ROBOT INDUSTRIAL.
Un robot industrial para movimiento de un objeto (12) en espacio incluyendo una plataforma (1,
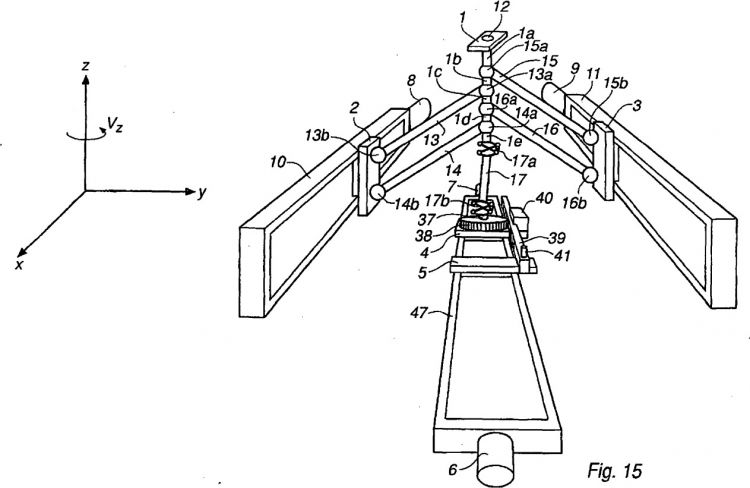
1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir en la plataforma en un primer movimiento e incluyendo un primer accionador con un primer carro linealmente móvil (2) y dos articulaciones (13, 14), cada una de las cuales incluye una unión exterior (13a, 14a) dispuesta en la plataforma y una unión interior (13b, 14b) dispuesta en el primer carro, donde las dos uniones interiores están dispuestas desplazables en paralelo, un segundo brazo dispuesto para influir en la plataforma en un segundo movimiento e incluyendo un segundo accionador con un segundo carro linealmente móvil (3) y dos articulaciones (15, 16), cada una de las cuales incluye una unión exterior (15a,16a) dispuesta en la plataforma y una unión interior (15b,16b) dispuesta en el segundo carro, donde las dos uniones interiores están dispuestas desplazables en paralelo, y un tercer brazo dispuesto para influir en la plataforma en un tercer movimiento e incluyendo un tercer accionador con un tercer carro linealmente móvil (5) y una articulación (17), que incluye una unión exterior (17a) dispuesta en la plataforma y una unión interior (17b) dispuesta en el tercer carro, donde la unión interior está dispuesta linealmente desplazable, teniendo todas las uniones dos o tres grados de libertad, una primera línea (80) definida pa- sando a través de los puntos centrales de las dos uniones exteriores de las dos articulaciones del primer brazo, dicho punto central respectivo se define por el punto matemático en la unión donde los ejes de rotación de la unión se cruzan uno con otro, y una segunda línea (81) definida pasando a través de los puntos centrales de las dos uniones exteriores de las dos articulaciones del segundo brazo, dicho punto central respectivo se define por el punto matemático en la unión donde los ejes de rotación de la unión se cruzan uno con otro, caracterizado porque la primera línea (80) y la segunda línea (81) son paralelas
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09157270.
Solicitante: ABB AB.
Nacionalidad solicitante: Suecia.
Dirección: 721 83 VÄSTERAS SUECIA.
Inventor/es: BROGARDH, TORGNY.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Octubre de 2001.
Clasificación Internacional de Patentes:
- B23Q1/54B3
- B25J17/02F2
Clasificación PCT:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
Fragmento de la descripción:
CAMPO TÉCNICO
La presente invención se refiere a un robot industrial según el preámbulo de la reivindicación 1.
Tal robot se conoce por US-A-6 099 217.
ANTECEDENTES DE LA INVENCIÓN 5
Un manipulador que incluye más de un brazo y donde al menos dos brazos forman una cadena de uniones entre los accionadores del manipulador y la plataforma que se ha de manipular, se denomina un manipulador cinemático paralelo. Para un manipulador cinemático paralelo completamente montado para movimiento de una plataforma con tres grados de libertad (por ejemplo, en las direcciones x, y y z en un sistema de coordenadas cartesianas), se requieren tres brazos de funcionamiento en paralelo, y si los seis grados de libertad de la plataforma han de ser manipulados, se re-10 quieren seis brazos de funcionamiento en paralelo. En muchas aplicaciones industriales donde actualmente se usan manipuladores lineales del denominado tipo puente, normalmente se requieren cuatro grados de libertad, lo que signifi-ca que un manipulador cinemático paralelo correspondiente tendrá cuatro brazos paralelos.
