Aparato para procesar material biológico.
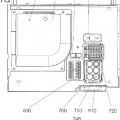
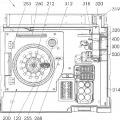
Proceso para transportar un recipiente (160) al interior de un portarrecipientes (120) o desde un portarrecipientes (120),
en donde el recipiente (160) comprende una tapa (166) unida a él para cerrar una abertura del recipiente, que comprende las etapas de:
- agarrar o sostener el recipiente (160) por medio de una unidad de agarre (400);
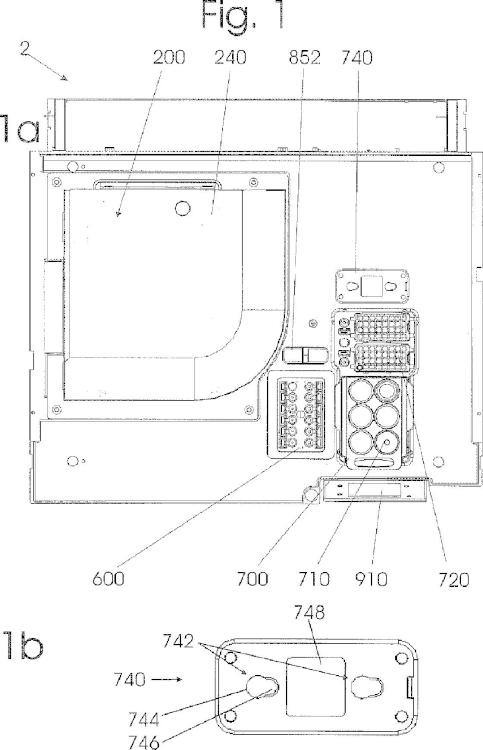
- sostener la tapa (166) en una posición definida con respecto al recipiente (160), que es una posición abierta de la tapa, por medio de un portatapas (414) de la unidad de agarre (400), y
- mover el recipiente al interior del portarrecipientes o fuera del portarrecipientes por medio de la unidad de agarre (400) moviendo de este modo la tapa dentro o fuera de un receptor de tapa del portarrecipientes, mientras se mantiene la posición definida de la tapa con respecto al recipiente, en donde
el portatapas (414) proporciona un tope mecánico para la tapa (166), y en donde
durante la etapa de sostener la tapa, la tapa (166) está presionada contra el tope por la fuerza elástica de un elemento de conexión (164) que conecta la tapa (166) al recipiente (160) y, de este modo, lo sostiene en la posición definida.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/066763.
Solicitante: QIAGEN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: QIAGEN STRASSE 1 40724 HILDEN ALEMANIA.
Inventor/es: KARL, ANDREAS, GEIGER, ADRIAN, VOIT,THOMAS, ZBINDEN,MARKUS, SCHMIEDE,ANDREAS, SCHAEFER,ANDREAS, TSCHOPP,WALTER, HIBBING,HARALD, EIGEMEIER,FRANK, BEHRMANN,VOLKER, KOPP,DIETMAR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B01L9/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B01 PROCEDIMIENTOS O APARATOS FISICOS O QUIMICOS EN GENERAL. › B01L APARATOS DE LABORATORIO PARA LA QUIMICA O LA FISICA, DE USO GENERAL (aparatos de uso médico o farmacéutico A61; aparatos para aplicaciones industriales o aparatos de laboratorio cuya estructura y funciones son comparables a las de aparatos industriales similares, ver las clases relativas a los aparatos industriales, en particular las subclases B01 y C12; aparatos de separación o de destilación B01D; dispositivos de mezcla o de agitación B01F; atomizadores B05B; tamices, cribas B07B; tapones, capuchones B65D; manipulación de líquidos en general B67; bombas de vacío F04; sifones F04F 10/00; grifos, válvulas F16K; tubos, empalmes para tubos F16L; aparatos especialmente adaptados al estudio y análisis de materiales G01, particularmente G01N; aparatos eléctricos u ópticos, ver las subclases apropiadas en las secciones G y H). › B01L 9/00 Dispositivos de soporte; Dispositivos de sujeción (tenacillas, pinzas B25B). › Soportes para tubos de ensayo; Portatubos de ensayo.
