigón. El sistema que se describe es, por consiguiente, muy pesado, pesando la antena 27 toneladas métricas y el pedestal 32 toneladas métricas. Además, la potencia eléctrica requerida para hacer funcionar al sistema es de 120 kVA.
Los telescopios espaciales y las antenas de espacio profundo representan la tercera familia de dispositivos de seguimiento, en los que el objetivo rastreado es distante y virtualmente estático y tiene un muy pequeño ángulo de visión, lo cual exige una muy alta precisión de apuntamiento, de 0, 01-0, 1 mrad. Tal alta precisión de apuntamiento puede típicamente lograrse sacrificando velocidad angular a cambio de precisión de apuntamiento. Puede considerarse que el diseño de antena de diez metros del Observatorio Nacional de Radioastronomía (NRAO) representa un aspecto del actual estado de la técnica en el diseño de dispositivos de seguimiento para apuntamiento de alta precisión. La supuesta precisión de apuntamiento de dicha antena es de aproximadamente 5 μrad a una supuesta velocidad angular máxima de 6 grados/seg. El seguimiento a dos ejes es llevado a cabo por un sistema de elevación sobre acimut, con una horquilla para permitir la elevación y un cojinete plano para el movimiento acimutal. La horquilla está fabricada a base de placas de acero soldadas, lo cual ocasiona grandes tensiones internas que son debidas al proceso de soldadura y no pueden ser eliminadas mediante atemperación y/o recocido debido al riesgo de deformaciones estructurales.
Análogamente, el cojinete acimutal de esta antena tiene un diámetro de 2, 4 m y se deforma a no ser que esté cargado uniformemente. Además, a no ser que las caras de montaje del cojinete sean lo suficientemente rígidas, el peso de la estructura hará que el cojinete se deforme independientemente de cómo de planas hayan sido mecanizadas las superficies de montaje.
En los sistemas de seguimiento anteriormente mencionados ambos ejes de elevación y acimutal son accionados por similares accionadores de fricción que actúan en un anillo de accionamiento de cada eje respectivo. Esta metodología de controlar el ángulo acimutal y de elevación adolece de varios problemas: (I) Un único accionador de fricción puede no ser suficiente para superar la fricción inherente del sistema; (II) ese mismo accionador de fricción puede “quemarse” si la fricción de accionamiento alcanza un pico transitorio debido a abruptas cargas externas tales como ráfagas de viento (especialmente con las antenas de gran diámetro) o a un desequilibrio en la distribución de la masa; (III) la rigidez del accionador puede ser insuficiente a no ser que se usen (costosos) ejes con rodillos de carburo;
(IV) hay riesgo de “soldadura” entre el rodillo de accionamiento y la rueda de accionamiento; y (V) pueden generarse excesivas cargas de empuje a no ser que el eje del rodillo esté muy cuidadosamente alineado, reduciéndose la tolerancia a los defectos de todo el sistema. Para resumir, el propuesto dispositivo de seguimiento del sistema anteriormente mencionado es muy grande y pesado, tiene grandes tensiones internas de soldadura que no pueden ser aliviadas sin correr el riesgo de que se produzcan deformaciones estructurales, y su sistema de accionamiento es probable que falle o se deteriore al verse sometido a cargas desequilibradas.
Una metodología alternativa para apuntar una gran antena puede ser la de la antena de 34 metros de la “Estación de Espacio Profundo 15: Uranus” de la Jet Propulsion Lab. La misma está equipada con un tipo de dispositivo de seguimiento con accionamiento eléctrico en acimut-elevación. La antena gira en acimut sobre cuatro conjuntos de ruedas autoalineantes que ruedan sobre una pista circular de acero nivelada con precisión. La pista es mantenida en su sitio por 16 tirantes tangenciales que se unen a un pedestal de hormigón reforzado centralmente. La estructura de acero de la antena está unida a una rueda de engranaje principal de elevación que la sube y la baja. La velocidad de funcionamiento de esta antena es de 0, 4 grados/seg. tanto para acimut como para elevación. Resulta obvio por lo expuesto anteriormente que si bien ésta es una solución aceptable para antenas muy grandes y pesadas (del orden de cientos de toneladas métricas) , es demasiado complicada y costosa para antenas comerciales.
