PROCEDIMIENTO Y DISPOSITIVO PARA CONTROLAR Y REGULAR ALMOHADILLAS DE EMBUTICION SERVOELECTRICAS.
Procedimiento para controlar y regular almohadillas de embutición servoeléctricas en prensas conformadoras con un equipo de control NC (59) que regula las posiciones,
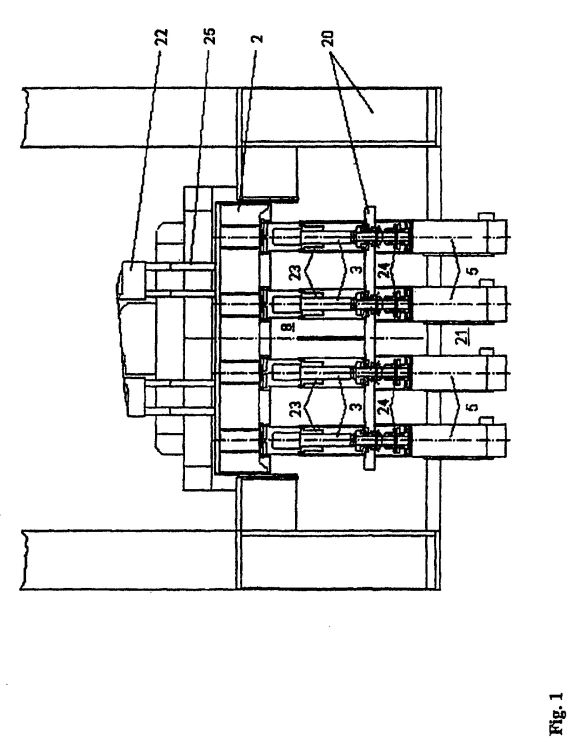
velocidades y fuerzas de los servomotores (5) o cilindros hidráulicos (3a) concebidos como actores de modo que, durante el movimiento del macho hasta el punto de impacto (17) del macho con la almohadilla de embutición (8, 9), se influye sobre la posición (13) de la almohadilla por medio de una regulación de posición que recibe su valor nominal de un disco de levas de posición (12) leído de conformidad con la posición actual de un árbol de guía, en el punto de impacto (17) del macho con la almohadilla de embutición (8, 9) se conmuta a regulación de fuerza por evaluación de una desviación de regulación máxima y a partir del punto de impacto (17) del macho con la almohadilla de embutición (8, 9) hasta el punto de inversión inferior se efectúa una regulación de fuerza con un valor nominal de fuerza leído de la posición del árbol de guía, caracterizado porque durante el movimiento del macho hasta el punto de impacto (17) de este macho con la almohadilla de embutición (8, 9) se influye adicionalmente sobre la posición (13) de la almohadilla para la regulación de posición por medio de una regulación de velocidad que recibe su valor real del codificador (6) por diferenciación respecto del valor real de posición, en el punto de impacto (17) del macho con la almohadilla de embutición (8, 9) se efectúa la conmutación entre regulación de posición y regulación de fuerza o de par de giro por evaluación de las desviación de regulación máxima del regulador de posición (43) o del regulador de velocidad (44), o bien se efectúa dicha conmutación por medio de una limitación de fuerza dinámica permanentemente operativa (54) en combinación con la evolución del disco de levas de posición (12), encontrándose esta evolución por encima de la posición (13) de la almohadilla forzada por el macho en la zona desde el asentamiento del macho sobre la almohadilla de embutición (8, 9) hasta el final del movimiento conjunto con el macho, a partir del punto de impacto (17) del macho con la almohadilla de embutición (8, 9) hasta el movimiento conjunto con el macho se efectúa también, en función de la clase de funcionamiento y hasta más allá del punto de inversión inferior, una regulación de fuerza o de par de giro que recibe su valor nominal de un perfil de valores nominales de fuerza leído de conformidad con la posición actual de la almohadilla (13), del macho (11) o del árbol de guía, y según la clase de funcionamiento preseleccionada de la almohadilla de embutición (8, 9) se efectúa una conmutación a regulación de posición con disco de levas de posición (12) en el punto de inversión inferior (18) o bien al comienzo de la amortiguación de posición final (19) de la carrera de elevación de la almohadilla, y se prosigue cíclicamente el desarrollo del movimiento.