- B04B5/04 B […] › B04 APARATOS O MAQUINAS CENTRIFUGAS UTILIZADAS PARA LOS PROCEDIMIENTOS FISICOS O QUIMICOS. › B04B CENTRIFUGADORES (tambores de gran velocidad para la desintegración B02C 19/11). › B04B 5/00 Otros centrifugadores. › Aparatos de cámara radial para separar mezclas esencialmente líquidos, p. ej. butirómetros.
- G01N35/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › Análisis automático no limitado a procedimientos o a materiales tratados en uno sólo de los grupos G01N 1/00 - G01N 33/00; Manipulación de materiales a este efecto.
- G01N35/04 G01N […] › G01N 35/00 Análisis automático no limitado a procedimientos o a materiales tratados en uno sólo de los grupos G01N 1/00 - G01N 33/00; Manipulación de materiales a este efecto. › Detalles del transportador.
PDF original: ES-2553719_T3.pdf
Patentes similares o relacionadas:
 Dispositivo de análisis y método para examinar una muestra, del 29 de Julio de 2020, de BOEHRINGER INGELHEIM VETMEDICA GMBH: Dispositivo de análisis para probar una muestra (P) biológica particular por medio de un cartucho que puede ser recibido,
comprendiendo el dispositivo […]
Dispositivo de análisis y método para examinar una muestra, del 29 de Julio de 2020, de BOEHRINGER INGELHEIM VETMEDICA GMBH: Dispositivo de análisis para probar una muestra (P) biológica particular por medio de un cartucho que puede ser recibido,
comprendiendo el dispositivo […]
Analizador y método de análisis que usan un recipiente de puntas con cubierta, del 1 de Julio de 2020, de SYSMEX CORPORATION: Analizador que comprende: unos medios para montar un recipiente de líquido; una pluralidad de medios para montar, cada uno, uno de una pluralidad […]
Analizador de prueba que comprende un punzón de aluminio desechable para elementos de prueba de inmunohematología, del 17 de Junio de 2020, de ORTHO-CLINICAL DIAGNOSTICS, INC.: Un método para reducir la contaminación cruzada en un aparato de prueba de inmunodiagnóstico, el método que comprende las etapas de: estimar […]
Recipiente de reactivo para almacenar un reactivo líquido, aparato para fabricar una parte inferior de un recipiente de reactivo y un método para fabricar una parte inferior de un recipiente de reactivo, del 3 de Junio de 2020, de F. HOFFMANN-LA ROCHE AG: Un recipiente de reactivo para un instrumento analítico, en donde el recipiente de reactivo está configurado para almacenar un reactivo líquido, […]
Procedimiento y sistema de medición para el monitoreo del desgaste de contactos deslizantes, del 27 de Mayo de 2020, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Sistema de medición para la medición de una muestra en un dispositivo de análisis automático ; en donde el sistema de medición comprende […]
Portarrecipientes universal, del 6 de Mayo de 2020, de BECTON, DICKINSON AND COMPANY: Portarrecipientes universal que comprende: una placa de base ; un par de estructuras de soporte (104a, 104b) acopladas a la placa de base por medio […]
 Dispositivo totalmente automático para la detección y análisis de sangre fecal oculta, del 29 de Abril de 2020, de W.H.P.M. Bioresearch and Technology Co., Ltd: Un analizador totalmente automático para la detección de sangre fecal oculta utilizado para detectar una caja de muestra , que comprende un manguito transparente […]
Dispositivo totalmente automático para la detección y análisis de sangre fecal oculta, del 29 de Abril de 2020, de W.H.P.M. Bioresearch and Technology Co., Ltd: Un analizador totalmente automático para la detección de sangre fecal oculta utilizado para detectar una caja de muestra , que comprende un manguito transparente […]
Dispensador de tubos de dos pisos, del 1 de Abril de 2020, de TECHNO MEDICA CO., LTD: Dispensador de tubos de dos pisos (A, B), que comprende: a) Una pluralidad de dispositivos de almacenamiento de tubos de muestras sanguíneas independientes […]