RUEDA OMNIDIRECCIONAL Y MÓVIL OMNIDIRECCIONAL.
Rueda omnidireccional y móvil omnidireccional.
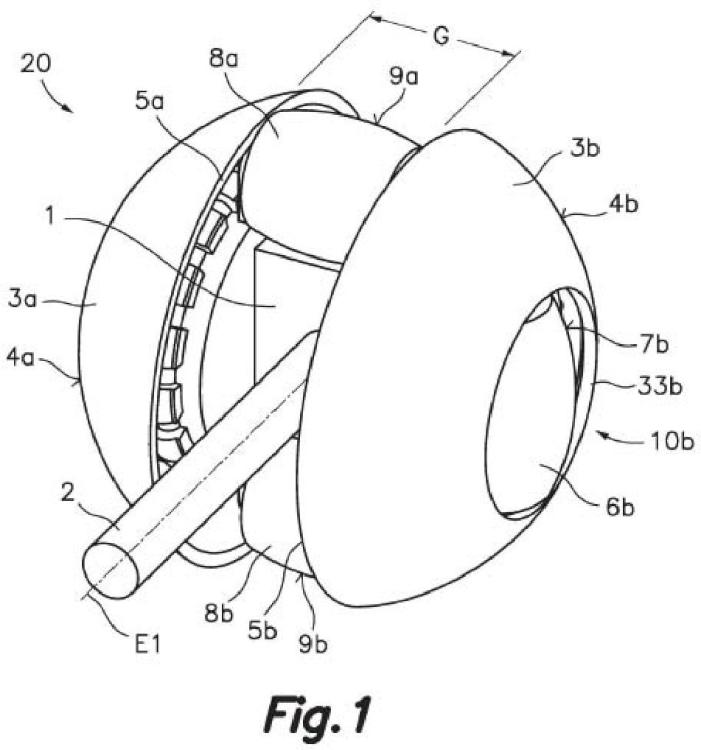
La rueda omnidireccional (20) comprende un cuerpo de soporte (1) fijado a un árbol motor (2) coaxial con un eje de giro de rueda (E1),
dos cuerpos de rodadura (3a, 3b) conectados giratoriamente al cuerpo de soporte (1) respecto a un eje de giro libre (E2) perpendicular al eje de giro de rueda (E1), los cuales tienen unas superficies de rodadura semiesféricas (4a, 4b), unas regiones polares truncadas (10a, 10b) donde están instalados dos rodillos polares (6a, 6b), y unos bordes circunferenciales (5a, 5b) separados por un espacio circunferencial intermedio (G) a través del cual pasa el árbol motor (2) y donde están instalados dos rodillos intermedios (8a, 8b). Los rodillos polares e intermedios tienen respectivos ejes en un plano perpendicular al eje de giro de rueda y superficies de rodadura cuyas directrices tienen el mismo radio (R) y el mismo centro (C) que las superficies de rodadura semiesféricas.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430197.
Solicitante: UNIVERSITAT POLITECNICA DE CATALUNYA.
Nacionalidad solicitante: España.
Inventor/es: MARTINEZ MIRALLES,JORDI, CLOS COSTA,Daniel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60B19/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60B RUEDAS DE VEHICULOS (fabricación de ruedas o de sus partes por laminado B21H 1/00, por forjado, martillado o prensado B21K 1/28 ); RUEDAS PEQUEÑAS PIVOTANTES; EJES PARA RUEDAS; MEJORA EN LA ADHERENCIA DE RUEDAS. › B60B 19/00 Ruedas no previstas en otro lugar o que tienen características precisadas en uno de los subgrupos del presente grupo. › Ruedas en forma de esferas (B60B 19/06 tiene prioridad).
Fragmento de la descripción:
Campo de la técnica
La presente invención concierne a una rueda omnidireccional, la cual es útil como rueda motriz para un móvil omnidireccional, entendiéndose como móvil omnidireccional un cuerpo capaz de moverse en cualquier dirección en relación con una superficie de soporte, ya sea plana o tridimensional. La presente invención también concierne a un móvil omnidireccional que hace uso de tal rueda omnidireccional.
