ROBOT PARALELO.
Un mecanismo para posicionar y orientar un objeto en el espacio con al menos tres grados de libertad,
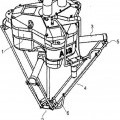
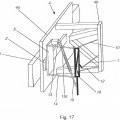
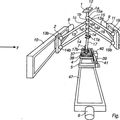
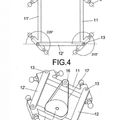
el mecanismo comprende: una base (1); un brazo principal (2; 10, 5, 80, 14) el mencionado brazo principal comprende una plataforma (19) montada rotativamente en la mencionada base y que se permite que rote sobre un eje central (A) y un componente final (80) para sostener el mencionado objeto; y un primer y un segundo brazos de apoyo (3, 4), cada uno de los mencionados primer y segundo brazos de apoyo comprende un brazo actuador (30, 40) conectado rotativamente a la mencionada base, un actuador (32, 42) para rotar el mencionado brazo actuador en relación a la mencionada base sobre un primer y segundo eje de actuador respectivo (B, C) y un antebrazo (34, 44) conectado moviblemente al mencionado brazo actuador, caracterizado en que el mencionado brazo principal comprende además medios de articulación (5; 13, 16, 51, 55, 53; 13, 16, 51, 55, 57; 13, 16, 61, 65) interpuestos entre la mencionada plataforma y el mencionado componente final, los mencionados medios de articulación permiten al mencionado componente final dos grados de libertad traslacionales respecto a la mencionada plataforma y mantienen la inclinación del mencionado componente final respecto al mencionado eje central para todas las posiciones y orientaciones del mencionado componente final, y un actuador (14) para influir uno de los mencionados grados de libertad traslacionales del mencionado componente final, en donde los antebrazos del primer y segundo brazo de apoyo mencionado están conectados moviblemente al mencionado brazo principal, de tal forma que el mencionado primer y segundo brazo de apoyo influyen la posición y orientación del mencionado componente final, y en donde los mencionados medios de articulación (5) comprenden un brazo actuador (13) conectado rotativamente a la mencionada plataforma (10) y accionado por el actuador (14) del mencionado brazo principal en relación a la mencionada plataforma sobre un eje del actuador principal (D), un antebrazo (16) conectado moviblemente al mencionado brazo actuador (13) con al menos un grado de libertad rotacional sobre un eje del antebrazo (E), el mencionado antebrazo estando además conectado moviblemente al mencionado componente final (80) con al menos un grado de libertad rotacional sobre un eje final (F), y en donde el mencionado eje del actuador principal (D) es sustancialmente perpendicular al mencionado eje central (A) y sustancialmente paralelo al mencionado eje del antebrazo (E) y el mencionado eje final (F) para todas las posiciones y orientaciones del mencionado componente final (80)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/009316.
Solicitante: MERZ, MICHAEL.
Nacionalidad solicitante: Alemania.
Dirección: SIMON-DACH-STRASSE 9 10245 BERLIN ALEMANIA.
Inventor/es: ROY,SHAMBHU NATH, MERZ,MICHAEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 15 de Marzo de 2006.
Clasificación Internacional de Patentes:
- B25J17/02F2
- B25J19/00D4
- B25J9/10C
Clasificación PCT:
- B23Q1/54 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › con sólo dos pares de rotación.
- B25J17/02 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
- B25J18/00 B25J […] › Brazos.
- B25J9/10 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizado por los medios para regular la posición de los elementos del manipulador.
- B25J9/16 B25J 9/00 […] › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2363886_T3.pdf
Fragmento de la descripción:
ANTECEDENTES
La presente invención en general se refiere a un aparato con múltiples brazos accionados dispuestos en paralelo para posicionar y orientar un objeto en el espacio con al menos tres grados de libertad e inclinación mantenida.
Existe una necesidad de robots paralelos simples y efectivos, también conocidos como mecanismos de cinemática paralela. En general, los robots se usan en aplicaciones como manipulación, montaje, posicionamiento, recogida y colocación, embalaje, paletización, medición, mecanizado, etcétera. Los robots pueden ser clasificados como en serie o paralelos. Los robots en serie o mecanismos de cinemática en serie, son ampliamente usados y actualmente dominan el mercado.