Para obtener un sistema de brazos rígidos con gran capacidad de carga y bajo peso, los brazos inferiores del manipulador cinemático paralelo más próximos a la plataforma manipulada tendrán un total de seis articulaciones que 15 solamente transmiten fuerzas de compresión y de tracción. Para un manipulador para cuatro grados de libertad y cuatro brazos, esto implica que los cuatro brazos inferiores deben compartir las seis articulaciones entre ellos y esto solamente se puede hacer con algunas combinaciones, tales como, por ejemplo, 2/2/1/1 o 3/1/1/1. Si una de las articulaciones se usa para transmitir par además de fuerzas de compresión y de tracción, también se obtienen las siguientes combinacio-nes posibles para un manipulador cinemático paralelo con cuatro grados de libertad: 3/2/1, 2/2/2. Estas combinaciones 20 también se pueden usar cuando solamente se han de manipular tres grados de libertad en la plataforma manipulada.
Cuando se requiere un rango de trabajo rectangular en aplicaciones de manipulador, hoy día se usan los de-nominados manipuladores puente. Estos manipulan una plataforma normalmente con cuatro grados de libertad: x, y, z y rotación alrededor del eje z. Para ello, estos manipuladores están compuestos de un eje de rotación y tres recorridos lineales conectados en serie, en los que las unidades móviles se mueven en las direcciones x, y y z. La primera unidad 25 móvil, que es movida a lo largo de un primer recorrido lineal de un accionador, soporta un segundo recorrido lineal mon-tado perpendicular al primer recorrido lineal. En el segundo recorrido lineal, hay entonces una segunda unidad móvil que, a su vez, soporta un tercer recorrido lineal, que está montado perpendicular a ambos recorridos lineales primero y segundo. En el tercer recorrido lineal hay una tercera unidad móvil, que soporta un eje de rotación cuando el manipula-dor tiene cuatro grados de libertad. 30
La conexión serie de los recorridos lineales con sus unidades móviles y accionadores asociados impone varias restricciones en los manipuladores puente actuales.
* El manipulador es muy pesado, lo que limita su velocidad de acción y da lugar a una necesidad de accionado-res caros y que consumen energía (motores).
* El manipulador es débil y cuando se mueven objetos o herramientas, se obtiene una oscilación indeseada del 35 manipulador en caso de movimiento a lo largo del recorrido donde se haya de efectuar el movimiento, y espe-cialmente cuando el movimiento se haya de parar, se obtienen los denominados sobredisparos.
* El manipulador es elástico cuando la plataforma ha de generar fuerzas entre herramientas y objetos, a no ser que se usen soluciones muy caras y complejas para los recorridos de calza.
* Para los accionadores móviles con sus sensores de medición asociados, se precisa cableado móvil, que hace 40 pobre la fiabilidad de los manipuladores puente.
* Es difícil obtener alta exactitud del manipulador sin proporcionar soluciones caras que implican, por ejemplo, cojinetes neumáticos, que al mismo tiempo dan al manipulador limitada velocidad de acción.
* Se usan normalmente dos recorridos lineales paralelos para soportar el segundo recorrido lineal en la cadena cinemática en serie. Esto da origen a un efecto similar al de un cajón de una cómoda que se acuña cuando es 45 empujado, y cuya gestión requiere soluciones especiales costosas.
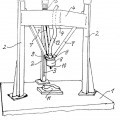
Todas estas limitaciones al usar manipuladores puente pueden ser eliminadas por un manipulador cinemático paralelo que sea movido por recorridos lineales de funcionamiento en paralelo, que no necesitan soportarse uno a otro, pero donde todos los recorridos pueden estar montados en una estructura de bastidor fija. Un ejemplo de tal robot ci-nemático paralelo es Hexaglide, desarrollado en el Technical Institute of Technology ETH en Zurich. La cinemática de 50 esto es clara por la figura 1, que se describe en la sección DESCRIPCIÓN DE LAS REALIZACIONES PREFERIDAS. Aquí, se usan seis unidades móviles en tres recorridos lineales para guiar seis grados de libertad de la plataforma mani-pulada con la ayuda de seis articulaciones paralelas. Este manipulador tendrá un sistema de brazos con un peso muy bajo, será rígido, puede lograr grandes fuerzas de herramienta sin deformación, no tiene cableado móvil y puede tener exactitud muy alta. Sin embargo, este manipulador tiene un rango de trabajo demasiado pequeño para sustituir los ma-55 nipuladores puente que se usan actualmente en varias aplicaciones industriales. Además, este robot cinemático paralelo requiere seis accionadores también cuando solamente se han de manipular cuatro grados de libertad, lo que da lugar a un precio innecesariamente alto del manipulador. Finalmente, los programas de control que han de vigilar el movimiento del manipulador son amplios.
