Procedimiento y dispositivo para seleccionar partículas.
Procedimiento para seleccionar partículas (1), en el que en una sucesión temporal y/o espacial se seleccionan partículas en al menos dos fases de clasificación según su geometría de partícula,
caracterizado por que
para la selección de las partículas (1) según su parámetro de planitud (relación anchura/grosor) durante la primera fase se realiza una clasificación de las partículas según una extensión de partícula intermedia (b), y durante la segunda fase se realiza una clasificación de las partículas según una extensión de partícula mínima (c).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09014497.
Solicitante: Technische Universitat Bergakademie Freiberg.
Nacionalidad solicitante: Alemania.
Dirección: Akademiestrasse 6 09599 Freiberg ALEMANIA.
Inventor/es: STEUER, MARTIN, UNLAND,GEORG, FOLGNER,DR. THOMAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B07B1/28 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B07 SEPARACION DE SOLIDOS; CLASIFICACION. › B07B SEPARACION DE DIFERENTES SOLIDOS ENTRE SI POR CRIBADO, TAMIZADO, CERNIDO O POR MEDIO DE CORRIENTES DE GAS; SEPARACION POR OTROS METODOS SECOS DE MATERIALES A GRANEL, p. ej. PARA ARTÍCULOS SUELTOS ADECUADOS PARA SER MANIPULADOS COMO MATERIAL A GRANEL (procedimientos de separación por vía húmeda, clasificación por procedimientos utilizando materiales que fluyen como los líquidos B03; combinaciones de aparatos de separación por vía seca con aparatos por vía húmeda B03B; mediante la utilización de líquido B03B, B03D; clasificación por separación magnética o electrostática de materiales sólidos a partir de materiales sólidos o de fluidos, separación por campos eléctricos de alta tensión B03C; aparatos centrífugos o de vértice para la realización de procedimientos físicos B04; clasificación manual, clasificación postal, clasificación por sistemas de agujas o por otros sistemas que funcionen en respuesta a la detección o a la medida de las características de los objetos o de las muestras del material B07C). › B07B 1/00 Cribado, tamizado o clasificación de materiales sólidos por medio de rejillas, parrillas o sistemas análogos. › Tamices móviles no previstos en otro lugar, p. ej. oscilantes, con movimiento alternativo, balanceantes, basculantes o vacilantes.
- B07B13/00 B07B […] › Clasificación o selección de materiales sólidos por vía seca no prevista en otro lugar; Clasificación distinta que la hecha por dispositivos controlados indirectamente.
PDF original: ES-2449484_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo para seleccionar partículas.
La invención se refiere a un procedimiento y a un dispositivo para seleccionar partículas.
En la técnica de tratamiento así como para la fabricación de productos mediante el empleo de partículas, el uso de materiales particulados seleccionados desempeña un papel cada vez más importante para conseguir una alta eficacia así como para el cumplimiento de los requisitos de calidad. Además, mediante la puesta a disposición de productos particulados seleccionados pueden implementarse mayores expectativas de calidad y precio. Así, la gravilla y grava seleccionada, de precio alto, puede llevar en la industria de la construcción así como en la construcción de carreteras a una vida útil considerablemente mayor y a propiedades de producto mejoradas.
Por tanto por el documento DE 10 2006 001 043 A1 se conoce ya un procedimiento para la generación de gravilla y grava, en el que granos cúbicos, cuyo porcentaje de grava y gravilla debe ascender a al menos el 50%, no se trituran adicionalmente en un proceso de tratamiento posterior, tal como un proceso de machacado. Más bien, preferiblemente sólo deben procesarse granos no cúbicos en fases de machacado adicionales, que sirven para la cubificación, para dar granos cúbicos. Para la selección se utilizan máquinas de selección de forma de grano, que se basan o bien en principios ópticos o bien en el distinto comportamiento de equilibrio de los granos cúbicos y no cúbicos.
Por el documento US 1 955 032, que se considera el estado de la técnica más próximo para el objeto de la reivindicación 1, se conocen un procedimiento y un dispositivo para la selección de partículas según su forma de partícula en una sucesión espacial y temporal con dos fases de clasificación. En este caso en la primera fase se realiza una clasificación de la partícula según su extensión de partícula máxima.
Además por el documento US 4 254 878 se conocen un procedimiento y un dispositivo para la selección de forma de grano. En este caso se hace uso de un clasificador rotativo (figura 2) o de un clasificador de cubierta plana (figura 3) .
En este caso se clasifican igualmente en primer lugar según la extensión máxima de las partículas que no son más largas que el doble de la longitud de abertura de las aberturas pasantes.