En consecuencia, surge la necesidad de un sistema de seguimiento donde independientemente de la distancia al objetivo no se vea comprometida la precisión de apuntamiento, siendo con ello el sistema capaz de rastrear objetivos que van desde los aviones que se mueven con rapidez hasta las entidades astronómicas virtualmente estáticas, haciéndolo a un coste y con una complejidad considerablemente reducidos mientras que mantiene el requerido nivel de precisión de apuntamiento.
Breve exposición de la invención [0010] Se describen en varias realizaciones sistemas de seguimiento espacial. Específicamente, la publicación se refiere a los sistemas de seguimiento a dos ejes controlados numéricamente.
En una realización, se aporta aquí un sistema de seguimiento de alta precisión que tiene velocidad angular a dos ejes adaptativa y comprende: un pedestal unido a una cimentación; un accionador de giro acimutal que comprende un dispositivo de accionamiento en rotación modular que está operativamente unido al pedestal; una horquilla acimutal que tiene un lado anterior y un lado posterior y está operativamente acoplada al accionamiento de giro acimutal en el lado anterior y acoplada mediante articulación a un cubo de elevación que comprende un dispositivo de accionamiento en elevación modular que está operativamente acoplado a la horquilla acimutal; un aparato direccional que está configurado para ser apuntado con precisión hacia un objetivo y está operativamente acoplado al cubo de elevación; y un procesador que está operativamente acoplado al sistema de seguimiento.
En otra realización, se aporta aquí una agrupación que comprende a una pluralidad de sistemas de seguimiento como los aquí descritos, estando los sistemas de seguimiento en comunicación electrónica con una unidad central de proceso de la agrupación (CCPU) .
En otra...
Reivindicaciones:
1. Sistema de seguimiento a dos ejes de alta precisión que tiene velocidades angulares adaptativas y comprende: una unidad tipo pedestal unida a una cimentación; un cubo de elevación que cuenta con un grado de libertad en rotación horizontal; una horquilla acimutal operativamente acoplada al cubo de elevación; una unidad que constituye un accionador de giro acimutal para el posicionamiento acimutal y comprende un anillo interior y un anillo exterior, estando un anillo acoplado al pedestal y estando un anillo acoplado a la horquilla acimutal; una unidad que constituye un accionador lineal de mecanismo de tornillo sin fin para el posicionamiento en elevación y está simultáneamente acoplada al cubo de elevación y a la horquilla acimutal; un aparato direccional que se apunta con precisión hacia un objetivo; codificadores operativamente acoplados a los ejes de rotación; y una unidad de procesamiento para controlar el sistema de seguimiento y ponerlo en red con correspondientes sistemas auxiliares.
2. El sistema de la reivindicación 1, en donde dicho aparato direccional puede ser una antena de forma arbitraria, un concentrador de energía de tipo paraboloide, un concentrador de energía de forma arbitraria, un dispositivo de apuntamiento, un dispositivo de iluminación, un dispositivo de escucha, un dispositivo microfónico, un dispositivo de obtención de imágenes, un dispositivo de recolección o transmisión de datos o cualquier aparato que requiera para su funcionamiento el continuo y preciso posicionamiento en acimut y en elevación.
3. El sistema de la reivindicación 1, en donde dicho cubo de elevación comprende: una superficie de montaje plana que está en mutuo acoplamiento con el aparato direccional; un alojamiento en general cilíndrico unido a dicha superficie plana de montaje; un cuerno plano saliente de control rígidamente unido a dicho alojamiento cilíndrico, estando operativamente acoplado a un accionador lineal de tornillo sin fin; y un eje horizontal que sobresale de dicho alojamiento estando soportado por al menos un cojinete y operativamente acoplado a la horquilla acimutal.
4. El sistema de la reivindicación 3, en donde dicho cuerno de control es de sección transversal progresivamente decreciente y alargado y está situado encima del eje horizontal de rotación con la finalidad de incrementar el momento de elevación del accionador lineal de tornillo sin fin, asegurando que dicho tornillo sin fin lineal se vea sometido a carga solamente en tracción, eliminando así el sobredimensionado de dicho tornillo sin fin lineal debido al pandeo por esbeltez de Euler.