Antecedentes de la invención
El documento JP 2007210576 A, de Tadakuma, da a conocer una rueda omnidireccional que comprende un cuerpo de soporte fijado a un árbol motor que puede ser accionado para girar junto con dicho cuerpo de soporte alrededor de un eje de giro de rueda, y dos cuerpos de rodadura conectados al cuerpo de soporte de manera que pueden girar libre e independientemente alrededor de un eje de giro libre común, perpendicular a dicho eje de giro de rueda. Los mencionados dos cuerpos de rodadura tienen unas respectivas superficies de rodadura semiesféricas que rodean parcialmente el cuerpo de soporte y que tienen un radio de curvatura constante común y un centro geométrico común situado en una intersección de dicho eje de giro libre con el eje de giro de rueda. Los dos cuerpos de rodadura tienen además unos respectivos bordes circunferenciales opuestos separados por un espacio circunferencial a través del cual está instalado dicho árbol motor.
Pare evitar la imposibilidad de girar que tendría cualquiera de dichos dos cuerpos de rodadura cuando su superficie de rodadura semiesférica estuviera en contacto con una superficie de soporte en un punto correspondiente a su polo, es decir, con el mencionado eje de giro libre dispuesto en una posición perpendicular a un plano tangente a dicha superficie de soporte en el punto de contacto, y la rueda fuera empujada en cualquier dirección paralela a dicho plano tangente, el citado documento JP 2007210576 A propone una realización en la que los dos cuerpos de rodadura tienen unas respectivas regiones polares truncadas en las que están instalados dos respectivos rodillos polares conectados al cuerpo de soporte de manera que pueden girar libre e independientemente alrededor de respectivos ejes de giro polares perpendiculares al eje de giro libre y comprendidos en un plano medio perpendicular al eje de giro de rueda y que también comprende dicho centro
geométrico. Los mencionados dos rodillos polares tienen unas respectivas superficies en forma de tonel, cada una de las cuales tiene una generatriz en forma de arco que tiene el radio de curvatura común y el mismo centro geométrico que las superficies de rodadura semiesféricas.
No obstante, en esta realización del citado documento JP 2007210576 A aún persiste un inconveniente relacionado con una falta de continuidad en las superficies de rodadura semiesféricas en el mencionado espacio circunferencial entre los bordes circunferenciales opuestos de los respectivos cuerpos de rodadura, el cual es necesario para permitir el paso del árbol motor, puesto que esta falta de continuidad produce irregularidades indeseadas en la rodadura cuando la rueda gira alrededor del eje de giro de rueda.
Este mismo documento JP 2007210576 A propone una solución al mencionado inconveniente de falta de continuidad en las superficies de rodadura semiesféricas aportando otra realización en la que el árbol motor se conecta al cuerpo de soporte mediante una horquilla provista de dos brazos planos y delgados instalados a través del espacio circunferencial en posiciones adyacentes a los bordes circunferenciales opuestos de los respectivos cuerpos de rodadura, y en la que un tercer cuerpo de rodadura está instalado entre los dos brazos de la horquilla y conectado al cuerpo de soporte de manera que pueden girar alrededor del eje de giro libre, teniendo dicho tercer cuerpo de rodadura una superficie de rodadura esférica que tiene el mismo radio de curvatura y el mismo centro geométrico que las superficies de rodadura semiesféricas.
Sin embargo, en esta otra realización del citado documento JP 2007210576 A los brazos de la horquilla, aunque sean delgados, tendrán un grosor que hará necesaria la provisión de espacios circunferenciales entre los bordes circunferenciales opuestos de los tres respectivos cuerpos de rodadura y esto seguirá ocasionando una discontinuidad en las superficies de rodadura esféricas. Además, los mencionados espacios circunferenciales no permiten la instalación de un brazo de soporte independiente del árbol motor para soportar giratoriamente el cuerpo de soporte a una estructura de un móvil omnidireccional o a una estructura que soporta a un móvil omnidireccional.
Exposición de la invención
A lo largo de esta descripción, los términos "esférico" y "semiesférico" se usan para designar superficies que tienen todos sus puntos equidistantes de un centro aunque no conformen una esfera o una semiesfera completa.
De acuerdo con un primer aspecto, la presente invención contribuye a solventar los anteriores y otros inconvenientes aportando una rueda omnidireccional que comprende en esencia un cuerpo de soporte, dos cuerpos de rodadura, dos rodillos polares y dos rodillos intermedios.
El mencionado cuerpo de soporte está configurado en relación con un eje de giro de rueda, y está provisto de unos medios de fijación para fijar el cuerpo de rueda a un árbol motor coaxial con dicho eje de giro de rueda. El árbol motor puede ser accionado giratoriamente por un motor para hacer girar el cuerpo de soporte alrededor del eje de giro de rueda.
