Radar de detección de objetivos aéreos montado en una aeronave particularmente para evitar obstáculos en vuelo.
Dispositivo de radar de detección de objetivos aéreos (2) transportado por una aeronave (1),
comprendiendodicho dispositivo unos medios de emisión de una onda de hiperfrecuencia en dirección a un objetivo (2), teniendodicha onda (22, 45, 51, 52, 53, 54) una forma doble, estando compuesta una primera forma de onda (22, 45) de almenos dos sinusoides (221, 222) de frecuencias diferentes (F1, F2) emitidas simultáneamente, comprendiendo elradar unos circuitos de recepción que reciben las señales reflejadas por el objetivo y unos medios de análisis queefectúan la detección del objetivo a partir de las señales recibidas, caracterizado porque la segunda forma de ondaes del tipo de pulsos (51, 52, 53, 54), siendo la forma de onda emitida función de la velocidad relativa del objetivo (2)con relación al portador y de la velocidad absoluta del portador (1).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10171149.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY SUR SEINE FRANCIA.
Inventor/es: CORNIC, PASCAL, KEMKEMIAN, STEPHANE, GARREC,PATRICK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/48 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › que utilizan haces múltiples en emisión o en recepción.
- G01S13/524 G01S 13/00 […] › basada en el cambio de fase o de frecuencia provocado por el movimiento de los objetos, respecto a las señales transmitidas, p. ej. MTI coherente.
- G01S13/536 G01S 13/00 […] › que utilizan la transmisión de ondas continuas no moduladas, ondas moduladas en amplitud, en frecuencia o en fase.
- G01S13/58 G01S 13/00 […] › Sistemas de determinación de velocidad o trayectoria; Sistemas de determinación del sentido del movimiento.
- G01S13/93 G01S 13/00 […] › para anticolisión.
PDF original: ES-2416067_T3.pdf
Fragmento de la descripción:
Radar de detección de objetivos aéreos montado en una aeronave particularmente para evitar obstáculos en vuelo La presente invención se refiere a un radar para la detección de objetivos aéreos montado en una aeronave, por ejemplo un dron. Se aplica particularmente para detectar y evitar obstáculos en vuelo.
La realización de una función de radar de detección de obstáculos aéreos no cooperativos para aeronaves, en particular para drones, es esencial para permitir la inserción de aeronaves autopilotadas en el dominio aéreo no segregado. Participa en la función de detección y de evitación de obstáculos conocida con el nombre de “Sense and Avoid”.
Un radar de ese tipo debe disponer de un campo de observación muy amplio, típicamente ! 120º en azimut y ! 15º en elevación, y debe ser capaz de barrer el espacio en un tiempo muy corto, teniendo en cuenta el tiempo necesario para desencadenar una maniobra de evitación en caso de riesgo de colisión. Estas características corresponden aproximadamente a la capacidad de observación del entorno de un piloto “humano”.
En estas condiciones, es interesante utilizar una antena o varias antenas de gran campo de emisión, y formar en la recepción múltiples haces simultáneamente en el dominio iluminado.
No obstante, un problema entonces es la detección de los objetos móviles en vuelo, sobre un fondo de eco importante en el suelo, en particular cuando el haz de la antena es relativamente amplio y el nivel de los lóbulos secundarios es importante. Cuanto más reducida sea la altitud de la aeronave, más complicado de tratar se convierte este problema.
Existe por tanto una necesidad de definir un radar capaz de detectar unas aeronaves en vuelo que presenten un riesgo de colisión con el portador, cualesquiera que sean sus velocidades de aproximación. Por otro lado, el volumen, el peso y el coste de un radar de ese tipo deberían ser igualmente reducidos al máximo.
No existen actualmente dispositivos de radar que respondan a esta necesidad. Existen no obstante unas funciones comparables particularmente para los aviones militares, que disponen de un modo de detección aire-aire. Estos radares cubren un dominio en la distancia más extendido del que es necesario en la presente aplicación, definida anteriormente, por el contrario cubren un dominio angular netamente más reducido y con un periodo de renovación más largo.
