RVDT de canal múltiple con trayectoria de carga dual y mecanismo de prevención de fallos.
Una disposición de sensor de desplazamiento angular, que comprende:
un engranaje primario (60) acoplado a un eje de entrada (20);
una pluralidad de engranajes secundarios (65) dispuestos alrededor y acoplados al engranaje primario; y
una pluralidad de sensores de desplazamiento angular (50);
caracterizado por que los sensores de desplazamiento angular (50) están acoplados integralmente con los engranajes secundarios (65);
en donde cada engranaje secundario (65) está acoplado a través de un acoplamiento (66) correspondiente a un eje (50a) correspondiente de uno de los sensores de desplazamiento angular (50) de manera que el acoplamiento (66) se romperá en caso de un atasco, de modo que los sensores de desplazamiento angular (50) restantes puedan continuar detectando si uno de los engranajes secundarios se retira del eje (50a) correspondiente.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/060975.
Solicitante: KAVLICO CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 14501 PRINCETON AVE. MOORPARK CA 93021 ESTADOS UNIDOS DE AMERICA.
Inventor/es: YAZDANI,SAEED.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B7/30 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 7/00 Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos. › para la medida de ángulos o conicidades; para ensayar la alineación de ejes.
- H01F21/06 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01F IMANES; INDUCTANCIAS; TRANSFORMADORES; EMPLEO DE MATERIALES ESPECIFICOS POR SUS PROPIEDADES MAGNETICAS. › H01F 21/00 Inductancias variables o transformadores variables del tipo señal (H01F 36/00 tiene prioridad). › por desplazamiento del núcleo o parte del núcleo respecto al arrollamiento o a los arrollamientos en el conjunto.
PDF original: ES-2529459_T3.pdf
Fragmento de la descripción:
RVDT de canal múltiple con trayectoria de carga dual y mecanismo de prevención de fallos Antecedentes
La presente invención se refiere en general a dispositivos de medición, y más particularmente, a un sensor de desplazamiento angular que tiene múltiples canales.
Tales sensores de desplazamiento angular se han desvelado en los documentos DE1985596 y W24/48899.
En los sensores de desplazamiento angular de la técnica anterior que usan tecnología de transformador diferencial variable rotatorio ("RVDT"), cuando el eje principal se rompe, el RVDT empieza a rotar sobre sí mismo. Además, si cada canal de RVDT se atasca, o el eje principal se atasca, todo el mecanismo se atasca. Sería ventajoso evitar estos problemas, y proporcionar un mecanismo de puesta a cero y una trayectoria de carga alternativa en el caso de que aparezcan tales problemas.
De acuerdo con la presente invención se proporciona una disposición de sensor de desplazamiento angular, que comprende un engranaje primario acoplado a un eje de entrada: una pluralidad de engranajes secundarios dispuestos alrededor y acoplados al engranaje primario; y una pluralidad de sensores de desplazamiento angular; caracterizados por que los sensores de desplazamiento angular están acoplados integralmente con los engranajes secundarios; en el que cada engranaje secundario está acoplado a un eje correspondiente de uno de los sensores de desplazamiento angular de manera que se romperá un acoplamiento en caso de un atasco, de modo que los restantes sensores de desplazamiento angular pueden continuar detectando si uno de los engranajes secundarios se rompe del eje correspondiente.
Breve descripción de los dibujos
La invención puede entenderse más fácilmente haciendo referencia a los dibujos adjuntos en los que:
La Figura 1 es una vista en perspectiva de la realización preferida de un sensor de desplazamiento angular de acuerdo con la invención con una porción del sensor presentada como transparente.
La Figura 2 es una vista en perspectiva de una porción del sensor de la Figura 1.
La Figura 3A es una vista de planta inferior de una porción del sensor de la Figura 1, y la Figura 3B es una vista
en planta lateral de la misma porción.
La Figura 4 es una vista en perspectiva superior de una porción del sensor de la Figura 1 que muestra la disposición del engranaje primario y los engranajes secundarios.
La Figura 5 es una vista en perspectiva lateral de una porción del sensor de la Figura 1 que muestra el engranaje
secundario soldado al RVDT.
