ROBOT PARALELO DE CUATRO GRADOS DE LIBERTAD CON ROTACION ILIMITADA.
Robot paralelo de cuatro grados de libertad.#El robot de la invención,
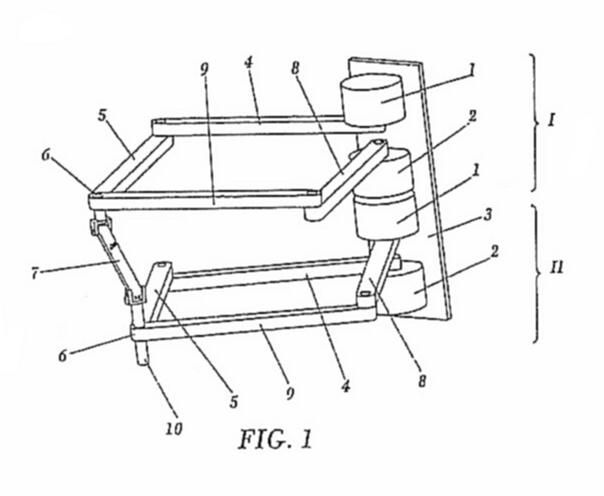
tal y como se observa en la figura 1, está compuesto por dos niveles (I), (II), cada uno de los cuales comprende:#- Dos actuadores (1), (2) unidos a un soporte o columna fija (3).#- Dos brazos (4), (8), dispuestos en posición horizontal, unidos por uno de sus extremos, a los actuadores (1), (2) respectivamente.#- Dos brazos (5), (9) unidos articuladamente, a través de uno de sus extremos, al extremo libre de los brazos (4), (8) respectivamente, y por su otro extremo, unidos entre sí en un punto (6), definiendo un paralelogramo articulado.#Cada uno de los puntos (6) se desplaza en un plano horizontal, con dos grados de libertad.#El punto (6) del nivel (I) y el punto (6) del nivel (II) se unen a través de un mecanismo de acoplamiento (7), realizándose una de las uniones mediante una junta de revolución y la otra mediante una junta cilíndrica.#En el punto (6) que incorpora la junta cilíndrica, se monta la herramienta (10) que puede desplazarse con cuatro grados de libertad, tres translaciones y una rotación según un eje vertical, siendo este giro un giro completo e ilimitado.
Tipo: Resumen de patente/invención.
Solicitante: FUNDACION FATRONIK.
Nacionalidad solicitante: España.
Provincia: GUIPÚZCOA.
Inventor/es: NABAT,VICENT, PIERROT,FRANCOIS, RODRIGUEZ MIJANGOS,MARIA DE LA O, AZCOITIA ARTECHE,JOSE MIGUEL, BUENO ZABALO,RIKARDO, COMPANY,OLIVIER, PEREZ DE ARMENTIA,KARMELE FLOREN.
Fecha de Solicitud: 4 de Abril de 2005.
Fecha de Publicación: .
Fecha de Concesión: 16 de Octubre de 2007.
Clasificación Internacional de Patentes:
- B25J11/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores no previstos en otro lugar.
Clasificación PCT:
- B25J11/00 B25J […] › Manipuladores no previstos en otro lugar.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Funda protectora de robot con una conexión rebordeada, del 10 de Junio de 2020, de Dürr Systems AG: Funda protectora de robot para un robot de revestimiento , en particular un robot de pintura , con a) un elemento de conexión […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Manipulador de alimentos en un almacén, del 13 de Mayo de 2020, de Imaginalis S.r.l: Un manipulador de alimentos (1a) en un almacén ; comprendiendo dicho almacén una pluralidad de estaciones de almacenamiento (1b) en las que […]
Control de movimiento de los conjuntos de robot de seguimiento que fabrican aeronaves, del 15 de Enero de 2020, de THE BOEING COMPANY: Un método que comprende: disponer un conjunto de robot móvil próximo a un fuselaje de una aeronave que se ensambla y configura para […]
Robot humanoide con capacidades para evitar colisiones y de recuperación de trayectoria, del 25 de Diciembre de 2019, de Softbank Robotics Europe: Un procedimiento de control de una trayectoria (530a, 730) de al menos uno de los miembros superiores e inferiores de un robot humanoide, comprendiendo dicho […]
Sistema y método para transportar recipientes de muestras, del 25 de Diciembre de 2019, de BECKMAN COULTER, INC.: Sistema para transportar recipientes de muestras que comprende: una unidad de gestor que comprende una zona de distribución y uno o más […]