PROCEDIMIENTO DE VERIFICACIÓN DEL FUNCIONAMIENTO DE UN DETECTOR DE PUNTO MUERTO DE UNA CAJA DE CAMBIOS DE UN VEHÍCULO AUTÓMOVIL.
Procedimiento de verificación del funcionamiento de un detector de punto muerto (Zona PM) de una caja de cambios (1) de un vehículo de tipo automóvil,
en el cual - se dota a la palanca (2) de cambio de velocidad, accionada por un conductor del vehículo, con un detector de efecto Hall, - este detector de efecto Hall comprende un blanco magnético (4) fijado a una extremidad de la palanca, y un imán y un sensor (3) de efecto Hall fijos con respecto a la caja de cambios, - se desplaza la palanca entre la posición de punto muerto y al menos una primera posición fuera del punto muerto (Zona HPM3), correspondiente a una primera relación (R3) de la caja de cambios, - se dota al vehículo con un calculador de control que recibe señales del detector, comprendiendo la función de detección de punto muerto etapas en las cuales, - se mide, con la ayuda del sensor, una evolución del campo magnético entre el blanco y sensor, - se deduce de esta evolución una posición y una orientación de la palanca en el espacio para detectar pasos al punto muerto, caracterizado porque, a la salida de fábrica: - se establece experimentalmente y/o por simulación, para la posición de punto muerto en el equilibrio de la palanca, un primer umbral mínimo (Umbral PMmín) de campo magnético, - se mide, en posición de punto muerto en el equilibrio, un primer valor (V1) del campo magnético que se compara con el primer umbral, - si el primer valor es inferior al primer umbral, se interpreta que esta primera desigualdad es representativa de un mal funcionamiento del detector, y se provoca una reparación, - si el primer valor es superior al primer umbral, se interpreta que esta segunda desigualdad es representativa de un buen funcionamiento del detector
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09167275.
Dirección: ROUTE DE GISY 78140 VELIZY-VILLACOUBLAY FRANCIA.
Inventor/es: Siegfried,Adrien.
Fecha de Publicación: .
Fecha Solicitud PCT: 5 de Agosto de 2009.
Clasificación Internacional de Patentes:
F16H59/70MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16HTRANSMISIONES. › F16H 59/00 Entradas de control de transmisiones que transmiten un movimiento rotativo para cambios de velocidad o para mecanismos de inversión. › función de la relación establecida.
F16H61/12F16H […] › F16H 61/00 Funciones internas de las unidades de control para cambios de velocidad o para mecanismos de inversión de las transmisiones que transmiten un movimiento rotativo. › Detección de un mal funcionamiento o de un mal funcionamiento potencial, p. ej. dispositivo de seguridad positiva (en el control de transmisiones hidrostáticas F16H 61/4192).
Clasificación PCT:
F16H59/04F16H 59/00 […] › Aparatos de selección de la relación.