Un robot en serie tiene una serie de vigas en voladizo que están conectadas juntas moviblemente y de una forma de extremo a extremo por uniones de revoluta o prismáticas accionadas, formando un circuito abierto. Cuando un robot en serie es sometido a carga, la posición del miembro más lejano, es decir, el efector final, está sujeto a las deflexiones acumulativas de todos los miembros en serie. Debido a que las fuerzas que accionan el miembro más lejano cusan una flexión no favorable y momentos de torsión en todos los miembros en serie y por lo tanto grandes deflexiones, el error de posicionamiento del efector final son significativas. Para mejorar la precisión y la dureza de un robot en serie, sus miembros están diseñados para ser rígidos. Sin embargo, esto también aumenta la masa en movimiento o inercia del mecanismo y causa un diseño voluminoso así como una relación pobre de dureza a masa y de carga útil a masa. Además, normalmente se requiere que los actuadores de un robot en serie estén montados cerca de las uniones a lo largo de la cadena en serie y aumentan más la masa en movimiento de la estructura. Como resultado, la capacidad de aceleración de los mecanismos en serie es limitada, causando un ciclo y tiempo de ajuste más largo en las aplicaciones robóticas.
Un mecanismo bien conocido del tipo en serie es el llamado robot SCARA, que incluye tres uniones de revoluta accionadas con ejes paralelos de rotación y una articulación prismática actuada. El dispositivo es capaz de posicionar y orientar un objeto en un espacio de trabajo cilíndrico con tres grados de libertad traslacionales (x, y, z) y un grado de libertad rotacional (rotación sobre z, es decir, la orientación) referida aquí como la movilidad SCARA. La inclinación del objeto, es decir, su rotación sobre los ejes x e y, permanece constante respecto a la base del robot para todas las posturas del mecanismo. La inclinación fijada hace este tipo de mecanismo adecuado para una amplia serie de aplicaciones industriales, como manipulación, recogida y colocación, embalaje o montaje. Otra característica del mecanismo es que los ejes de las uniones de revoluta accionadas están normalmente dispuestas en paralelo a la dirección de las fuerzas gravitatorias, de tal forma que el robot puede ser posicionado manualmente en el plano x-y por un operario, sin emplear ningún actuador o freno. Esto es útil cuando se le enseña al robot o se reajusta tras una colisión con el medioambiente. Siendo una estructura en serie, sin embargo, el robot SCARA sufre de una pobre relación de dureza a masa y de carga útil a masa, bajas frecuencias naturales y un rendimiento pobre de velocidad y aceleración. Por lo tanto, existe una necesidad de un robot, que permita que los objetos sean desplazados en el espacio con tres o cuatro grados de libertad e inclinación retenida, y que proporcione un rendimiento de aceleración alto en combinación con un diseño ligero, rígido y capacidad de posicionamiento precisa. También existe la necesidad de que ese robot permanezca estacionario bajo la influencia de la gravedad y por lo tanto permita el posicionamiento manual por un operario.
En relación a los robots en serie, los robots paralelos normalmente tienen una relación mejorada de dureza a masa y carga útil a masa, mejor precisión, superiores propiedades dinámicas y se pueden mover a mayores velocidades y aceleraciones. Un robot o mecanismo paralelo tiene una pluralidad de conexiones que forman uno o más circuitos cerrados, las conexiones por lo tanto comparten la carga en el efector final. Las conexiones de ese mecanismo normalmente experimentan mayormente compresión y fuerzas de tracción, permitiendo el uso de material más barato, más ligero, y más simple. Además los errores de posicionamiento de los actuadores son normalmente divididos, resultando por lo tanto en una alta precisión del efector final. Además los actuadores de los robots paralelos son a menudo montados en o cerca de la base, lo que reduce la masa en movimiento y permite altas aceleraciones del efector final. También facilita un diseño más fácil y una integración económica de los actuadores en el robot. Ejemplos de robots paralelos están ilustrados en las Patentes U.S. Nº 6.497.548, 6.602.042, 6.648.583, y la Solicitud de Patente U.S. 2004/0211284.