Los mencionados dos cuerpos de rodadura están conectados al cuerpo de soporte de manera que pueden girar libre e independientemente respecto al cuerpo de soporte alrededor de un eje de giro libre común perpendicular a dicho eje de giro de rueda que tiene una intersección con el eje de giro de rueda. Dichos dos cuerpos de rodadura tienen unas respectivas superficies de rodadura semiesféricas que rodean parcialmente el cuerpo de soporte. Estas superficies semiesféricas tienen un radio de curvatura común constante y un centro geométrico común situado en dicha intersección entre el eje de giro libre y el eje de giro de rueda. Los dos cuerpos de rodadura tienen además unas respectivas regiones polares truncadas y unos respectivos bordes circunferenciales separados por un espacio circunferencial intermedio a través del cual está instalado dicho árbol motor.
Los dos mencionados rodillos polares están instalados en dichas regiones polares truncadas de los respectivos cuerpos de rodadura y están conectados al cuerpo de soporte de manera que pueden girar libre e independientemente alrededor de respectivos ejes de giro polares perpendiculares al eje de giro libre y situados en un plano medio perpendicular al eje de giro de rueda que también comprende el centro geométrico común. Cada uno de dichos rodillos polares tiene una superficie en forma de tonel que en su intersección con dicho plano medio define una generatriz en forma de arco que tiene dicho radio de curvatura común y dicho centro geométrico común.
Los dos mencionados rodillos intermedios están instalados en dicho espacio circunferencial intermedio en posiciones opuestas respecto al centro geométrico común y conectados al cuerpo de soporte de manera que pueden girar libre e independientemente alrededor de respectivos ejes de giro intermedios perpendiculares a los ejes de giro polares y comprendidos en dicho plano medio perpendicular al eje de giro de rueda. Cada uno de dichos rodillos intermedios tiene una superficie en forma de tonel que en su intersección con dicho plano medio define una generatriz en forma de arco que tiene dicho radio de curvatura común y dicho centro geométrico común.
Con esta disposición, la rueda presenta una virtual continuidad en las superficies de rodadura cuando gira sobre una superficie de soporte alrededor del eje de giro de rueda y cuando es empujada en cualquier dirección sobre dicha superficie de soporte.
Además, la disposición de los rodillos intermedios permite proveer un espacio circunferencial intermedio suficientemente ancho para instalar a través del mismo un elemento estructural de conexión conectado al cuerpo de soporte de manera que puede girar libremente respecto al cuerpo de soporte alrededor del eje de giro de rueda, estando dicho elemento estructural de conexión fijado a una estructura de un móvil omnidireccional o a una estructura que soporta a dicho móvil omnidireccional.
Así, las cargas soportadas sobre el móvil omnidireccional son transmitidas desde la estructura al cuerpo de soporte de la rueda o desde el cuerpo de soporte de la rueda a la estructura por el mencionado elemento estructural de conexión, y el árbol motriz queda liberado de la transmisión de cargas.
...