Tipo: Resumen de patente/invención.
Solicitante: MULLER WEINGARTEN AG.
Nacionalidad solicitante: Alemania.
Dirección: SCHUSSENSTRASSE 11,88250 WEINGARTEN.
Inventor/es: DARR, UWE, SCHMIDT, STEFFEN, HEDLER,RAINER.
Fecha de Publicación: .
Fecha Concesión Europea: 10 de Diciembre de 2008.
Clasificación PCT:
- B21D24/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21D TRABAJO MECANICO O TRATAMIENTO DE CHAPAS, TUBOS, BARRAS O PERFILES METALICOS SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DE METALES POR PUNZONADO (trabajo mecánico o tratamiento de alambre B21F). › B21D 24/00 Combinaciones de prensas, o sistemas en relación con las prensas, para el embutido. › Dispositivos que controlan o maniobran los sujetadores independientemente o en relación con las matrices.
- G05B19/18 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Control numérico (NC), es decir, máquinas que funcionan automáticamente, en particular máquinas herramientas, p. ej. en un entorno de fabricación industrial, para efectuar un posicionamiento, un movimiento o acciones coordinadas por medio de datos de un programa en forma numérica (G05B 19/418 tiene prioridad).
Patentes similares o relacionadas:
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Dispositivo limitador de arranque y máquina herramienta, del 9 de Octubre de 2019, de CITIZEN WATCH CO. LTD.: Dispositivo limitador de arranque que comprende: una unidad de prohibición de arranque configurada para prohibir el arranque de un […]
Robot oruga y plataforma de soporte, del 15 de Mayo de 2019, de THE BOEING COMPANY: Aparato que comprende un sistema de oruga y un robot oruga, comprendiendo el robot oruga: un primer sistema de movimiento configurado para […]
Dispositivo de presión giratorio que permite un control eléctrico y método de control para el mismo, del 17 de Abril de 2019, de Rimscience Co., Ltd: Un dispositivo de presión giratorio controlable eléctricamente, que comprende: un medio de presión giratorio para ser introducido en una estructura […]
Procedimiento y dispositivo para la generación de datos de control para la configuración de un flanco dentado a través de mecanización fresada de una pieza de trabajo en una máquina herramienta, del 7 de Febrero de 2019, de DECKEL MAHO PFRONTEN GMBH: Procedimiento para la generación de datos de control para la configuración de un flanco dentado a través de mecanización fresada de una pieza de trabajo en una máquina […]
Dispositivo de orientación para vehículos de transporte accionados eléctricamente y guiados automáticamente en naves industriales, del 4 de Febrero de 2019, de GRENZEBACH MASCHINENBAU GMBH: Dispositivo de orientación para vehículos de transporte accionados eléctricamente y guiados automáticamente en naves industriales, especialmente los así llamados AGV […]
Procedimiento de ajuste del consumo de energía de dos herramientas durante el mecanizado de extremos de secciones de tubo, del 16 de Enero de 2019, de Rattunde AG: Procedimiento de mecanizado de una sección de perfil largo que tiene una longitud real (L1) y un primer y un segundo extremo (3, 3'), donde […]
MÁQUINA PARA EL MECANIZADO POR CONTROL NUMÉRICO DE PANELES DE MADERA, PLÁSTICO Y MATERIALES SIMILARES, DEL TIPO QUE ES SUSCEPTIBLE DE USAR UN SISTEMA DE TRABAJO ¿NESTING¿, del 28 de Septiembre de 2017, de RIERGE, S.A.: 1. Máquina para el mecanizado por control numérico de paneles de madera, plástico y materiales similares, del tipo que es susceptible de usar […]