F16H59/68F16H 59/00 […] › siendo las entradas función del estado de la transmisión.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
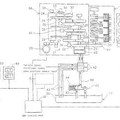
Procedimiento de verificación del funcionamiento de un detector de punto muerto de una caja de cambios de un vehículo automóvil La presente invención se refiere a un procedimiento de verificación del funcionamiento de un detector de punto muerto de una caja de cambios de un vehículo automóvil. El ámbito técnico de la invención es, de modo general, el de las cajas de cambios manuales. De modo más particular, la invención se refiere a un medio que permite, en fábrica, verificar el funcionamiento de un detector de punto muerto de la caja de cambios. Este detector ha sido desarrollado recientemente en el marco de la implantación de una tecnología denominada tecnología Stop and Start (STT) en cajas de cambios manuales. La tecnología STT gestiona la parada del motor cuando el vehículo se detiene durante un período predefinido, por ejemplo delante de un semáforo en rojo, y que arranca automáticamente el motor cuando el conductor pisa de nuevo el pedal de embrague (a voluntad del conductor). Esta tecnología disminuye significativamente el consumo y la contaminación de los vehículos y permite especialmente pasar las normas Euro 5. Por razones de seguridad, es indispensable conocer la posición de la caja de cambios en la parada antes de arrancar el motor de nuevo. En efecto, es necesario que la caja de cambios esté en el punto muerto, es decir sin tener engranada una marcha, para evitar una propulsión hacia delante del vehículo durante un arranque automático. En la figura 1 están representadas esquemáticamente diferentes zonas de una rejilla 1 de caja de cambios. Se distingue una zona central PM de punto muerto y, en este ejemplo, seis zonas HPM1 a HPMR fuera del punto muerto, correspondientes cada una a una relación de la caja de cambios R1, R2, R3, R4, R5 y RR. El conductor acciona una palanca 2 que es móvil en el seno de esta rejilla 1. En el estado de la técnica, se conoce la enseñanza de los documentos siguientes: El documento EP0838001 divulga un arrastre de vehículo que comprende una caja de cambios manual sincronizada a través del control de un mando electrónico y que comprende un sistema de comunicación para vigilar su estado de velocidad (neutro o engranado). El documento EP1003186 divulga un procedimiento de detección de la posición de un conmutador selector, en particular en el caso de un vehículo automóvil que utiliza informaciones facilitadas por el propio conmutador selector y que utiliza igualmente accionadores magnéticos, en particular sondas de Hall. El documento FR2638230 divulga un dispositivo de determinación de la posición de una palanca de cambio de marcha gracias, por ejemplo, a sensores de efecto Hall. El documento FR2818725, considerado como el estado de la técnica más próximo, divulga un procedimiento de adquisición y de análisis de la posición de una palanca de selección en la vía de desplazamiento de esta misma palanca que utiliza al menos dos sensores de posición en el caso de una caja de cambios automatizada. El documento EP 0943430 divulga un procedimiento de calibración de un detector del punto muerto. Típicamente, los detectores de punto muerto están conectados a un calculador de control, y comprenden generalmente un sensor de efecto Hall, tal como el representado esquemáticamente en la figura 2. Un sensor 3 de este tipo comprende un blanco imantado 4 móvil, una sonda 5 de Hall, y un imán 6. Estos elementos están montados en el interior de una caja del sensor 3 y la presencia de una junta asegura la estanqueidad entre el sensor y el cárter de la caja de cambios a la cual está fijado. El blanco 4 está destinado a estar fijado, en un ejemplo, a un vástago de accionamiento (no representado) de las relaciones R1, R2, R3, R4, R5 y RR de la caja de cambios. El vástago es móvil en rotación y en traslación sobre recorridos limitados predefinidos. El vástago es mandado, a través de un varillaje de transmisión, por la palanca 2. El recorrido en traslación del vástago es del orden de algunos centímetros y el recorrido en rotación total es en general aproximadamente 40º. La sonda 5 de Hall es apta para medir un campo magnético para determinar la posición y la orientación del blanco 4 en el espacio y para deducir de éstas la posición de la palanca y el estado de la caja de cambios. Un ejemplo de señal emitida por este tipo de sensor 3 está representado gráficamente en la figura 3. En este gráfico, se define en abscisas una posición relativa del blanco 4, y en ordenadas, el campo magnético medido por el sensor 3. La posición relativa del blanco 4 está expresada aquí en grados. La unidad de campo magnético en el sistema internacional es el Tesla (T). 