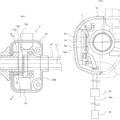
La Figura 6 es una vista en perspectiva lateral que muestra el eje principal montado en el alojamiento principal.
La Figura 7 es una vista en perspectiva lateral del eje principal.
La Figura 8 es una vista en perspectiva del sensor de la Figura 1 con cubiertas protectoras frontal y trasera en su
lugar.
Los números similares hacen referencia a partes similares a lo largo de todas las diversas vistas de los dibujos. Descripción detallada de la realización preferida
La presente divulgación se refiere a mejoras en sensores de fuerza y desplazamiento, como se ejemplifica mediante una realización usando la tecnología de transformador diferencial variable rotatorio ("RVDT"). En los términos más generales, la realización preferida de un sensor como se describe en el presente documento está contenida en un envase que incluye un alojamiento principal con un acoplamiento para un eje de entrada que está a su vez acoplado a una carga de interés, por ejemplo, controles de vuelo de aviones. El eje de entrada está soportado en el
alojamiento principal mediante cojinetes de precisión, y ventajosamente, el eje incluye una muesca de cizalla cerca
del acoplamiento de estría de entrada. En el extremo trasero del alojamiento, el eje de entrada está acoplado a un engranaje principal, que a su vez está acoplado a una pluralidad de engranajes secundarios, que cada uno está montado en la parte trasera del alojamiento, y que incluye sensores de RVDT acoplados a los engranajes secundarios para detectar desplazamiento angular.
En la realización preferida descrita a continuación, debería reconocerse que las dimensiones y tolerancias indicadas son aproximadas, y que los materiales y dimensiones se sugieren para la realización preferida. Pueden contemplarse también otras realizaciones usando diferentes materiales, diferentes dimensiones y diferentes tolerancias, dependiendo de la aplicación. Tales cambios se considera que están dentro del alcance de la invención. La siguiente descripción es ilustrativa únicamente y no pretende ser limitante.
La Figura 1 ilustra la realización preferida de un envase de sensor 1 destinado al uso, por ejemplo, con controles de vuelo de aeronaves. Un eje de entrada 2 se recibe en el alojamiento principal 3, con una cubierta de alojamiento
(mostrada como transparente) montada sobre la parte trasera del alojamiento principal. El alojamiento 3 y la cubierta 4 proporcionan contención y una estructura de soporte para montar y acoplar una serie de engranajes y sensores al eje de entrada, como se describe a continuación. Ventajosamente, un engranaje primario está acoplado al eje de entrada, una pluralidad de engranajes secundarios están acoplados al engranaje primario, y los sensores de desplazamiento angular están acoplados integralmente con los engranajes secundarios.
Como puede observarse en las Figuras 1 y 2, el alojamiento principal 3 incluye una placa 31 de cubierta, una primera porción cilindrica 32, una segunda porción cilindrica 33, un reborde 34 y un alojamiento de eje 35. Preferentemente, el alojamiento principal 3 está mecanizado a partir de una única pieza de acero inoxidable de calidad de aviación, tal como calidad 34L pero las piezas podrían mecanizarse individualmente y soldarse de manera blanda o fuerte según sea necesario. El reborde 34 tiene un diámetro exterior de 1,15 centímetros (cm) (4, pulgadas), un diámetro interior de 6,985 cm (2,76 pulgadas) y un espesor de ,478 cm (,188 pulgadas). Se proporciona una serie de aberturas 34a alargadas en el reborde de modo que los sensores 1 puedan fijarse de manera rígida usando sujetadores convencionales en su lugar con los controles de vuelo (no mostrados).
La segunda porción cilindrica 33 tiene un diámetro exterior de 7,874 cm (3,1 pulgadas), un diámetro interior de 6,858 cm (2,7 pulgadas) y un espesor de 5,8 cm (2, pulgadas). Se proporciona una serie de aberturas 33a en el lado de la segunda porción cilindrica 33 para cables de tendido 38 (véase Figura 8) desde el interior del alojamiento 3.
