PROCEDIMIENTO Y SISTEMA RECONFIGURABLE PARA MONITORIZACIÓN DE POSICIÓN DE HAZ DE PARTÍCULAS.
Procedimiento y sistema reconfigurable para monitorización de posición de haz de partículas.
Procedimiento y sistema de monitorización de la posición de un haz de partículas en un acelerador provisto de sensores de RF, donde en un primer paso un circuito analógico convierte las señales RF recibidas por los sensores en información sobre la amplitud y fase de dichas señales y las transforma en señales de baja frecuencia y en un segundo paso un módulo digital calcula la posición del haz a partir de la información sobre amplitud y fase de la señales en un período de muestreo determinado, que no depende de la frecuencia de las señales.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231559.
Solicitante: UNIVERSIDAD DEL PAIS VASCO-EUSKAL HERRIKO UNIBERTSITATEA.
Nacionalidad solicitante: España.
Inventor/es: ETXEBARRIA ECENARRO,VÍCTOR, PORTILLA RUBÍN,Joaquin, JUGO GARCIA,Josu, BELVER FERNANDEZ,Daniel, GARMENDIA LLANOS,Nagore, MUGUIRA URTUBI,Leire, FEUCHTWANGER MORALES,Jorge, ARREDONDO LOPEZ DE GUEREÑU,Iñigo, ECHEVARRIA FERNANDEZ,Pablo, BERMEJO BARRERA,Francisco Javier.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01T5/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01T MEDIDA DE RADIACIONES NUCLEARES O DE RAYOS X (análisis de materiales por radiaciones, espectrometría de masas G01N 23/00; tubos para determinar la presencia, intensidad, densidad o energía de una radiación o de partículas H01J 47/00). › G01T 5/00 Registro de los movimientos o de las trayectorias de partículas (cámaras de centelleo H01J 47/14 ); Tratamiento o análisis de estas trayectorias. › Tratamiento de trayectorias; Análisis de trayectorias.
- H05H7/06 ELECTRICIDAD. › H05 TECNICAS ELECTRICAS NO PREVISTAS EN OTRO LUGAR. › H05H TECNICA DEL PLASMA (tubos de haz iónico H01J 27/00; generadores magnetohidrodinámicos H02K 44/08; producción de rayos X utilizando la generación de un plasma H05G 2/00 ); PRODUCCION DE PARTICULAS ACELERADAS ELECTRICAMENTE CARGADAS O DE NEUTRONES (obtención de neutrones a partir de fuentes radiactivas G21, p. ej. G21B, G21C, G21G ); PRODUCCION O ACELERACION DE HACES MOLECULARES O ATOMICOS NEUTROS (relojes atómicos G04F 5/14; dispositivos que utilizan la emisión estimulada H01S; regulación de la frecuencia por comparación con una frecuencia de referencia determinada por los niveles de energía de moléculas, de átomos o de partículas subatómicas H03L 7/26). › H05H 7/00 Detalles de dispositivos de los tipos cubiertos por los grupos H05H 9/00 - H05H 13/00 (blancos para la producción de reacciones nucleares H05H 6/00). › Disposiciones de dos haces; Disposiciones de multihaces.
Descripción:
Procedimiento y sistema reconfigurable para monitorización de posición de haz de partículas.
CAMPO DE LA INVENCIÓN
La presente invención se encuadra dentro de la física electrónica. En particular, la invención se refiere a un procedimiento y sistema para captar y procesar datos que permiten la monitorización de la posición de un haz de partículas cargadas con alta precisión, utilizable en aceleradores de variada geometría e independiente del tipo de partícula acelerada.
ANTECEDENTES DE LA INVENCIÓN
Los aceleradores de partículas son utilizados en muy variados sectores de actividad, incluyendo el sector científico, el energético y el biomédico. Son estructuras lineales, circulares o mixtas dentro de las cuales partículas cargadas eléctricamente (electrones, protones, iones, etc.) circulan, ganan energía y son guiadas mediante campos electromagnéticos complejos. Naturalmente es esencial que los haces partículas se mantengan en todo momento lejos de las paredes de la conducción (normalmente tubulares) que las contienen, pues en caso contrario se producirían colisiones de las partículas contra dichas paredes y ello daría como resultado pérdidas de haz, activación de elementos y otros efectos indeseados. Por ello, los sistemas de monitorización de posición de haz (beam position monitors) son el principal y más abundante diagnóstico de haz que todo acelerador de partículas necesita, puesto que se debe verificar en todo momento que la posición del haz esté cerca del centro de la estructura de conducción, y en caso de que no sea así, modificar los campos electromagnéticos para corregir dicha posición. Para la toma de datos se utilizan sensores que pueden ser electrodos capacitivos, inductivos, termo resistivos, etc. (US7279882) . Para calcular la posición del haz a partir de las variaciones en parámetros registrados por estos sensores se utilizan circuitos sobre todo digitales, como los descritos en la solicitud EP2131203 A2. Estos sistemas presentan una alta dependencia de la frecuencia de la señal y por ende del tipo de partícula, lo que significa que los tiempos de toma de datos deben ajustarse al tipo de partícula, y ello por tanto da lugar a la necesidad de un sistema y circuitería específica diferente para cada tipo de partícula acelerada.