RESUMEN DE LA INVENCIÓN
La presente invención incluye una nueva estructura base para manipuladores cinemáticos paralelos basados en accionadores movidos linealmente y que resuelven los problemas que surgen en el manipulador cinemático paralelo descrito anteriormente. Con las realizaciones para manipuladores cinemáticos paralelos en base a la nueva estructura base descrita en esta invención, la mayor parte de los actuales requisitos industriales de los manipuladores con rangos 5 de trabajo rectangulares se pueden resolver a un costo más bajo y con un rendimiento más alto comparado con las estructuras puente cinemáticas en serie corrientes. Ejemplos de manipuladores puente que pueden ser sustituidos por una estructura cinemática paralela según la invención son:
* Máquinas de medición de coordenadas para medición de alta precisión de componentes y productos prefabri-cados en la industria de ingeniería. 10
* Máquinas herramientas para rectificado, taladrado, fresado, desbarbado y otro maquinado.
* Máquinas de prueba en fabricación de semiconductores, donde las placas de semiconductores se han de mo-ver a una estación de sonda y presionarse con gran fuerza contra una matriz de contactos para medir la cali-dad del material semiconductor.
* Máquinas de montaje para electrónica, donde los componentes electrónicos se han de mover con gran veloci-15 dad y alta precisión a una posición correcta, por ejemplo, en una placa de circuitos impresos.
* Robots de manipulación para aplicaciones farmacéuticas, por ejemplo para mover microplacas durante el screening.
* Robots de manipulación para mover componentes y productos en la industria de ingeniería, por ejemplo duran-te el montaje de coches. 20
Consiguientemente, la invención proporciona un robot industrial como el definido en la reivindicación 1, así como un uso de dicho robot.
Realizaciones preferidas se definen en las reivindicaciones dependientes.
El objeto principal de la invención ha de sugerir formas y medios de fabricar un manipulador con cuatro grados de libertad de colocación (x, y, z) de la plataforma manipulada. Se obtienen ventajas adicionales realizando la rotación 25 de la plataforma manipulada alrededor de un eje (el eje z) sin originar simultáneamente la rotación de la plataforma manipulada alrededor de cualquier otro eje (el eje x o z). Esta manipulación se ha de realizar con solamente cuatro unidades móviles en recorridos lineales paralelos y se deberá hacer...
Reivindicaciones:
1. Un robot industrial para movimiento de un objeto (12) en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir en la plataforma en un primer movimiento e incluyendo un primer accionador con un primer carro linealmente móvil (2) y dos articulaciones (13, 14), cada una de las cuales incluye una unión exterior (13a, 14a) dispuesta en la plataforma y una unión interior (13b, 14b) dispuesta en el primer carro, 5 donde las dos uniones interiores están dispuestas desplazables en paralelo, un segundo brazo dispuesto para influir en la plataforma en un segundo movimiento e incluyendo un segundo accionador con un segundo carro linealmente móvil (3) y dos articulaciones (15, 16), cada una de las cuales incluye una unión exterior (15a,16a) dispuesta en la plataforma y una unión interior (15b,16b) dispuesta en el segundo carro, donde las dos uniones interiores están dispuestas despla-zables en paralelo, y un tercer brazo dispuesto para influir en la plataforma en un tercer movimiento e incluyendo un 10 tercer accionador con un tercer carro linealmente móvil (5) y una articulación (17), que incluye una unión exterior (17a) dispuesta en la plataforma y una unión interior (17b) dispuesta en el tercer carro, donde la unión interior está dispuesta linealmente desplazable, teniendo todas las uniones dos o tres grados de libertad, una primera línea (80) definida pa-sando a través de los puntos centrales de las dos uniones exteriores de las dos articulaciones del primer brazo, dicho punto central respectivo se define por el punto matemático en la unión donde los ejes de rotación de la unión se cruzan 15 uno con otro, y una segunda línea (81) definida pasando a través de los puntos centrales de las dos uniones exteriores de las dos articulaciones del segundo brazo, dicho punto central respectivo se define por el punto matemático en la unión donde los ejes de rotación de la unión se cruzan uno con otro, caracterizado porque la primera línea (80) y la segunda línea (81) son paralelas.
2. Un robot industrial según la reivindicación 1, caracterizado porque las articulaciones del primer brazo, el primer carro 20 y la plataforma forman un primer paralelogramo, y porque las articulaciones del segundo brazo, el segundo carro y la plataforma forman un segundo paralelogramo.