Reivindicaciones:
1.- Rueda omnidireccional, comprendiendo:
un cuerpo de soporte (1) configurado en relación con un eje de giro de rueda (E1), teniendo dicho cuerpo de soporte (1) unos medios de fijación para fijar un árbol motor (2) coaxial con dicho eje de giro de rueda (E1);
dos cuerpos de rodadura (3a, 3b) conectados al cuerpo de soporte (1) de manera que pueden girar libre e independientemente alrededor de un eje de giro libre (E2) común, perpendicular a dicho eje de giro de rueda (E1), teniendo dichos dos cuerpos de rodadura (3a, 3b) unas respectivas superficies de rodadura semiesféricas (4a, 4b) que rodean parcialmente el cuerpo de soporte (1) y unos respectivos bordes circunferenciales (5a, 5b) separados por un espacio circunferencial intermedio (G) a través del cual se instala dicho árbol motor (2), y teniendo dichas superficies semiesféricas (4a, 4b) un radio de curvatura común (R) constante y un centro geométrico común (C) situado en una intersección de dicho eje de giro libre (E2) con el eje de giro de rueda (E1); y
dos rodillos polares (6a, 6b) instalados en unas respectivas regiones polares truncadas (10a, 10b) de los cuerpos de rodadura (3a, 3b) y conectados al cuerpo de soporte (1) de manera que pueden girar libre e independientemente alrededor de respectivos ejes de giro polares (E3a, E3b) perpendiculares al eje de giro libre (E2) y comprendidos en un plano medio (P) perpendicular al eje de giro de rueda (E1) que también comprende dicho centro geométrico común (C), teniendo dichos rodillos polares (6a, 6b) unas respectivas superficies de rodadura en forma de tonel (7a, 7b) que en su intersección con dicho plano medio (P) definen unas respectivas generatrices en forma de arco que tienen dicho radio de curvatura común (R) y el centro geométrico común (C),
caracterizada por que comprende además:
dos rodillos intermedios (8a, 8b) instalados en posiciones opuestas en dicho espacio circunferencial intermedio (G) y conectados al cuerpo de soporte (1) de manera que pueden girar libre e independientemente alrededor de respectivos ejes de giro intermedios (E4a, E4b) perpendiculares a los ejes de giro polares (E3a, E3b) y comprendidos en dicho plano medio (P), teniendo dichos rodillos intermedios (8a, 8b) unas respectivas superficies de rodadura en forma de tonel (9a, 9b) que en su intersección con el plano medio (P) definen unas respectivas generatrices en forma de arco que tienen el radio de curvatura común (R) y el centro geométrico común (C).
2.- Rueda omnidireccional según la reivindicación 1, caracterizada por que un elemento estructural de conexión (11) está conectado al cuerpo de soporte (1) de manera que puede girar libremente respecto al cuerpo de soporte (1) alrededor del eje giro de rueda (E1), estando dicho elemento estructural de conexión (11) instalado a través del espacio
circunferencial intermedio (G) y fijado a una estructura (17).
3.- Móvil omnidireccional, comprendiendo una estructura en la que están instaladas al menos tres ruedas omnidireccionales y al menos tres motores eléctricos (13, 18) controlados independientemente, estado cada uno de dichos motores eléctricos (13, 18) conectado mecánicamente para accionar giratoriamente una de dichas ruedas omnidireccionales,
caracterizado por que al menos una de las ruedas omnidireccionales es una rueda omnidireccional (20) de acuerdo con la reivindicación 1 o 2, y al menos uno de dichos motores eléctricos (13, 18) está conectado mecánicamente para accionar giratoriamente un árbol motor (2) fijado al cuerpo de soporte (1) de dicha rueda omnidireccional (20) de acuerdo con la reivindicación 1 o 2.
4.- Móvil omnidireccional según la reivindicación 3, caracterizado por que dicha estructura es
una estructura estacionaria (17), y el móvil omnidireccional comprende además una plataforma móvil (15) provista de una superficie inferior (16) apoyada por gravedad sobre dichas ruedas omnidireccionales (20).
5.- Móvil omnidireccional según la reivindicación 3, caracterizado por que dicha estructura es
una estructura móvil (12) y dichas ruedas omnidireccionales (20) están dispuestas para rodar sobre una superficie de soporte.
Patentes similares o relacionadas:
RUEDA ABATIBLE PARA MOBILIARIO, del 6 de Octubre de 2017, de ALMEIDA LOPEZ, Luis: 1. Rueda abatible para mobiliario, caracterizada porque comprende una carcasa alargada con unos salientes en su exterior, la cual contiene un muelle […]
Rueda esférica y vehículo que implementa la rueda, del 4 de Octubre de 2017, de Aldebaran Robotics: Rueda esférica destinada a mover un vehículo , estando la rueda motorizada en rotación por un árbol que puede girar alrededor de un eje , caracterizada […]
 RUEDA OMNIDIRECCIONAL, Y MÓVIL OMNIDIRECCIONAL, del 20 de Agosto de 2015, de UNIVERSITAT POLITECNICA DE CATALUNYA: La rueda omnidireccional comprende un cuerpo de soporte fijado a un árbol motor coaxial con un eje de giro de rueda (E1), dos cuerpos de rodadura (3a, 3b) […]
RUEDA OMNIDIRECCIONAL, Y MÓVIL OMNIDIRECCIONAL, del 20 de Agosto de 2015, de UNIVERSITAT POLITECNICA DE CATALUNYA: La rueda omnidireccional comprende un cuerpo de soporte fijado a un árbol motor coaxial con un eje de giro de rueda (E1), dos cuerpos de rodadura (3a, 3b) […]