OBJETO DE LA INVENCIÓN
La invención tiene por objeto proporcionar un procedimiento y sistema más versátiles que eviten la necesidad de empleo de múltiples circuitos de captación diferentes, permitan la detección de múltiples tipos de partículas y simplifiquen el cálculo de la posición del haz. Para ello, propone un procedimiento y sistema de monitorización de la posición de un haz de partículas en un acelerador provisto de sensores de RF, donde en un primer paso un circuito analógico convierte las señales RF recibidas por los sensores en información sobre la amplitud y fase de dichas señales y las transforma en señales de baja frecuencia; en un segundo paso un módulo digital calcula la posición del haz a partir de la información sobre amplitud y fase de la señales en un período de muestreo determinado, que no depende de la frecuencia de las señales.
BREVE DESCRIPCIÓN DE LAS FIGURAS
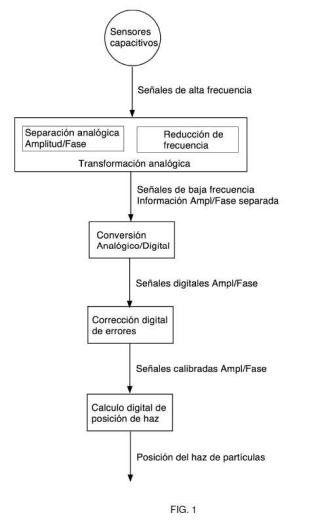
Con objeto de ayudar a una mejor comprensión de las características de la invención de acuerdo con un ejemplo preferente de realización práctica de la misma, se acompaña la siguiente descripción de una figura en donde con carácter ilustrativo se ha representado un diagrama de flujo del procedimiento de la invención.
DESCRIPCIÓN DETALLADA DE LA INVENCIÓN
El sistema de la invención consta de dos partes esenciales, un circuito analógico y un módulo digital.
Circuito analógico:
realiza una transformación analógica convierte a una baja frecuencia las señales RF de los sensores de corriente imagen (sensores capacitivos, inductivos o de cualquier clase) y separa la información de amplitud y fase contenida en dichas señales RF. Este circuito es de banda suficientemente ancha para poder acomodar cualquier tipo de partícula a acelerar.
Módulo digital:
captura las señales analógicas transformadas con un periodo de muestreo más rápido que en el estado de la técnica (independiente de la frecuencia de RF asociada a la partícula) ,
corrige digitalmente los errores del circuito analógico debidos a componentes de continua y al ruido,
tomando estas señales digitales corregidas finalmente calcula la posición del haz de partículas con precisión equivalente a los dispositivos captadores solamente válidos para un tipo de partícula.
El último paso se realiza utilizando la amplitud y la fase de las señales de entrada, cuya información ya ha sido separada por efecto de la transformación analógica. Esto tiene como ventaja adicional que el módulo digital es mucho más simple que el utilizado en el estado de la técnica, pues los cálculos a realizar son más sencillos.
El circuito analógico debe ser de banda suficientemente ancha para acomodar múltiples partículas. El módulo digital corrige los errores analógicos, entre otros los debidos a esta banda ancha.
El muestreo digital de las señales analógicas convertidas a una misma baja frecuencia permite que el período de muestreo no deba depender de la frecuencia maestra de RF del acelerador (que cambia según la partícula acelerada) , sino que baste una frecuencia de muestreo fija suficientemente alta (la misma para todas las partículas) .
Los medios de programa efectúan los cálculos de posición del haz, teniendo en cuenta un solo paso de las partículas (acelerador lineal) o múltiples pasos de revolución (acelerador circular) , de modo iterativo.
Todo el proceso se realiza con alta precisión (del orden de las micras para sensores capacitivos estándar) y con alta flexibilidad, de modo que, al contrario de las soluciones existentes en el mercado, el dispositivo es de uso general, para geometrías diversas del acelerador (lineal, circular, mixto) o tipo de partículas aceleradas (electrones, hadrones, iones pesados, etc.) .