Estos modos utilizan una antena direccional, que escanea el dominio de supervisión de manera mecánica o electrónica, lo que no es compatible con la presente aplicación, teniendo en cuenta la amplitud del dominio a supervisar y el tiempo de actualización máximo, que es del orden del segundo.
La detección se efectúa clásicamente mediante detección del efecto doppler, lo que permite en un cierto grado separar los objetivos del eco del suelo. Estos modos se conocen bajo los nombres de HFR, MFR y BFR, que corresponden respectivamente a los modos de emisión en alta, media y baja frecuencia de repetición. Están ampliamente descritos en la literatura.
En el modo HFR, la detección de los objetivos de aproximación lenta está limitado por la calidad de los lóbulos secundarios de la antena y agravada por el gran número de solapes en la distancia en el dominio de búsqueda de los objetivos. Existen unos tratamientos para minimizar estas molestias pero son muy complicados. En el modo MFR, la detección a la vez de los objetivos lentos y de los objetivos rápidos puede quedar afectada por el eco visto por los lóbulos secundarios de la antena. El tratamiento es complejo, debido al hecho de la necesidad de gestionar simultáneamente las ambigüedades en la distancia y las ambigüedades de velocidad. Como anteriormente existen unos procedimientos de tratamiento pero son muy pesados en términos de realización.
En el modo BFR, los rendimientos de detección en “look down” son reducidos debido al hecho del gran número de solapes en la velocidad, en particular:
- El eco del suelo del lóbulo principal ocupa la mayor parte del dominio en velocidad ambigua; -Hay igualmente riesgo de falsas alarmas sobre vehículos en el suelo debido al hecho de las ambigüedades en
velocidad que mezclan los vehículos lentos y rápidos. -Las ambigüedades doppler son complejas de eliminar. -Finalmente, este tipo de modo necesita una potencia de cresta elevada.
En todo caso, las soluciones realizadas en un avión militar no pueden ser aplicadas directamente sobre un avión autopilotado, teniendo en cuenta la amplitud del dominio angular a explorar e igualmente por unas razones evidentes de coste.
Por otro lado, los dominios de velocidad y de alcance para la aplicación de detección y evitación de obstáculos son diferentes de los modos de aire/aire para avión militar.
Un documento US 3 787 853 A describe un sistema de radar adecuado para detectar objetivos aéreos.
Un objeto de la invención es particularmente permitir la realización de un radar capaz de detectar aeronaves en vuelo que presenten un riesgo de colisión con el portador de dicho radar, cualesquiera que sean las velocidades de aproximación en juego, de manera económica. Con este fin, la invención tiene por objeto un dispositivo de radar de detección de objetivos aéreos transportado por una aeronave, comprendiendo el dispositivo unos medios de emisión en una onda de hiperfrecuencia en dirección a un objetivo, teniendo dicha onda una forma doble, estando compuesta una primera forma de onda por al menos dos sinusoides de frecuencias diferentes emitidas simultáneamente, comprendiendo el radar unos circuitos de recepción que reciben las señales reflejadas por el objetivo y unos medios de análisis que efectúan la detección del objetivo a partir de las señales recibidas.
La segunda forma de onda es del tipo de pulsos.
La forma de onda emitida es función de la velocidad relativa del objetivo con relación al portador y de la velocidad absoluta del portador.
En un modo de realización posible, la primera forma de onda se emite cuando la velocidad relativa del objetivo es superior a la velocidad absoluta del portador. Igualmente, la segunda forma de onda se puede emitir cuando la velocidad relativa del objetivo es inferior a la velocidad absoluta del portador. En un modo posible de realización, la primera forma de onda utiliza un número N de sinusoides de frecuencias diferentes, estando compuesta la onda emitida por un par de dos sinusoides emitidas simultáneamente, modificándose secuencialmente los pares de sinusoides, comprendiendo dicho dispositivo unos medios de tratamiento que efectúan una eliminación de la ambigüedad en la distancia a partir de las fases diferenciales asociadas a los pares de sinusoides.