5. El sistema de la reivindicación 1, en donde la horquilla acimutal consta de placas metálicas en general planas que incorporan medios de acoplamiento mutuo para el accionador de giro acimutal, el accionador lineal de tornillo sin fin, el cubo de elevación, una pluralidad de cajas de control y dispositivos de encaminamiento.
6. El sistema de la reivindicación 5, en donde la horquilla acimutal se extiende hacia atrás haciendo de lastre para el aparato direccional, aliviando así en general el momento de elevación con respecto al eje horizontal.
7. El sistema de la reivindicación 1, en donde dicha unidad que constituye el pedestal puede estar fabricada a base de metal o de hormigón o bien a base de una combinación de dichos materiales y puede estar adicionalmente rigidizada por medio de un arriostramiento externo o interno que comprenda una combinación de alambres, cables, tubos, barras o riostras.
8. El sistema de la reivindicación 1, en donde el accionador de giro acimutal es accionado por un motor eléctrico controlable y/o reversible, un dispositivo neumático, un dispositivo hidráulico o un dispositivo que comprenda al menos a uno de los anteriormente mencionados.
9. El sistema de la reivindicación 8, en donde el accionador motorizado de giro acimutal está equipado con un tren de unidades modulares de transmisión por engranaje conectadas en serie, siendo dichas unidades modulares de transmisión por engranaje rápidamente intercambiables y/o sustituibles con la finalidad de modificar la velocidad angular de dicha unidad que constituye el accionador de giro acimutal por el procedimiento de adaptar la relación de transmisión de entrada total en respuesta a las variables exigencias en materia de la velocidad angular acimutal.
10. El sistema de la reivindicación 8, en donde el accionador motorizado de giro acimutal está equipado con un dispositivo de fricción variable, un dispositivo limitador de par, un dispositivo con pasador de seguridad o un dispositivo de embrague o bien con una combinación de los mismos que es capaz de desconectar la unidad de constituye el accionador de giro acimutal del tren de unidades modulares de transmisión por engranaje al darse
un par predefinido, permitiéndole así a la transmisión por engranaje del giro acimutal pasar a una posición acimutal equilibrada de par mínimo.
11. El sistema de la reivindicación 1, en donde la unidad que constituye el accionador lineal de tornillo sin fin es accionada por medio de al menos un motor eléctrico controlable/reversible, un dispositivo neumático o un dispositivo hidráulico o una combinación de los mismos.
12. El sistema de la reivindicación 1, en donde el accionador lineal de tornillo sin fin está operativamente acoplado al cubo de elevación por medio de un ojete del extremo del vástago y a la horquilla acimutal por medio de una montura con muñones soportada en cojinetes.
13. El sistema de la reivindicación 11, en donde la unidad motorizada que constituye el engranaje lineal de sinfín y corona está equipada con un tren de unidades modulares de transmisión por engranaje conectadas en serie, siendo dichas unidades modulares de transmisión por engranaje rápidamente intercambiables y/o sustituibles con la finalidad de modificar la velocidad lineal de la unidad del accionador de mecanismo de tornillo sin fin por el procedimiento de variar la relación de transmisión de entrada total en respuesta a las variables exigencias en materia de la velocidad angular de elevación.
14. El sistema de la reivindicación 1, en donde a dicha unidad de procesamiento le son introducidos datos de una pluralidad de sensores de a bordo y externos con la finalidad de procesar los datos introducidos por medio de algoritmos almacenados, pudiendo dichos algoritmos ser adaptados al específico funcionamiento de distintos aparatos direccionales.
15. El sistema de la reivindicación 14, donde a un algoritmo de control de circuito cerrado le es introducido un error espacial medido del seguimiento del objetivo, y dicho algoritmo puede usar análisis proporciona, integral y diferencial, o bien cualquier combinación de los mismos, de las mediciones de error espacial nuevas y almacenadas para enviar una optimizada orden de control a los motores de accionamiento para acimut y elevación con la finalidad de minimizar rápidamente el error de seguimiento.
16. El sistema de la reivindicación 14, donde a un algoritmo de control le son específicamente introducidos datos de las condiciones atmosféricas ambientes, enviando dicho algoritmo órdenes de protección para resguardar el sistema a la unidad de seguimiento si se sobrepasasen las condiciones de funcionamiento del sistema.