En un ejemplo de realización particular, el acelerador de partículas incluye como sensores un bloque estándar de cuatro electrodos capacitivos o inductivos dispuestos en cruz (derecha-izquierda-arriba-abajo) en las paredes del tubo del acelerador, la entrada del circuito electrónico analógico primario se conecta a dichos sensores mediante cables coaxiales. Dicho circuito analógico incluye componentes electrónicos de radiofrecuencia como amplificadores y demoduladores amplitud-fase. Estos componentes extraen la información sobre la amplitud y la fase de cada señal de cada electrodo de manera independiente para, simultáneamente, reducir la frecuencia de las señales a una misma frecuencia de base. Esto puede conseguirse por ejemplo utilizando dos mezcladores y dos filtros en la demodulación de cada señal de alta frecuencia, que dan como resultado dos señales, una proporcional la evolución de la amplitud de la señal original y otra proporcional a la evolución de la fase de la señal original. Como los cambios de amplitud y fase de las señales originales de los electrodos son mucho más lentos que la propia señal de RF en sí, el resultado a la salida de este circuito electrónico analógico primario son dos señales de baja frecuencia por cada señal de alta frecuencia, que contienen, respectivamente y por separado, la información de evolución de amplitud y la información de evolución de fase de la señal original. A la salida de estos componentes analógicos los conversores analógicos-digitales sirven de interfase con la entrada del circuito digital secundario. El bloque digital está compuesto por un circuito de cómputo basado por ejemplo en procesadores digitales de señal (DSP) o puertas lógicas programables (FPGA) . Mediante comparación de las amplitudes y fases de las señales de los cuatro electrodos recibidas en el bloque digital, el circuito computa numéricamente la posición del haz de partículas. Por ejemplo el cómputo de la posición horizontal del haz puede realizarse programando el circuito DSP o FPGA para restar los valores numéricos de amplitud recibidos del electrodo izquierdo y del derecho, y el cómputo de la posición vertical puede realizarse de forma similar restando los valores numéricos de amplitud de las señales del electrodo de arriba y el de abajo.
Reivindicaciones:
1. Sistema reconfigurable para monitorización de la posición de un haz de partículas compuesto de diversos tipos de partículas en un acelerador provisto de sensores de RF, caracterizado porque comprende un circuito analógico de captación de señales RF con medios para convertir la información de la señal en información sobre la amplitud y fase contenida en dichas señales RF y transformarlas en señales de baja frecuencia y un módulo digital especialmente adaptado para calcular la posición del haz a partir de la información sobre amplitud y fase de la señales en un período de muestreo determinado, que no depende de la frecuencia de las señales.
2. Procedimiento de monitorización de la posición de un haz de partículas en un acelerador provisto de sensores de RF, caracterizado porque en un primer paso un circuito analógico convierte las señales RF recibidas por los sensores en información sobre la amplitud y fase de dichas señales y las transforma en señales de baja frecuencia y en un segundo paso un módulo digital calcula la posición del haz a partir de la información sobre amplitud y fase de la señales en un período de muestreo determinado, que no depende de la frecuencia de las señales.
1.
3. Procedimiento según la reivindicación 2 caracterizado porque en un paso previo al cálculo de la posición se corrigen mediante el módulo digital los errores del circuito analógico debidos a componentes de continua y al ruido.
Patentes similares o relacionadas:
UN METODO DE FORMAR ABERTURAS EN UN CUERPO SOLIDO., del 16 de Junio de 1979, de TERRADEX CORPORATION: Un método de formar aberturas en un cuerpo sólido que comprende las operaciones de someter el cuerpo a una fuente de partículas pesadas cargadas energéticamente, y […]
 UN TAPON-VALVULA DE AGUJA DE PEQUEÑAS DIMENSIONES, del 16 de Mayo de 1971, de COMMISSARIAT A L'ENERGIE ATOMIQUE: Un tapón-válvula de aguja de pequeñas dimensiones destinado a ser adaptado sobre un elemento tubular con vistas a medir el volumen libre en el interior […]
UN TAPON-VALVULA DE AGUJA DE PEQUEÑAS DIMENSIONES, del 16 de Mayo de 1971, de COMMISSARIAT A L'ENERGIE ATOMIQUE: Un tapón-válvula de aguja de pequeñas dimensiones destinado a ser adaptado sobre un elemento tubular con vistas a medir el volumen libre en el interior […]