En otro modo posible de realización, la primera forma de onda está compuesta por N sinusoides de frecuencias diferentes emitidas simultáneamente, comprendiendo dicho dispositivo unos medios de tratamiento que calculan las fases diferenciales asociadas a cada par de sinusoides constituido entre las N sinusoides emitidas y efectuando una eliminación de la ambigüedad en la distancia a partir de estas fases diferenciales.
Los pulsos de la segunda forma de onda están codificados, por ejemplo, en frecuencia.
Una repetición puede incluir un conjunto de pulsos codificados cada uno según una frecuencia distinta. La duración 25 de la repetición está adaptada, por ejemplo, en permanencia en función de la velocidad del portador.
La duración de la repetición puede estar adaptada en permanencia en función del tiempo de reacción del portador para evitar una colisión con el objetivo. Realizándose la emisión sobre uno o varios haces fijos, la recepción se efectúa por ejemplo en la formación de haces mediante el cálculo.
La emisión de N sinusoides simultáneas se efectúa por ejemplo mediante N amplificadores, asociado cada uno a 30 una sinusoide, estando cada amplificador, por ejemplo, conectado a una antena de emisión distinta.
Surgirán otras características y ventajas de la invención con la ayuda de la descripción a continuación realizada en relación con los dibujos adjuntos que representan:
-la figura 1, una ilustración de una aeronave, por ejemplo un dron, portador de un radar de acuerdo con la invención en presencia de otra aeronave objetivo; 35 -la figura 2, un ejemplo de una primera forma de onda de un radar de acuerdo con la invención, adaptado a un
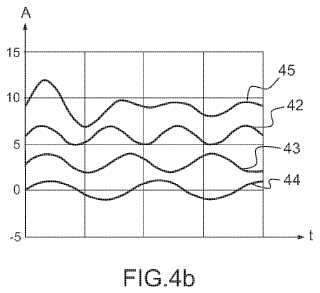
primer dominio de velocidades relativas entre el portador y un objetivo; -la figura 3, un esquema sinóptico de un ejemplo de radar de acuerdo con la invención; -las figuras 4a y 4b, otros ejemplos de la primera forma de onda antes citada;... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de radar de detección de objetivos aéreos (2) transportado por una aeronave (1) , comprendiendo dicho dispositivo unos medios de emisión de una onda de hiperfrecuencia en dirección a un objetivo (2) , teniendo dicha onda (22, 45, 51, 52, 53, 54) una forma doble, estando compuesta una primera forma de onda (22, 45) de al menos dos sinusoides (221, 222) de frecuencias diferentes (F1, F2) emitidas simultáneamente, comprendiendo el radar unos circuitos de recepción que reciben las señales reflejadas por el objetivo y unos medios de análisis que efectúan la detección del objetivo a partir de las señales recibidas, caracterizado porque la segunda forma de onda es del tipo de pulsos (51, 52, 53, 54) , siendo la forma de onda emitida función de la velocidad relativa del objetivo (2) con relación al portador y de la velocidad absoluta del portador (1) .
2. Dispositivo de radar de acuerdo con la reivindicación 1, caracterizado porque la primera forma de onda (22, 45) es emitida cuando la velocidad relativa del objetivo (2) es superior a la velocidad absoluta del portador (1) .
3. Dispositivo de radar de acuerdo con la reivindicación 1, caracterizado porque la segunda forma de onda (51, 52, 53, 54) es emitida cuando la velocidad relativa del objetivo (2) es inferior a la velocidad absoluta del portador (1) .
4. Dispositivo de radar de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque la primera forma de onda utiliza un número N de sinusoides de frecuencias diferentes, estando compuesta la onda emitida por un par de dos sinusoides emitidas simultáneamente, siendo modificadas los pares de sinusoides secuencialmente, comprendiendo dicho dispositivo unos medios de tratamiento que efectúan una eliminación de la ambigüedad en distancia a partir de las fases diferenciales asociadas a los pares de sinusoides.