17. El sistema de la reivindicación 14, en donde dicha unidad de procesamiento en combinación con los algoritmos de control almacenados envía órdenes e información a los de una pluralidad de sistemas auxiliares que comprenden bombas, ventiladores, enfriadores, dispositivos antihielo, elementos calentadores, luces, cámaras, sistemas de aviso, dispositivos de almacenamiento y procesamiento de datos de ordenador o una combinación de los mismos.
18. El sistema de la reivindicación 1, en donde dicho dispositivo de seguimiento opera ya sea como una única unidad o bien como parte de una pluralidad de seguidores agrupados en una agrupación, siendo dicha agrupación de seguidores en general supervisada y controlada por una unidad de procesamiento local que cuenta con una conexión por cable, inalámbrica o por medio de la red Internet o por una combinación de dichos sistemas a cada seguidor.
19. El sistema de la reivindicación 18 en donde las agrupaciones de seguidores pueden estar globalmente dispersadas y cada unidad de procesamiento local de una agrupación está puesta en red con una unidad central de proceso, siendo dicha conexión en red ya sea por cable o bien inalámbrica o bien por Internet o bien por una combinación de dichos sistemas.
20. El sistema de la reivindicación 19, en donde dicha unidad central de proceso es controlada por una estación de mando local o remota, pudiendo dicha estación de mando estar servida por operadores humanos o bien ser autónoma y comunicándose dicha estación de mando con la unidad central de proceso ya sea por cable o bien de manera inalámbrica o bien por Internet o bien mediante una combinación de dichos sistemas.
Patentes similares o relacionadas:
SISTEMA CONDENSADOR DE ENERGÍA SOLAR, CON LENTE LIQUIDA DEL TIPO CILÍNDRICA Y ABSORBENTE TIPO "CUERPO NEGRO", del 14 de Diciembre de 2017, de SANTANDER Y SANTANA, S.L: Un sistema condensador de energía solar formado por uno o varios equipos colectores destinados a la captación y absorción de la luz solar,previamente concentrada por refracción, […]
GENERADOR DE ENERGÍA TERMOSOLAR, del 27 de Octubre de 2017, de CALDERON RODRIGUEZ, MIGUEL: Generador de energía termosolar, que comprende dos discos parabólicos con espejos en una de sus caras que se disponen en una estructura de soporte […]
CONCENTRADOR DE SEGUIMIENTO SOLAR LINEAL A PUNTUAL Y MÉTODO, del 5 de Octubre de 2017, de INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY: Un concentrador de seguimiento solar linear a puntual (LTSC) que comprende un espejo PTC y un FL de dos secciones, ambos montados en un rastreador […]
Montaje de un receptor en un concentrador de energía solar, del 16 de Agosto de 2017, de Absolicon Solar Collector AB: Sistema de energía solar que comprende componentes ópticos de enfoque lineal y al menos un receptor, caracterizado porque comprende un dispositivo para ensamblar y […]
Sistema de conexión para una central termosolar, del 26 de Julio de 2017, de Senior Flexonics GmbH: Sistema de conexión para una central termosolar con un tubo conductor que puede pivotar alrededor de un eje de giro y que se encuentra rellenado con un fluido portador, […]
Seguidor de fuente luminosa, del 10 de Mayo de 2017, de MOSER, MARK K: Aparato para seguir una fuente luminosa (S), que comprende: una columna de soporte ; una plataforma montada de forma giratoria […]
Especificación de un dispositivo de soporte para paneles fotovoltaicos en sistemas de seguimiento fotovoltaico, del 12 de Abril de 2017, de Convert Tech S.r.l: Un dispositivo de soporte para paneles fotovoltaicos en sistemas de seguimiento fotovoltaico que comprende: · al menos un montante […]
MÉTODO DE CALIBRACIÓN PARA HELIOSTATOS, del 6 de Abril de 2017, de FUNDACION CENER-CIEMAT: Método de calibración para heliostatos que comprende llevar a cabo al menos una búsqueda para visualizar al menos una referencia por medio de un dispositivo de visión […]