Mediante la invención van a crearse, para una aplicación amplia, multisectorial, un procedimiento y un dispositivo para seleccionar partículas, que permiten de manera fiable y aplicable industrialmente poner a disposición partículas, tales como, por ejemplo, gravilla o grava u otros materiales de carga, en una selección específica de la forma de grano.
Este objetivo se soluciona según la invención mediante un procedimiento con las características de la reivindicación 1.
Por tanto un aspecto esencial de la presente invención consiste en seleccionar partículas según su forma de grano y de este modo separar partículas con distinta forma de grano unas de otras para así por ejemplo distinguir partículas según su planitud (partículas con una relación anchura/grosor determinada) .
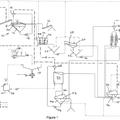
En el marco de la presente invención se emplean los conceptos clasificación y selección. Por clasificación se entiende aquí la separación según una característica geométrica de la macroestructura de partícula (por ejemplo las dimensiones principales, figura 1) . Una selección según la forma de grano se describe por la clasificación en serie según al menos dos características geométricas de la macroestructura de partícula (clasificación en serie según al menos dos dimensiones principales) , pudiendo realizarse una clasificación en serie doble según el parámetro de planitud.
Preferiblemente antes de una clasificación según una característica geométrica de una macroestructura de partícula (dimensión principal) se produce una clasificación según una característica geométrica adicional de una macroestructura de partícula (dimensión principal) temporal y/o espacialmente.
De este modo puede separarse una fracción según la planitud con un valor límite determinado para esta forma de grano.
Formas de realización preferidas del procedimiento según la invención, también por lo que respecta a la configuración de las aberturas pasantes en función del objetivo de clasificación, son objeto de las reivindicaciones dependientes adicionales.
Preferiblemente puede implementarse una clasificación bidimensional (que se realiza en el plano de clasificación) o también tridimensional empleando estructuras de criba espaciales tridimensionales.
En el marco del procedimiento según la invención se realiza una clasificación en serie (selección según la forma de grano) en al menos dos operaciones de clasificación, preferiblemente sucesivas temporal y/o espacialmente, teniendo en cuenta en cada caso una de tres dimensiones principales (longitud a, anchura b, grosor c) de las partículas.
Según una forma de realización preferida de la invención, el primer y el segundo dispositivo de clasificación pueden formarse mediante un primer y un segundo dispositivo de cribado, que están dispuestos preferiblemente en una carcasa común o configurados integralmente en un plano de clasificación.
Preferiblemente se usan el movimiento de partícula en forma de índice de cribado y la correspondiente extensión de partícula (por ejemplo longitud de partícula, anchura de partícula y grosor de partícula) según los cuales ha de clasificarse, como parámetros para la elección de geometrías adecuadas de las aberturas pasantes de los dispositivos de cribado.
Mediante una clasificación en serie doble, es decir, selección de forma de grano según el tamaño de partícula en al menos dos direcciones axiales principales de la partícula, que son esencialmente perpendiculares entre sí (longitud, anchura, grosor) , es posible de manera sorprendentemente sencilla seleccionar partículas en cuanto a su acicularidad (relación de la extensión de partícula máxima (dimensión longitudinal) con respecto a la dimensión principal intermedia máxima (anchura de partícula) ) o según su cubicidad o redondez ( (relación de la extensión de partícula máxima (dimensión longitudinal) con respecto a la extensión de partícula mínima (grosor) ) o en cuanto a su planitud (planicidad) (relación de la dimensión principal intermedia (anchura) con respecto a la dimensión principal más pequeña (grosor) ) , es decir, según en cada caso una magnitud geométrica de la partícula. Preferiblemente los dispositivos de clasificación son dispositivos de cribado como por ejemplo osciladores circulares, elípticos, lineales o planos, es decir, cribas oscilantes con la geometría de movimiento anteriormente mencionada o una superficie de criba dispuesta inclinada y preferiblemente estacionaria como plano de clasificación, a través de las que se conducen las partículas.
Para una clasificación según la extensión de partícula máxima, el dispositivo de clasificación, preferiblemente dispositivo de cribado, presenta una clasificación por medio de orificio redondo, orificio cuadrado, orificio oblongo (clasificación bidimensional) , orificio cuadrado en 3D u orificio rectangular en 3D (“en 3D”= clasificación tridimensional) predefinido. En cuanto a una extensión de partícula intermedia esencialmente perpendicular a la extensión de partícula anteriormente mencionada, el dispositivo de cribado está dotado preferiblemente de aberturas pasantes (orificio redondo u orificio cuadrado) con un diámetro de orificio o un tamaño de malla predefinido, preferiblemente en una configuración como chapa perforada o criba.
