PROCEDIMIENTO Y DISPOSITIVO PARA LA GUIA EXACTA DE UNA HERRAMIENTA DE MECANIZACION MEDIANTE UN ROBOT.
Procedimiento para la guía exacta de una herramienta de mecanización a lo largo de una curva,
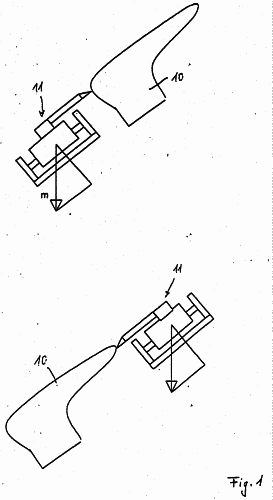
que está cerrada en si dentro del espacio; en este caso, la curva posee dos puntos extremos en uno de tos cuales en la fuerza del peso de la herramienta de mecanización es añadida a la fuerza de apriete mientras que, en el otro punto extremo, la fuerza del peso de la herramienta de mecanización es sustraída de la fuerza de apriete, y esta herramienta se hace pasar -por medio del sistema de control de un robot y con una determinada fuerza de apriete- a lo largo de los contornos de la pieza de trabajo, que ha de ser mecanizada; procedimiento éste que está caracterizado porque la respectiva posición angular de la herramienta dentro del espacio es determinada -con unos intervalos regulares y por medio del sistema de control del robot- a través de un programa de robotización, que se desarrolla en el fondo, y esta posición angular es transmitida, como un valor teórico exigible, hacia un elemento de regulación para aquí sustituir el correspondiente valor real, que está presente, con el fin de regular -como un valor de partida, que ha sido adaptado a la posición angular de la herramienta- el apriete de la herramienta en relación con la pieza de trabajo. Y esto de tal manera que el peso propio de la herramienta sea compensado -durante el apriete de la misma en relación con la pieza de trabajo- durante todo el recorrido de la mecanización; a este efecto, la posición angular de la herramienta es determinada en base a los respectivos datos de los ejes del robot.
Tipo: Resumen de patente/invención.
Solicitante: KLICKNER DESMA SCHUHMASCHINEN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: DESMASTRASSE 3/5,28832 ACHIM.
Inventor/es: LISSEK, ANDREAS, LUHR, JOACHIM, DIPL.-ING.
Fecha de Publicación: .
Fecha Concesión Europea: 21 de Junio de 2006.
Clasificación Internacional de Patentes:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G05B19/44 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › neumáticos.
Clasificación PCT:
Patentes similares o relacionadas:
 Máquina pogo determinante ubicada de forma pasiva, del 26 de Julio de 2013, de THE BOEING COMPANY: Procedimiento para sujetar con exactitud uno o más elementos para fabricar una pieza , que comprende:
- colocar dispositivos de sostenimiento de […]
Máquina pogo determinante ubicada de forma pasiva, del 26 de Julio de 2013, de THE BOEING COMPANY: Procedimiento para sujetar con exactitud uno o más elementos para fabricar una pieza , que comprende:
- colocar dispositivos de sostenimiento de […]
APARATO TEMPORIZADOR NEUMATICO, del 1 de Noviembre de 1981, de TAURUS, S.A.: APARATO TEMPORIZADOR NEUMATICO (CERTIFICADO DE ADICION DE LA PATENTE NUM. 389.958). CONSTA DE UN CILINDRO NEUMATICO FORMADO POR UN CUERPO CON […]
 INSTALACION DE REVESTIMIENTO CON UN CIRCUITO DE REGULACION, del 1 de Diciembre de 2008, de DURR SYSTEMS GMBH: Instalación de revestimiento para el revestimiento en serie de piezas de trabajo con un circuito de regulación para la regulación de la presión de la pintura […]
INSTALACION DE REVESTIMIENTO CON UN CIRCUITO DE REGULACION, del 1 de Diciembre de 2008, de DURR SYSTEMS GMBH: Instalación de revestimiento para el revestimiento en serie de piezas de trabajo con un circuito de regulación para la regulación de la presión de la pintura […]
 SISTEMA POSICIONADOR DE VALVULA, del 16 de Noviembre de 2007, de DRESSER, INC.: Método para controlar una válvula con control neumático que comprende un accionador sensible a señales neumáticas de posicionamiento procedentes de un transductor […]
SISTEMA POSICIONADOR DE VALVULA, del 16 de Noviembre de 2007, de DRESSER, INC.: Método para controlar una válvula con control neumático que comprende un accionador sensible a señales neumáticas de posicionamiento procedentes de un transductor […]
 MECANISMO VALVULAR, del 1 de Febrero de 1963, de ROBERTSHAW - FULTON CONTROLS, COMPANY: Mecanismo valvular, caracterizado porque comprende en combinación, una cabeza lectora que tiene una superficie lectora interrumpida por una pluralidad de medios de paso, una […]
MECANISMO VALVULAR, del 1 de Febrero de 1963, de ROBERTSHAW - FULTON CONTROLS, COMPANY: Mecanismo valvular, caracterizado porque comprende en combinación, una cabeza lectora que tiene una superficie lectora interrumpida por una pluralidad de medios de paso, una […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]