3. Un robot industrial según cualquiera de las reivindicaciones 1-2, caracterizado porque el primer accionador incluye un primer motor y un primer recorrido dispuesto en un primer plano y porque el primer carro es linealmente móvil a lo largo del primer recorrido, porque el segundo accionador incluye un segundo motor y un segundo recorrido dispuesto en un 25 segundo plano y porque el segundo carro es linealmente móvil a lo largo del segundo recorrido.
4. Un robot industrial según la reivindicación 1-3, caracterizado porque el tercer accionador incluye un tercer motor y un tercer recorrido dispuesto en un tercer plano y porque el tercer carro es linealmente móvil a lo largo del tercer recorrido.
5. Un robot industrial según la reivindicación 3 o la reivindicación 4, caracterizado porque al menos dos de los planos están dispuestos en paralelo. 30
6. Un robot industrial según la reivindicación 3 o la reivindicación 4, caracterizado porque al menos dos de los planos coinciden.
7. Un robot industrial según cualquiera de las reivindicaciones 3-6, caracterizado porque el tercer plano no coincide con los planos primero y segundo.
8. Un robot industrial según cualquiera de las reivindicaciones 3-7, caracterizado porque el tercer recorrido está dispues-35 to entre el primer recorrido y el segundo recorrido.
9. Un robot industrial según cualquiera de las reivindicaciones 3-8, caracterizado porque el tercer plano forma un ángulo con el primer plano y el segundo plano.
10. Un robot industrial según cualquiera de las reivindicaciones 3-7 o 9, caracterizado porque dos de los recorridos están integrados en uno y el mismo recorrido, por lo que dos carros son individualmente móviles a lo largo del recorrido 40 integrado.
11. Un robot industrial según cualquiera de las reivindicaciones 3-10, caracterizado porque dichas articulaciones están dispuestas para operar entre los recorridos lineales.
12. Un robot industrial según cualquiera de las reivindicaciones 3-11, caracterizado por que dichos recorridos son para-lelos. 45
13. Un robot industrial según alguna de las reivindicaciones precedentes, caracterizado porque el primer brazo incluye una articulación adicional con una unión interior dispuesta en el primer carro y una unión exterior dispuesta en la plata-forma, por lo que todas las articulaciones del primer brazo están dispuestas en paralelo.
14. Un robot industrial según cualquiera de las reivindicaciones 1-13, caracterizado porque la primera línea y la segunda línea coinciden. 50
15. Un robot industrial según cualquiera de las reivindicaciones 1-13, caracterizado porque la primera línea y la segunda línea no coinciden.
16. Uso de un robot industrial según cualquiera de las reivindicaciones 1-15, para montaje en la industria de fabricación.
17. Uso de un robot industrial según cualquiera de las reivindicaciones 1-15, para transporte de objetos en la industria de transporte. 55
Patentes similares o relacionadas:
ROBOT PARALELO, del 18 de Agosto de 2011, de MERZ, MICHAEL: Un mecanismo para posicionar y orientar un objeto en el espacio con al menos tres grados de libertad, el mecanismo comprende: una base ; un brazo […]
 DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
 ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
 MÁQUINA DE CINEMÁTICA PARALELA, del 6 de Mayo de 2011, de EXECHON AB: Máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente, […]
MÁQUINA DE CINEMÁTICA PARALELA, del 6 de Mayo de 2011, de EXECHON AB: Máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente, […]
 ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
 ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT, del 28 de Abril de 2011, de ABB AB: Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, […]
ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT, del 28 de Abril de 2011, de ABB AB: Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, […]
 ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD, del 16 de Marzo de 2011, de FUNDACION TECNALIA RESEARCH & INNOVATION: Este robot paralelo comprende cuatro cadenas cinemáticas artculadas por uno de sus extremos a una plataforma móvil que prta la herramienta y por su […]
ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD, del 16 de Marzo de 2011, de FUNDACION TECNALIA RESEARCH & INNOVATION: Este robot paralelo comprende cuatro cadenas cinemáticas artculadas por uno de sus extremos a una plataforma móvil que prta la herramienta y por su […]
 MANIPULADOR CINEMATICO PARALELO Y METODO DE FUNCIONAMIENTO DEL MISMO, QUE INCLUYE ACCIONADORES EMPAREJADOS, del 25 de Mayo de 2010, de ABB AB: Un robot industrial incluyendo un manipulador cinemático paralelo incluyendo una plataforma estacionaria, una plataforma móvil , y tres […]
MANIPULADOR CINEMATICO PARALELO Y METODO DE FUNCIONAMIENTO DEL MISMO, QUE INCLUYE ACCIONADORES EMPAREJADOS, del 25 de Mayo de 2010, de ABB AB: Un robot industrial incluyendo un manipulador cinemático paralelo incluyendo una plataforma estacionaria, una plataforma móvil , y tres […]