Como dispositivo de clasificación para la clasificación de las partículas según la extensión de partícula mínima esencialmente perpendicular a la extensión de partícula máxima e intermedia, preferiblemente está previsto un dispositivo de cribado formado por barras con una distancia entre barras predefinida o un tejido de malla alargada con una distancia de malla predefinida o un fondo de orificios rectangulares en 3D.
Por tanto preferiblemente la clasificación puede realizarse mediante dispositivos de cribado con modo de funcionamiento o plano de clasificación bidimensional aunque también tridimensional.
En el marco de la presente solicitud, por clasificación o clasificación en serie doble se entiende siempre una selección según la forma de grano, que incluye una clasificación temporal y/o espacialmente separada según al menos dos dimensiones geométricas principales de las partículas (longitud máxima, anchura máxima o grosor máximo) .
Mediante la invención puede... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para seleccionar partículas (1) , en el que en una sucesión temporal y/o espacial se seleccionan partículas en al menos dos fases de clasificación según su geometría de partícula, caracterizado por que
para la selección de las partículas (1) según su parámetro de planitud (relación anchura/grosor) durante la primera fase se realiza una clasificación de las partículas según una extensión de partícula intermedia (b) , y durante la segunda fase se realiza una clasificación de las partículas según una extensión de partícula mínima (c) .
2. Procedimiento según la reivindicación 1, caracterizado por que temporal y/o espacialmente antes de una selección según al menos otro de los parámetros de acicularidad (relación longitud/anchura) y/o cubicidad (relación longitud/grosor) se produce una selección según la planitud.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado por que se realiza una selección mediante clasificación bi o tridimensional y en un plano de clasificación oscilante o no oscilante.
4. Procedimiento según la reivindicación 3, caracterizado por que la clasificación se realiza en un plano de clasificación inclinado.
5. Procedimiento según la reivindicación 3 ó 4, caracterizado por que el plano de clasificación presenta aberturas pasantes (3; 4) rectangulares y/o elípticas como geometrías de abertura bidimensionales
6. Procedimiento según la reivindicación 3 ó 4, caracterizado por que el plano de clasificación presenta un orificio cuadrado en 3D, orificio redondo en 3D, orificio elíptico en 3D o un orificio oblongo en 3D como geometrías de abertura tridimensionales, y/o las partículas (1) se conducen en la zona de las aberturas pasantes (3) con geometría de abertura tridimensional a lo largo de un plano inclinado (6) .
7. Procedimiento según la reivindicación 5, caracterizado por que el plano de clasificación presenta aberturas pasantes (3; 4) cuadradas o circulares.
8. Procedimiento según una de las reivindicaciones anteriores 5 a 7, caracterizado por que una abertura pasante (3; 4) está definida por una distancia vertical del plano (6) con respecto a una arista (5) opuesta, que delimita la abertura pasante en el plano de clasificación.
9. Procedimiento según al menos una de las reivindicaciones anteriores 1 a 8, caracterizado por que, a continuación se realiza una clasificación de las partículas (1) según una extensión de partícula máxima (a) y entonces una clasificación de la partícula según la extensión de partícula intermedia (b) esencialmente perpendicular a la extensión de partícula máxima.
10. Procedimiento según la reivindicación 2, caracterizado por que un orden de una selección de las partículas
(1) según su acicularidad y/o cubicidad se selecciona libremente.
11. Procedimiento según al menos una de las reivindicaciones anteriores 1 a 10, caracterizado por que se realiza una clasificación de las partículas (1) en cada caso por cribado, y/o una selección de las partículas
(1) mediante clasificación en al menos un plano de clasificación se realiza con un dispositivo de cribado móvil o inmóvil (2) y geometrías de abertura predefinidas de las aberturas pasantes, y/o la selección mediante clasificación de las partículas (1) se realiza con una criba móvil mediante oscilación circular, elíptica, lineal o plana o con una criba inmóvil con un plano de cribado inclinado, y/o se ajustan una frecuencia de oscilación y/o una amplitud de una criba oscilante de manera específica para las partículas para el ajuste de un movimiento de partículas predefinido.
12. Procedimiento según al menos una de las reivindicaciones anteriores 1 a 11, caracterizado por que se realiza una clasificación de las partículas (1) mediante cribado con aberturas pasantes de geometrías de abertura predefinidas, en particular orificio redondo, orificio cuadrado, orificio oblongo, orificio elíptico, orificio cuadrado en 3D, orificio redondo en 3D, orificio elíptico en 3D u orificio oblongo en 3D, en particular también en combinación entre sí.