La primera porción cilindrica 32 tiene un diámetro exterior de 7,569 cm (2,98 pulgadas), un diámetro interior de 6,858 cm (2,7 pulgadas) y un espesor de ,635 cm (,25 pulgadas). La diferencia en los diámetros exteriores de la primera y segunda porciones cilindricas crea una región 35 anular para recibir la cubierta 4. Un rebaje 36 que mide ,152 cm (,6 pulgadas) de ancho por ,127 cm (,5 pulgadas) de profundidad está mecanizado en la superficie exterior de la primera porción cilindrica 32, y una junta 36 convencional se ajusta en el rebaje para proporcionar un sellado entre la cubierta 4 y la base 3.
La cubierta 4 está mecanizada de manera similar a partir de acero inoxidable de calidad de aviación, como una única pieza integral, o como piezas individuales, con una porción cilindrica 41 y una porción superior 42. Una serie de columnas espaciadoras 43 se ajustan entre la porción superior 42 de la cubierta y la placa de la cubierta del alojamiento principal 31, y se usan sujetadores 44 convencionales, tales como un perno y una tuerca roscados, para asegurar estas porciones juntas, y se usan arandelas 45 como un sello entre los sujetadores y la cubierta.
Con referencia de nuevo a la Figura 2, se proporcionan las aberturas 37 que tienen un diámetro de 1,588 (,625 pulgadas) en la placa de la cubierta del alojamiento 31 para recibir las unidades 5 de RVDT. Como se muestra en las Figuras 3a y 3b, cada una de las unidades 5 de RVDT está montada a la placa de la cubierta del alojamiento principal 31 dentro del alojamiento principal mediante sujetadores convencionales, por ejemplo, dos tornillos 51 con arandelas 52, con el eje 5a del RVDT que se extiende a lo largo del alojamiento. También, el eje principal 2 se extiende a lo largo del alojamiento.
Como se muestra en la Figura 4, un engranaje principal 6 sólido está acoplado al eje principal 2, por ejemplo mediante soldadura. El engranaje principal 6 mide 2,433 cm (,958 pulgadas) de diámetro con 9 dientes proporcionados a un paso diametral de 96, y está fabricado de acero inoxidable. Montado en la parte superior del engranaje 6 está una placa nula... [Seguir leyendo]
Reivindicaciones:
1. Una disposición de sensor de desplazamiento angular, que comprende:
un engranaje primario (6) acoplado a un eje de entrada (2);
una pluralidad de engranajes secundarios (65) dispuestos alrededor y acoplados al engranaje primario;
y
una pluralidad de sensores de desplazamiento angular (5);
caracterizado por que los sensores de desplazamiento angular (5) están acoplados integralmente con los engranajes secundarios (65);
en donde cada engranaje secundario (65) está acoplado a través de un acoplamiento (66) correspondiente a un eje (5a) correspondiente de uno de los sensores de desplazamiento angular (5) de manera que el acoplamiento (66) se romperá en caso de un atasco, de modo que los sensores de desplazamiento angular (5) restantes puedan continuar detectando si uno de los engranajes secundarios se retira del eje (5a) correspondiente.
2. Una disposición de sensor como en la reivindicación 1, que comprende adicionalmente una muesca de cizalla (24) formada en el eje de entrada (2).
3. Una disposición de sensor como en la reivindicación 1, en el que el eje de entrada (2) está adaptado para tener un extremo del mismo acoplado a una carga de interés.
4. Una disposición de sensor como en la reivindicación 3, que comprende adicionalmente una muesca de cizalla formada en el eje de entrada.
5. Una disposición de sensor como en la reivindicación 1, que comprende adicionalmente:
un alojamiento cilindrico princiapl (3),
un alojamiento de eje (35) formado coaxialmente dentro del alojamiento principal, y
una placa de cubierta (4) que encierra un extremo del alojamiento principal y que tiene una abertura central y una pluralidad de aberturas secundarias distribuidas alrededor de las aberturas centrales, en donde el alojamiento del eje está fijado próximo a la abertura central y el eje de entrada se extiende a través de la abertura central,
en donde el engranaje primario (6) está fijado al eje de entrada (2) fuera del alojamiento principal (3), en donde la pluralidad de sensores de desplazamiento (5) están fijados en aberturas secundarias correspondientes con los ejes de sensor (5a) que se extienden a través de las aberturas secundarias, en donde los engranajes secundarios (65) están fijados a los ejes de sensor (5a) correspondientes fuera del alojamiento principal (3).