Mecanismos adicionales del tipo paralelo han sido presentados, por ejemplo, en las Patentes U.S. Nº
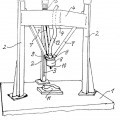
4.976.582 y 6.516.681. Ambos dispositivos proporcionan movilidad SCARA. Debido a la disposición rotacionalmente simétrica de ambos dispositivos, el espacio de trabajo es relativamente pequeño. Además, como resultado de la suspensión requerida de un entramado, los dispositivos necesitan significativamente más espacio de suelo en comparación con los mecanismos tradicionales como los robots SCARA, llevando a una relación pobre de espacio de trabajo a superficie ocupada. El montaje suspendido presenta varias desventajas adicionales: el entramado necesita ser lo suficientemente rígido para evitar las vibraciones, lo que puede perjudicar la precisión de posicionamiento del efector final. Esto causa un costo adicional y un diseño voluminoso. Además, el trabajo de mantenimiento y reparación es más difícil que en los mecanismos en serie tradicionales, y el robot necesita estar bien sellado para evitar la contaminación de las piezas de trabajo subyacentes o cintas transportadoras. Los dispositivos de las revelaciones anteriormente mencionadas tampoco permiten el posicionamiento manual ya que se colapsan bajo la influencia de la gravedad.
Para reducir la superficie ocupada de los robots paralelos y evitar la desventajosa suspensión de un entramado, se han propuesto diseños alternativos. Por ejemplo, el manipulador presentado en la Patente U.S. Nº
5.539.291 emplea tres brazos interpuestos entre una base y el elemento en movimiento para desplazar un objeto en un espacio de trabajo cilíndrico con tres grados de libertad. Dos brazos operan en un plano horizontal y determinan la distancia radial y orientación del elemento en movimiento por una biela y un miembro de transmisión de posición, que mantiene el elemento en movimiento e una inclinación fija respecto a la base. El tercer brazo opera en un plano vertical e influye en la posición axial del elemento en movimiento en el espacio de trabajo cilíndrico. La asociación funcional de los miembros de transmisión de posición con las bielas de los dos primeros brazos lleva a un diseño frágil y complicado. En particular, la implementación revelada con dos ruedas opuestas y un cable no es sólo no deseable en términos de costes de producción y montaje, sino que también reduce la precisión y rigidez del mecanismo. El mecanismo tampoco es capaz de de orientar independientemente un objeto, es decir, rotarlo sobre el eje vertical (z). El robot también se colapsa bajo la influencia de la gravedad.
Para simplificar el diseño, se han revelado mecanismos alternativos similares al presentado en la Patente
U.S. Nº 5.539.291. Por ejemplo la WO 02/22320 muestra un manipulador para mover un objeto en el espacio con tres brazos. Dos brazos son montados en una columna central y actuados rotativamente para moverse en planos horizontales mientras que el tercer brazo es actuado para operar en el plano vertical. Las conexiones conectan los brazos al efector final por articulaciones, que descansan en una línea común de simetría. Este tipo de disposición de conexiones requiere una gran cantidad de espacio en el efector final y complica su diseño. Además, no es posible colocar componentes adicionales como herramientas de trabajo o actuadores en la línea de simetría y cerca de las conexiones. Esto, sin embargo, sería deseable para reducir el momento de inercia sobre la línea de simetría. En una de las realizaciones reveladas, el actuador del tercer brazo está montado y rotado por uno de los otros brazos, causando inercia adicional y cargas... [Seguir leyendo]
Reivindicaciones:
1. Un mecanismo para posicionar y orientar un objeto en el espacio con al menos tres grados de libertad, el mecanismo comprende:
una base (1);
un brazo principal (2; 10, 5, 80, 14) el mencionado brazo principal comprende una plataforma (19) montada rotativamente en la mencionada base y que se permite que rote sobre un eje central (A) y un componente final
(80) para sostener el mencionado objeto; y