13. Procedimiento según la reivindicación 9, caracterizado por que la selección mediante clasificación de las partículas (1) según la extensión de partícula máxima (a) se realiza con un orificio redondo, orificio rectangular, orificio cuadrado, orificio oblongo, orificio elíptico, orificio cuadrado en 3D, orificio circular en 3D, orificio elíptico en 3D o un orificio rectangular en 3D predefinido.
14. Procedimiento según al menos una de las reivindicaciones anteriores 1 a 10, caracterizado por que la selección mediante clasificación de las partículas (1) según la extensión de partícula intermedia (b) esencialmente perpendicular a la extensión de partícula máxima (a) se realiza con un orificio redondo, orificio cuadrado, orificio circular en 3D, orificio cuadrado en 3D predefinido.
15. Procedimiento según al menos una de las reivindicaciones anteriores 2 a 14, caracterizado por que la selección mediante clasificación de las partículas (1) según la extensión de partícula mínima (c) esencialmente perpendicular a la extensión de partícula máxima (a) se realiza con un orificio oblongo, orificio elíptico u orificio rectangular en 3D u orificio elíptico en 3D predefinido.
16. Procedimiento según al menos una de las reivindicaciones anteriores 1 a 15, caracterizado por que a la selección de las partículas (1) le precede un fraccionamiento, y/o se seleccionan partículas (1) de distintas fracciones en paralelo en un dispositivo común mediante clasificación, y/o se realiza un fraccionamiento de las partículas (1) conjuntamente con una primera selección mediante clasificación.
17. Procedimiento según al menos una de las reivindicaciones anteriores 1 a 16, caracterizado por que la selección se realiza en al menos dos fases de clasificación de un dispositivo de selección común (2) , y/o la selección se realiza para ambas fases de clasificación con una chapa perforada, en particular común, o la selección se realiza en al menos dos fases de clasificación con dispositivos de selección separados (2) en carcasas separadas (11) .
18. Procedimiento según al menos una de las reivindicaciones anteriores 1 a 17, caracterizado por que la selección mediante clasificación de las partículas (1) según la extensión de partícula mínima (c) esencialmente perpendicular a la extensión de partícula máxima (a) se realiza con una parrilla de barras con una distancia entre barras predefinida (As) o un tejido de malla alargada con un distancia de malla predefinida (As) como dispositivo de cribado (2) .
19. Dispositivo para realizar el procedimiento según al menos una de las reivindicaciones anteriores 1 a 18, con un primer dispositivo de clasificación para clasificar las partículas (1) según una extensión de partícula intermedia (b) , y un segundo dispositivo de clasificación para clasificar la partícula según una extensión de partícula mínima (c) , esencialmente perpendicular a la extensión de partícula intermedia.
20. Dispositivo según la reivindicación 19, caracterizado por que el primer y/o segundo dispositivo de clasificación es un dispositivo de cribado (2) .
21. Dispositivo según al menos una de las reivindicaciones anteriores 19 a 20, caracterizado por que al menos dos dispositivos de clasificación están realizados integralmente.
22. Dispositivo según la reivindicación 21, caracterizado por que los dispositivos de clasificación están formados por un dispositivo de cribado integrado con aberturas pasantes de distinta geometría de abertura.
23. Dispositivo según al menos una de las reivindicaciones anteriores 19 a 20, caracterizado por que los al menos dos dispositivos de clasificación están realizados separados entre sí.
24. Dispositivo según la reivindicación 23, caracterizado por que los dispositivos de clasificación están formados por dispositivos de cribado separados (2) con aberturas pasantes (13) de geometría de abertura igual o distinta.
25. Dispositivo según al menos una de las reivindicaciones anteriores 19 a 24, caracterizado por que los dispositivos de clasificación como dispositivos de cribado son osciladores circulares, elípticos, lineales o planos o está formado un plano de clasificación estacionario por un dispositivo de cribado dispuesto de manera inclinada, y/o al menos un dispositivo de clasificación es un dispositivo de cribado (2) con aberturas pasantes de geometrías de abertura predefinidas, y/o al menos un dispositivo de clasificación es un dispositivo de cribado (2) configurado como criba oscilante, con una frecuencia de oscilación y/o amplitud que se ajustan de manera específica para el producto para el ajuste de un movimiento de partículas predefinido.
26. Dispositivo según la reivindicación 25, caracterizado por que el dispositivo de cribado (2) del al menos un dispositivo de clasificación presenta aberturas pasantes como orificio redondo, orificio cuadrado, orificio oblongo, orificio elíptico, orificio cuadrado en 3D, orificio redondo en 3D, orificio elíptico en 3D u orificio oblongo en 3D, dado el caso en combinación entre sí.