5. Dispositivo de radar de acuerdo con una cualquiera de las reivindicaciones 1 a 3, caracterizado porque la primera forma de onda está compuesta de N sinusoides de frecuencias diferentes emitidas simultáneamente, comprendiendo dicho dispositivo unos medios de tratamiento que calculan las fases diferenciales asociadas a cada par de sinusoides constituido entre las N sinusoides emitidas, y efectuando una eliminación de la ambigüedad en distancia a partir de estas fases diferenciales.
6. Dispositivo de radar de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque los pulsos (51, 52, 53, 54) de la segunda forma de onda están codificados en frecuencia (F’1, F’2, F’3, F’4) .
7. Dispositivo de radar de acuerdo con la reivindicación 6, caracterizado porque una repetición comprende un conjunto de pulsos (51, 52, 53, 54) codificados cada uno de acuerdo con una frecuencia distinta (F’1, F’2, F’3, F’4) .
8. Dispositivo de radar de acuerdo con la reivindicación 7, caracterizado porque la duración de la repetición (Tr) está adaptada en permanencia en función de la velocidad del portador (1) .
9. Dispositivo de radar de acuerdo con una cualquiera de las reivindicaciones 7 u 8, caracterizado porque la duración de la repetición (Tr) está adaptada en permanencia en función del tiempo de reacción del portador para evitar una colisión con el objetivo.
10. Dispositivo de radar de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque siendo realizada la emisión sobre uno o varios haces fijos, la recepción se efectúa mediante el cálculo en la formación de haces.
11. Dispositivo de radar de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque la emisión de N sinusoides simultáneas es efectuada mediante N amplificadores, relacionado cada uno con una sinusoide.
12. Dispositivo de acuerdo con la reivindicación 11, caracterizado porque cada amplificador está conectado a una antena de emisión distinta.
Patentes similares o relacionadas:
SISTEMA DE MICRO CAMARAS CON SENSORES DE MOVIMIENTO PARA AYUDA A LA CONDUCCIÓN, del 21 de Enero de 2020, de PALAZZOLO, Umberto: 1. Sistema de micro cámaras con sensores de movimiento para ayuda a la conducción, caracterizado esencialmente, porque está formado por micro cámaras […]
Mejoras aportadas y relativas a los datos de rumbos de navegación y/o de velocidad de un buque, del 15 de Octubre de 2019, de BAE SYSTEMS PLC: Un método para determinar una velocidad de un buque, en donde el buque es una embarcación , ubicada en una zona litoral, que comprende las etapas de: detectar objetos […]
Dispositivo para un vehículo, del 11 de Septiembre de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para medir un posible espacio de estacionamiento (P) mediante un vehículo que pasa al espacio de estacionamiento (P), donde mediante un […]
Aparato de tratamiento de señales para generar un mapa de Alcance-Doppler, del 28 de Agosto de 2019, de AptCore Ltd: Aparato de tratamiento de señales para generar un mapa de alcance-Doppler , comprendiendo el aparato: una unidad de cálculo de transformada […]
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado, del 31 de Julio de 2019, de AUDI AG: Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por […]
SISTEMA DE CONDUCCIÓN ASISTIDA BASADO EN UNA RED DE COMUNICACIÓN DE ONDA MILIMÉTRICA Y DETECCIÓN DE OBJETOS POR TÉCNICAS RADAR, del 27 de Junio de 2019, de KITAZAWA MOLINA, Elvia Isabel: La presente invención describe un sistema de integración de componentes en vehículos y un método de operación de los mismos que posibilita al conductor […]
MÉTODO DE DETECCIÓN Y GESTIÓN DE FATIGA MENTAL DURANTE LA CONDUCCIÓN BASADO EN ANALISIS DE MIRADA Y DETECCION DE OBJETOS, del 27 de Junio de 2019, de PARDO GUZMAN, Dino Alejandro: Un método y detección y gestión de fatiga mental para aumentar la seguridad y confort de los conductores de tracto camiones, basado en análisis […]
Sistema satelital autónomo de evitación de desechos orbitales, del 15 de Mayo de 2019, de Briskman, Robert: Un sistema satelital que puede evitar de forma autónoma una colisión con desechos orbitales , que incluye un satélite , […]