2 Se constata que por encima de un nivel, recta 7, de campo magnético, el calculador de control considera que la caja de cambios está en punto muerto, en Zona 9 PM. Por debajo de este nivel 7 de campo magnético, el calculador de control considera que la caja de cambios está fuera del punto muerto, en zona HPM. Típicamente, la recta 7 está preestablecida en función de ensayos experimentales o de cálculos y simulaciones que tienen en cuenta todas las dispersiones del sistema que hay que controlar. Se distinguen, fuera del punto muerto, una primera zona 8 HPM que corresponde a una primera relación de la caja de cambios, por ejemplo la tercera velocidad R3, y una segunda zona 10 HPM que corresponde a una segunda relación de la caja de cambios, por ejemplo la cuarta velocidad R4. En la práctica, existe una primera zona de transición 11 entre la primera zona 8 HPM y la zona 9 PM, así como una segunda zona de transición 12 entre la segunda zona 10 HPM y la zona 9 PM. La existencia de estas zonas de transición 11 y 12 se explica por la influencia de numerosos fenómenos mecánicos sobre la precisión de las mediciones. Estos diversos fenómenos degradantes se describen más en detalle en lo que sigue de la descripción. Las curvas 13 a 15 revelan los valores de la señal facilitada por tres sensores diferentes en función de la posición de la palanca 2. Las curvas 13 y 14 corresponden a sensores, respectivamente en límite por defecto y por exceso con respecto a una tolerancia aceptable. La primera zona de transición 11 queda así delimitada por una primera intersección 16 de la curva 13 con la recta 7 y por una primera intersección 17 de la cueva 14 con la recta 7. La segunda zona de transición 12 está delimitada por una segunda intersección 18 de la cueva 13 con la recta 7 y por una segunda intersección 19 de la curva 14 con la recta 7. La curva 15, correspondiente a un sensor medio, aparece como más próxima a una curva teórica de campo magnético medida experimentalmente para un sensor ideal. Fallos técnicos o desregulaciones del sensor pueden generar zonas de transición demasiado importantes y por tanto detecciones de punto muerto erróneas. Una de las causas de mal funcionamiento del sensor es el estado en el cual éste es facilitado por el proveedor. Por ejemplo, dos juntas de estanqueidad están montadas en lugar de una sola, o no está montada ninguna junta; su limpieza puede ser insuficiente, éste puede estar mal calibrado, o resultar deteriorado durante las operaciones de manipulación, de atornillamiento. Otra causa de mal funcionamiento de un sensor de este tipo es su montaje en fábrica que puede generar un deterioro de la junta o del conector, una presencia de rebabas, una salida de la junta de su garganta que se coloca en apoyo sobre una cara de apoyo del sensor, una presencia de virutas en el sensor, en el montaje, debida a una falta de limpieza del puesto de trabajo, una mala realización de un escariado del cárter de la caja de cambios, un diámetro no conforme, o también un estado de superficie no conforme. Igualmente, pueden degradar las mediciones realizadas por el sensor, un deterioro del sistema de conexiones durante el atornillamiento del sensor por la punta del destornillador, un pegado de virutas o suciedad o arandela al sensor debido al magnetismo de este último, un deterioro del funcionamiento del sensor por proximidad de un imán o de una zona magnética en el puesto de montaje, una degradación del sensor o de su sistema de conexiones en la manipulación durante su colocación sobre paletas o en el transporte de la caja de cambios. El mal funcionamiento del sensor puede provenir también de la calidad del blanco 4 facilitado por el proveedor. Éste puede presentar rebabas, ser inexistente, estar roto o deteriorado, ser no conforme, por ejemplo sobredimensionado, o estar imantado por la presencia de virutas. El tipo de dedo de paso montado por el proveedor puede también ser de mala calidad. Finalmente, el sensor puede ser deteriorado por el blanco 4, o por un mal posicionamiento radial y axial. De modo más particular, puede haber una holgura axial o angular con el dedo de paso de velocidades. Igualmente, puede haber interacciones... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de verificación del funcionamiento de un detector de punto muerto (Zona PM) de una caja de cambios (1) de un vehículo de tipo automóvil, en el cual - se dota a la palanca (2) de cambio de velocidad, accionada por un conductor del vehículo, con un detector de efecto Hall, - este detector de efecto Hall comprende un blanco magnético (4) fijado a una extremidad de la palanca, y un imán y un sensor (3) de efecto Hall fijos con respecto a la caja de cambios, - se desplaza la palanca entre la posición de punto muerto y al menos una primera posición fuera del punto muerto (Zona HPM3), correspondiente a una primera relación (R3) de la caja de cambios, - se dota al vehículo con un calculador de control que recibe señales del detector, comprendiendo la función de detección de punto muerto etapas en las cuales, - se mide, con la ayuda del sensor, una evolución del campo magnético entre el blanco y sensor, - se deduce de esta evolución una posición y una orientación de la palanca en el espacio para detectar pasos al punto muerto, caracterizado porque, a la salida de fábrica: - se establece experimentalmente y/o por simulación, para la posición de punto muerto en el equilibrio de la palanca, un primer umbral mínimo (Umbral PMmín) de campo magnético, - se mide, en posición de punto muerto en el equilibrio, un primer valor (V1) del campo magnético que se compara con el primer umbral, - si el primer valor es inferior al primer umbral, se interpreta que esta primera desigualdad es representativa de un mal funcionamiento del detector, y se provoca una reparación, - si el primer valor es superior al primer umbral, se interpreta que esta segunda desigualdad es representativa de un buen funcionamiento del detector. 2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque - se establece experimentalmente y/o por simulación, para la primera posición fuera del punto muerto, un segundo umbral máximo (Umbral HPM3máx) de campo magnético, - se mide, en posición fuera de punto muerto, un segundo valor (V2) del campo magnético que se compara con el segundo umbral, - si el segundo valor es superior al segundo umbral, se interpreta que esta tercera desigualdad es representativa de un mal funcionamiento del detector, y se provoca una reparación, - si el segundo valor es inferior al segundo umbral, se interpreta que esta cuarta desigualdad es representativa de un buen funcionamiento del detector. 3. Procedimiento de acuerdo con la reivindicación 2, caracterizado porque - se mide, en posición fuera del punto muerto, el segundo valor al comienzo de engranamiento de la primera marcha. 4. Procedimiento de acuerdo con una de las reivindicaciones 2 a 3, caracterizado porque - se establece experimentalmente y/o por simulación, para una segunda posición fuera del punto muerto (Zona HPM4) correspondiente a una segunda relación (R4) de la caja de cambios, un tercer umbral máximo (Umbral HPM4máx) de campo magnético, - se mide, para esta posición, un tercer valor (V3) de campo magnético que se compara con el tercer umbral, - si el tercer valor es superior al tercer umbral, se interpreta que esta quinta desigualdad es representativa de un mal funcionamiento del detector, y se provoca una reparación, - si el tercer valor es inferior al tercer umbral, se interpreta que esta sexta desigualdad es representativa de un buen funcionamiento del detector. 8 5. Procedimiento de acuerdo con la reivindicación 4, caracterizado porque la primera relación de la caja de cambios corresponde a un primer desplazamiento simple de la palanca para engranar una velocidad, y porque la segunda relación de la caja de cambios corresponde a un segundo desplazamiento simple en dirección opuesta al primero. 6. Procedimiento de acuerdo con una de las reivindicaciones 1 a 5, caracterizado porque se repiten las etapas de establecimiento de umbral máximo, de medición de campo magnético, de comparación con el umbral, y de interpretación para cada una de las otras marchas (RR; R1; R2; R5) que comprende la caja. 9 11
Patentes similares o relacionadas:
Controlador para vehículo y método de control para vehículo, del 10 de Julio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un controlador para un vehículo ,
incluyendo el vehículo un mecanismo de transmisión de variación continua , un mecanismo de transmisión mecánica […]
Sistema de detección de la posición de una caja
de velocidades manual, caja de velocidades y método