27. Dispositivo según al menos una de las reivindicaciones anteriores 19 a 26, caracterizado por que el dispositivo de clasificación para la clasificación de la partícula según una extensión de partícula intermedia
(b) presenta un dispositivo de cribado (2) con un patrón de orificios con un orificio redondo, orificio cuadrado, orificio cuadrado en 3D u orificio redondo en 3D predefinido, en particular en combinación entre sí.
28. Dispositivo según al menos una de las reivindicaciones anteriores 19 a 27, caracterizado por que el dispositivo de clasificación para la clasificación de la partícula según la extensión de partícula mínima (c) , esencialmente perpendicular a la máxima es un dispositivo de cribado (2) , que está formado por barras o es un tejido de malla alargada, con una distancia entre barras o distancia de malla predefinida (As) o un fondo de orificios elípticos, fondo de orificios rectangulares en 3D o fondo de orificios elípticos en 3D.
29. Dispositivo según al menos una de las reivindicaciones anteriores 19 a 28, caracterizado por un primer y un segundo dispositivo de clasificación configurados como primer y segundo dispositivo de cribado en una carcasa común y/o con un dispositivo de accionamiento común y/o con un dispositivo de transporte que conduce las partículas a través de los dispositivos de clasificación.
30. Dispositivo según al menos una de las reivindicaciones anteriores 19 a 29, caracterizado por una unidad de fraccionamiento y una unidad de selección en una carcasa común y/o en el que la unidad de fraccionamiento es al mismo tiempo el primer dispositivo de clasificación.
31. Uso de un dispositivo según al menos una de las reivindicaciones 19 a 30, para la realización de un procedimiento según al menos una de las reivindicaciones 1 a 18, o para la selección de carbón para altos hornos o para la selección de grava/gravilla o para el tratamiento de polvos o para la selección de material de carga para reactores de lecho fijo o para la selección de productos de desecho, chatarra, productos de desecho de producción en procesos de reciclado, o para la selección de alimentos y estimulantes, o productos farmacéuticos, cosméticos o cerámicos, según su forma de partícula.
Patentes similares o relacionadas:
Método y aparato para tamizado, del 19 de Febrero de 2020, de Derrick Corporation: Un sistema, incluyendo: una tamizadora vibratoria que tiene un primer elemento de pared , un segundo elemento de pared , una disposición […]
 Procedimiento y aparato para lavar y clasificar arena de sílice para la producción de vidrio, del 29 de Enero de 2020, de CDE Global Limited: Un procedimiento de lavado y clasificación de arena de sílice para la producción de vidrio, que comprende la retirada de desechos y contaminantes relativamente grandes […]
Procedimiento y aparato para lavar y clasificar arena de sílice para la producción de vidrio, del 29 de Enero de 2020, de CDE Global Limited: Un procedimiento de lavado y clasificación de arena de sílice para la producción de vidrio, que comprende la retirada de desechos y contaminantes relativamente grandes […]
Criba vibratoria, del 16 de Enero de 2019, de CDE Global Limited: Una criba vibratoria para clasificar o deshidratar material en partículas que comprende una carcasa sobre la cual se monta una cubierta que […]
Aparato y procedimiento de recogida autolimpiadores, del 20 de Diciembre de 2018, de Nautilus Minerals Pacific Pty Ltd: Un aparato de recogida que opera sobre un fondo marino, comprendiendo el aparato: una pluralidad de discos dispuestos delante de una entrada de una tubería […]
Método y dispositivo para tamizar materiales, tal como agregados y/o tierra, del 15 de Noviembre de 2017, de Allu Finland Oy: Un método tamizar materiales, tal como agregados y/o tierra, dicho método comprende impulsar una plataforma de tamizado con malla mediante energía de maquina sobre ejes […]
Método para separar sólidos de un fluido de perforación cargado de sólidos, del 28 de Junio de 2017, de National Oilwell Varco, L.P: Método para hacer funcionar un colador vibratorio para separar sólidos de un fluido cargado de sólidos, comprendiendo el colador vibratorio una cesta para contener […]
DISPOSITIVO SEPARADOR DE RESIDUOS, del 29 de Septiembre de 2016, de ALONSO PÉREZ, Ricardo: Dispositivo separador de residuos, formadoporpaños de criba, inclinados con movimiento rotativo u oscilatoriopara separar los residuos en fracción fina que cae a […]
Dispositivo separador de residuos, del 27 de Septiembre de 2016, de ALONSO PÉREZ, Ricardo: Dispositivo separador de residuos, formado por paños de criba, inclinados con movimiento rotativo u oscilatorio para separar los residuos […]