un primer y un segundo brazos de apoyo (3, 4), cada uno de los mencionados primer y segundo brazos de apoyo comprende un brazo actuador (30, 40) conectado rotativamente a la mencionada base, un actuador (32, 42) para rotar el mencionado brazo actuador en relación a la mencionada base sobre un primer y segundo eje de actuador respectivo (B, C) y un antebrazo (34, 44) conectado moviblemente al mencionado brazo actuador,
caracterizado en que el mencionado brazo principal comprende además medios de articulación (5; 13, 16, 51, 55, 53; 13, 16, 51, 55, 57; 13, 16, 61, 65) interpuestos entre la mencionada plataforma y el mencionado componente final, los mencionados medios de articulación permiten al mencionado componente final dos grados de libertad traslacionales respecto a la mencionada plataforma y mantienen la inclinación del mencionado componente final respecto al mencionado eje central para todas las posiciones y orientaciones del mencionado componente final, y un actuador (14) para influir uno de los mencionados grados de libertad traslacionales del mencionado componente final, en donde los antebrazos del primer y segundo brazo de apoyo mencionado están conectados moviblemente al mencionado brazo principal, de tal forma que el mencionado primer y segundo brazo de apoyo influyen la posición y orientación del mencionado componente final, y en donde los mencionados medios de articulación (5) comprenden un brazo actuador (13) conectado rotativamente a la mencionada plataforma (10) y accionado por el actuador (14) del mencionado brazo principal en relación a la mencionada plataforma sobre un eje del actuador principal (D), un antebrazo (16) conectado moviblemente al mencionado brazo actuador (13) con al menos un grado de libertad rotacional sobre un eje del antebrazo (E), el mencionado antebrazo estando además conectado moviblemente al mencionado componente final (80) con al menos un grado de libertad rotacional sobre un eje final (F), y en donde el mencionado eje del actuador principal (D) es sustancialmente perpendicular al mencionado eje central (A) y sustancialmente paralelo al mencionado eje del antebrazo (E) y el mencionado eje final (F) para todas las posiciones y orientaciones del mencionado componente final (80).
2. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque los mencionados medios de articulación
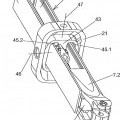
(5) además comprenden una conexión de referencia (53) conectada rotativamente al brazo actuador (13) del mencionado brazo principal (2) sobre el mencionado eje del antebrazo (E), una primera conexión (51) conectada moviblemente tanto a la mencionada plataforma (10) como a la conexión de referencia, la mencionada primera conexión siendo de igual longitud que el brazo actuador del mencionado brazo principal y contrarrestado en paralelo al mismo, y una segunda conexión (55) conectada moviblemente tanto a la mencionada conexión de referencia como al mencionado componente final (80), la mencionada segunda conexión siendo de igual longitud que el antebrazo (16) del mencionado brazo principal y contrarrestado en paralelo al mismo.
3. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque los mencionados medios de articulación
(5) además comprenden una primera polea (60) conectada rígidamente a la mencionada plataforma (10) y centrada en el mencionado eje del actuador principal (D), una segunda y tercera poleas (62, 64) conectadas rotativamente al mencionado brazo actuador (13) y centradas en el mencionado eje del antebrazo (e), en donde la segunda y tercera poleas están conectadas fijamente entre sí, un acuarta polea (66) conectada rígidamente al mencionado componente final (80) y centrada en el mencionado eje final (F), una primera correa (61) uniendo operativamente las mencionadas primera y segunda poleas, y una segunda correa (65) uniendo operativamente las mencionadas tercera y cuarta poleas, en donde las mencionadas primera y segunda poleas tienen la misma forma circunferencial, y en donde la tercera y cuarta poleas tienen la misma forma circunferencial.
4. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque, los mencionados primer y segundo ejes del actuador (B, C) son sustancialmente paralelos al mencionado eje central (A).
5. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque el primer y el segundo ejes del actuador (B, C) son sustancialmente coincidentes con el mencionado eje central (A).
6. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque el antebrazo (34, 44) de al menos uno de los mencionados primer y segundo brazos de apoyo (3, 4) está conectado al respectivo brazo actuador (30, 40) por al menos dos uniones de revoluta (98a, 98b) en serie, las mencionadas uniones de revoluta teniendo mutuamente ejes de rotación no paralelos y que se cruzan.
7. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque el antebrazo (34, 44) de la menos uno de los mencionados primer y segundo brazos de apoyo (3, 4) está conectado al respectivo brazo actuador (30, 40) por una articulación de rótula (33a, 43a).
8. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque el antebrazo (34, 44) de al menos uno de los mencionados primer y segundo brazos de apoyo (3, 4) está conectado al mencionado brazo principal (2) por al menos dos uniones de revoluta (37a, 37b, 47a, 47b) en serie, las mencionadas uniones de revoluta teniendo mutuamente ejes de rotación no paralelos y que se cruzan.
9. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque el antebrazo (34, 44) de al menos uno de los mencionados primer y segundo brazos de apoyo (3, 4) está conectado al mencionado brazo principal (2) por una articulación de rótula (36, 46).
10. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque el antebrazo (34, 44) de al menos uno de los mencionados primer y segundo brazos de apoyo (3, 4) está conectado moviblemente al componente final (80).
11. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque el antebrazo (34, 44) de al menos uno de los mencionados primer y segundo brazos de apoyo (3, 4) está conectado moviblemente directamente al antebrazo
(16) del mencionado brazo principal (2)
12. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque comprende además una conexión intermedia (90, 93) para conectar moviblemente los antebrazos (34, 44) de los mencionados primer y segundo brazos de apoyo (3, 4) al mencionado brazo principal (2), la mencionada conexión intermedia está conectada rotativamente a cada uno de los antebrazos de los mencionados primer y segundo brazos de apoyo, la mencionada conexión intermedia estando además conectada rotativamente al mencionado brazo principal.
13. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque comprende además una herramienta de trabajo (82) montada moviblemente en el mencionado componente final (80) y un actuador de la herramienta de trabajo (100) montado en el mencionado componente final y conectado operativamente a la mencionada herramienta de trabajo, el mencionado actuador de la herramienta de trabajo conduce la mencionada herramienta de trabajo para moverse en relación al mencionado componente final.
14. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque comprende además una herramienta de trabajo (82) montada moviblemente en el mencionado componente final (80) y un actuador de la herramienta de trabajo (101, 114, 122) montado en la mencionada base y conectado operativamente a la mencionada herramienta de trabajo, el mencionado actuador de la herramienta de trabajo conduce la mencionada herramienta de trabajo para moverse en relación al mencionado componente final.
15. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque comprende además una herramienta de trabajo (82) montada rotativamente en el mencionado componente final (80) sobre un eje de la herramienta de trabajo (G), el mencionado eje de la herramienta de trabajo siendo paralelo al mencionado eje central (a) para todas las posiciones y orientaciones del mencionado componente final, y los medios de transmisión (200, 201, 202) interpuestos entre la mencionada base (1) y la mencionada herramienta de trabajo para mantener la orientación de la mencionada herramienta de trabajo sobre el mencionado eje de la herramienta de trabajo respecto a la mencionada base.
16. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque comprende además una articulación de guía (160) interpuesta entre el mencionado brazo principal (2) y los mencionados primer y segundo brazos de apoyo (3, 4), la mencionada articulación de guía impulsa al mencionado (A) de tal forma que los brazos actuadores (30, 40) de los mencionados primer y segundo brazos de apoyo (3, 4) permanecen a una distancia angular sustancialmente igual del mencionado brazo principal.
17. Un mecanismo de acuerdo a la reivindicación 1, caracterizado porque comprende además medios elásticos para equilibrar estáticamente el mencionado mecanismo, los mencionados medios elásticos comprenden al menos un primer muelle (150) interpuesto entre la mencionada plataforma (10) y el mencionado brazo actuador (13) del mencionado brazo principal (2), en donde los mencionados medios elásticos compensan las fuerzas gravitacionales que actúan en los actuadores (14, 32, 42) del mencionado brazo principal (2) y los mencionados primer y segundo brazos de apoyo (3, 4) para al menos una posición y orientación del mencionado componente final (80).