6. Una disposición de sensor como en la reivindicación 5, en el que cada engranaje secundario (65) está fijado a su eje de sensor (5a) correspondiente mediante una soldadura por láser de penetración controlada.
7. Una disposición de sensor como en la reivindicación 5, que comprende adicionalmente un mecanismo de puesta a cero (61,62, 61a, 61b, 64a, 64b) acoplado al engranaje principal (6).
8. Una disposición de sensor como en la reivindicación 1, en el que el alojamiento de eje (35) incluye cojinetes (22) que soportan el eje de entrada (2).
9. Una disposición de sensor como en la reivindicación 7, en el que el mecanismo de puesta a cero comprende:
una placa nula (61) montada en el engranaje primario (6);
un primer poste (64a) y un segundo poste (64b) cada uno fijado al alojamiento cilindrico princiapl (3); y un resorte de torsión (62) con un primer extremo situado en el primer poste y un segundo extremo situado en el segundo poste,
en donde la placa nula (61) incluye un rebaje lateral (61a) y un orificio (61 b),
en donde el primer poste está situado en el orificio y el segundo poste está situado en el rebaje lateral, y en donde cada sensor de desplazamiento (5) vuelve a una posición nula si el eje de entrada (2) se desacopla del engranaje primario (6).
Patentes similares o relacionadas:
 Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
SISTEMA SENSOR DE POSICION, del 22 de Enero de 2020, de PIHER SENSORS & CONTROLS, S.A: 1. Sistema sensor de posición de tipo inductivo para motores, comprendiendo el sistema sensor un sensor que comprende una bobina inductora y una bobina pasiva, […]
Aparato de detección de la posición del polo magnético para máquinas síncronas, del 3 de Abril de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un aparato de detección de la posición del polo magnético para máquinas síncronas, que comprende: - un medio de circuito , para convertir […]
Dispositivo de detección de ángulo de rotación absoluto de múltiples vueltas y método para la detección de ángulo de rotación absoluto, del 31 de Mayo de 2017, de Oriental Motor Co., Ltd: Un aparato de detección de ángulo de rotación de múltiples vueltas que comprende: un engranaje de árbol motor (10b) montado sobre un árbol motor (10a); un primer […]
Dispositivo para detectar ángulos de rotación absolutos de rotación múltiple y método para detectar su ángulo de rotación, del 8 de Marzo de 2017, de Oriental Motor Co., Ltd: Un dispositivo de detección de ángulo de rotación para detectar un ángulo de rotación absoluto de un primer árbol giratorio , que comprende: […]
Dispositivo para detectar ángulos de rotación absolutos de rotación múltiple, y método para detectar los mismos, del 19 de Octubre de 2016, de Oriental Motor Co., Ltd: Un dispositivo para calcular un ángulo de rotación absoluto de rotación múltiple, que comprende: un mecanismo de transmisión adaptado para transmitir una revolución […]
Dispositivo para detectar el ángulo de rotación de un eje de dirección, del 10 de Agosto de 2016, de KAYABA INDUSTRY CO., LTD.: Dispositivo de deteccion del angulo de rotacion del eje de direccion que detecta un angulo de rotacion de un eje de direccion que gira al accionar […]
 Captador de posición absoluto y multi-periódico, del 1 de Febrero de 2016, de Moving Magnet Technologies (MMT): Captador magnético de posición (A), que incluye al menos una unidad imantada , una primera sonda magnetosensible y una segunda sonda […]
Captador de posición absoluto y multi-periódico, del 1 de Febrero de 2016, de Moving Magnet Technologies (MMT): Captador magnético de posición (A), que incluye al menos una unidad imantada , una primera sonda magnetosensible y una segunda sonda […]