de detección de posición de marcha, del 25 de Enero de 2018, de BITRON INDUSTRIE ESPAÑA S.A.: Sistema de detección de la posición de una caja de velocidades de un vehículo que comprende unos medios magnéticos vinculados con un eje de accionamiento […]
Sistema de control de embrague para transmisión, del 2 de Abril de 2013, de HONDA MOTOR CO., LTD.: Un sistema de control de embrague para una transmision que tiene una pluralidad de embragues hidraulicos , incluyendo el sistema de control de embrague :
una […]
Vehículo con una transmisión variable y una unidad para detectar anomalías en el sistema de detección de la velocidad, del 15 de Agosto de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un controlador para un vehículo que tiene:
una rueda de motriz ;
una fuente de motriz para producir una fuerza de giro;
una transmisión continuamente […]
Sensor de posición de una caja de velocidades, caja de velocidades que incluye tal sensor y procedimiento de detección de la posición del punto muerto de una caja de velocidades de un vehículo automóvil que incluye tal sensor, del 6 de Junio de 2012, de SC2N: Sensor de posición de una caja de velocidades de un vehículo automóvil que incluye una sonda capaz decooperar con una diana móvil unida a un elemento de accionamiento […]
Aparato de control para mecanismo de transmisión, del 29 de Marzo de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un aparato de control para un mecanismo de transmisión (20a), comprendiendo el mecanismo de transmisión: un eje de entrada , un eje de salida […]
APARATO DE CONTROL DE TRANSMISIÓN AUTOMÁTICA, del 8 de Marzo de 2011, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Aparato de control de transmisión automática incluyendo: un mecanismo de selección de marcha configurado para seleccionar un par de engranajes de cambio […]
DISPOSITIVO DE CONTROL DE CAMBIO DE MARCHA Y MOTOCICLETA QUE INCLUYE EL MISMO, del 12 de Julio de 2011, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Dispositivo de control de cambio de marcha que puede montarse en una motocicleta y que incluye un cuerpo y un mecanismo de cambio de marcha […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Sistema de control de embrague para transmisión, del 2 de Abril de 2013, de HONDA MOTOR CO., LTD.: Un sistema de control de embrague para una transmision que tiene una pluralidad de embragues hidraulicos , incluyendo el sistema de control de embrague :
una […]
Sistema de control de embrague para transmisión, del 2 de Abril de 2013, de HONDA MOTOR CO., LTD.: Un sistema de control de embrague para una transmision que tiene una pluralidad de embragues hidraulicos , incluyendo el sistema de control de embrague :
una […] Vehículo con una transmisión variable y una unidad para detectar anomalías en el sistema de detección de la velocidad, del 15 de Agosto de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un controlador para un vehículo que tiene:
una rueda de motriz ;
una fuente de motriz para producir una fuerza de giro;
una transmisión continuamente […]
Vehículo con una transmisión variable y una unidad para detectar anomalías en el sistema de detección de la velocidad, del 15 de Agosto de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un controlador para un vehículo que tiene:
una rueda de motriz ;
una fuente de motriz para producir una fuerza de giro;
una transmisión continuamente […]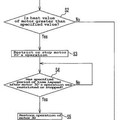 Aparato de control para mecanismo de transmisión, del 29 de Marzo de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un aparato de control para un mecanismo de transmisión (20a), comprendiendo el mecanismo de transmisión: un eje de entrada , un eje de salida […]
Aparato de control para mecanismo de transmisión, del 29 de Marzo de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un aparato de control para un mecanismo de transmisión (20a), comprendiendo el mecanismo de transmisión: un eje de entrada , un eje de salida […] APARATO DE CONTROL DE TRANSMISIÓN AUTOMÁTICA, del 8 de Marzo de 2011, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Aparato de control de transmisión automática incluyendo: un mecanismo de selección de marcha configurado para seleccionar un par de engranajes de cambio […]
APARATO DE CONTROL DE TRANSMISIÓN AUTOMÁTICA, del 8 de Marzo de 2011, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Aparato de control de transmisión automática incluyendo: un mecanismo de selección de marcha configurado para seleccionar un par de engranajes de cambio […]