18. Un método para mover un objeto en el espacio con al menos tres grados de libertad e inclinación mantenida, que comprende:
proporcionar un mecanismo, el mencionado mecanismo incluye una base (1), un brazo principal (2; 10, 5, 80, 14) que comprende una plataforma (10) montada rotativamente en la mencionada base y que se permite que rote sobre un eje central (A), un componente final (80) para sostener el mencionado objeto y un actuador (14) para accionar el mencionado brazo principal, el mencionado mecanismo además incluye un primer y segundo brazo de apoyo (3, 4; 30, 34, 40, 44) cada uno comprendiendo un brazo actuador (30, 40) conectado rotativamente a la mencionada base, un actuador (32, 42) para accionar el brazo actuador respectivo, y un antebrazo (34, 44) conectado moviblemente al mencionado brazo actuador, cada uno de los mencionados primer y segundo brazo de apoyo estando interpuesto entre la mencionada base y el mencionado brazo principal; y
accionar el mencionado brazo principal y los mencionados primer y segundo brazos de apoyo con el actuador respectivo para influir al posición y orientación del mencionado componente final en relación a la base,
caracterizado porque mantiene la inclinación del mencionado componente final respecto al mencionado eje central con el mencionado brazo principal y sólo el mencionado brazo principal, en donde el mencionado brazo principal además comprende medios de articulación (5) interpuestos entre la mencionada plataforma y el mencionado componente final (80), los mencionados medios de articulación permitiendo al mencionado componente final dos grados de libertad traslacionales respecto a la mencionada plataforma y manteniendo la inclinación del mencionado componente final respecto al mencionado eje central, y en donde los antebrazos de los mencionados primer y segundo brazos de apoyo están conectados moviblemente al mencionado brazo principal, y en donde los mencionados medios de articulación (5) comprenden un brazo actuador (13) conectado rotativamente a la mencionada plataforma (10) y accionados por el actuador (14) del mencionado brazo principal en relación a la mencionada plataforma sobre un eje del actuador principal (D), un antebrazo (16), conectado moviblemente al mencionado brazo actuador (13) con al menos un grado de libertad rotacional sobre el eje del antebrazo (E), el mencionado antebrazo además estando conectado moviblemente al mencionado componente final (80) con al menos un grado de libertad rotacional sobre el eje final (F), y en donde el mencionado eje del actuador principal (D) es sustancialmente perpendicular al mencionado eje central
(A) y sustancialmente paralelo al mencionado eje del antebrazo (E) y al mencionado eje final (F) para todas las posiciones y orientaciones del componente final (80).
Patentes similares o relacionadas:
 DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
 ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
 MÁQUINA DE CINEMÁTICA PARALELA, del 6 de Mayo de 2011, de EXECHON AB: Máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente, […]
MÁQUINA DE CINEMÁTICA PARALELA, del 6 de Mayo de 2011, de EXECHON AB: Máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente, […]
 ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
 ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT, del 28 de Abril de 2011, de ABB AB: Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, […]
ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT, del 28 de Abril de 2011, de ABB AB: Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, […]
 ROBOT INDUSTRIAL, del 25 de Marzo de 2011, de ABB AB: Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir […]
ROBOT INDUSTRIAL, del 25 de Marzo de 2011, de ABB AB: Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir […]
 ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD, del 16 de Marzo de 2011, de FUNDACION TECNALIA RESEARCH & INNOVATION: Este robot paralelo comprende cuatro cadenas cinemáticas artculadas por uno de sus extremos a una plataforma móvil que prta la herramienta y por su […]
ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD, del 16 de Marzo de 2011, de FUNDACION TECNALIA RESEARCH & INNOVATION: Este robot paralelo comprende cuatro cadenas cinemáticas artculadas por uno de sus extremos a una plataforma móvil que prta la herramienta y por su […]
Máquina herramienta, del 11 de Marzo de 2020, de Hüttmann, Martin: Máquina herramienta para el mecanizado de piezas de trabajo controlado por ordenador, con un soporte de máquina y al menos dos dispositivos […]