PROCEDIMIENTO Y SISTEMA PARA DETERMINAR LA POSICIÓN DE UN APARATO MÓVIL CON RESPECTO A UN APARATO ESTACIONARIO, ESPECIALMENTE DE UN ROBOT COLECTOR DE POLVO ACCIONADO POR BATERÍA CON RESPECTO A UN CARGADOR DE BATERÍA.
Procedimiento para determinar la posición y dado el caso de manera derivada de la misma para fijar un trayecto al menos de un aparato móvil,
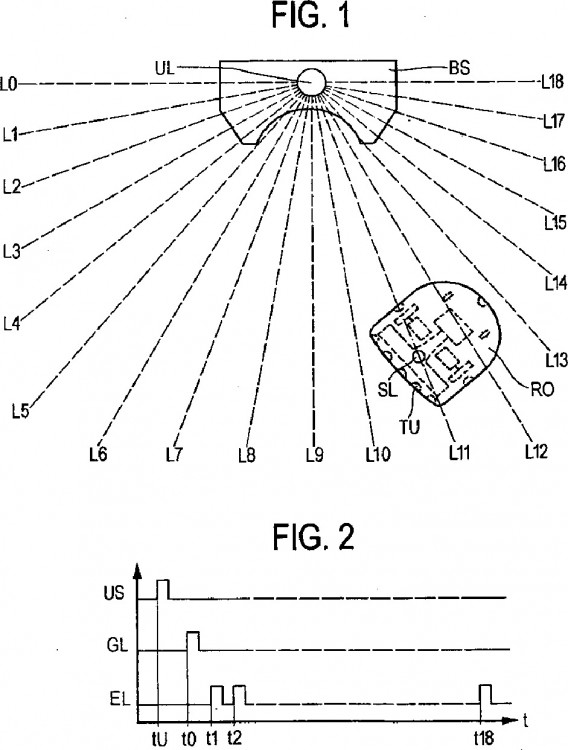
especialmente de un robot colector de polvo accionado por batería autopropulsado, con respecto a un aparato estacionario, especialmente un cargador de batería, con el empleo de señales de emisión que se transmiten por el aparato estacionario con una característica de emisión que gira al menos una vez, y con el empleo de una señal de referencia emitida por el aparato estacionario, con respecto a la que se fija la posición de las señales de emisión mencionadas, conociéndose en el aparato móvil la relación entre la orientación de las señales de emisión individuales y la señal de referencia y determinándose en el aparato móvil su posición con respecto al aparato estacionario a partir de la diferencia de tiempo entre el momento de la recepción de la señal de emisión giratoria con intensidad de campo máxima y de la emisión de la señal de referencia, caracterizado porque por el aparato móvil (RO) se emite en primer lugar una señal de línea libre en forma de una señal de ultrasonidos (US) al aparato estacionario (BS), porque por el aparato estacionario (BS) se emite entonces como señal de referencia una señal luminosa omnidireccional (GL) que se extiende sobre toda la característica de emisión giratoria en la recepción de la respectiva señal de ultrasonidos (US) tras un periodo de tiempo fijado en la recepción de la señal de ultrasonidos (US) mencionada, porque por el aparato estacionario (BS) se emiten a continuación señales luminosas individuales (EL) en una secuencia fijada temporalmente como señales de emisión con la característica de emisión giratoria tras un periodo de tiempo fijado en la emisión de la respectiva señal luminosa omnidireccional (GL) y porque a partir de la diferencia de tiempo entre la emisión de la señal de ultrasonidos (US) por el aparato móvil (RO) y la recepción de la señal luminosa omnidireccional (GL) en el aparato móvil (RO) se determina la distancia del aparato móvil (RO) con respecto al aparato estacionario (BS) y a partir de la diferencia de tiempo entre la señal luminosa omnidireccional (GL) recibida en el aparato móvil (RO) y la señal luminosa individual (por ejemplo con L11) recibida a continuación en el aparato móvil (RO) con intensidad máxima de las señales luminosas individuales (EL) emitidas de manera correspondiente a la característica de emisión giratoria se determina la posición (posición angular) del aparato móvil (RO) con respecto al aparato estacionario (BS) con la consideración de la relación conocida entre la orientación de las señales luminosas individuales (EL) y la señal luminosa omnidireccional (GL)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/059880.
Solicitante: BSH BOSCH UND SIEMENS HAUSGERATE GMBH.
Nacionalidad solicitante: Alemania.
Dirección: CARL-WERY-STRASSE, 34 81739 MÜNCHEN ALEMANIA.
Inventor/es: MAASE, JENS, HIRSCHFELD,Diane, KINAST,Gregor.
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Julio de 2008.
Clasificación Internacional de Patentes:
- G01S3/789 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › que utilizan sistemas de haz giratorio u oscilante, p. ej. que utilizan espejos, prismas.
- G01S5/28 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › mediante la coordinación de líneas de posición de forma diferente, p. ej. hiperbólicas, circulares, elípticas o radiales.
Clasificación PCT:
- G01S3/789 G01S 3/00 […] › que utilizan sistemas de haz giratorio u oscilante, p. ej. que utilizan espejos, prismas.
- G01S5/28 G01S 5/00 […] › mediante la coordinación de líneas de posición de forma diferente, p. ej. hiperbólicas, circulares, elípticas o radiales.
- G05D1/02 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2357680_T3.pdf
Fragmento de la descripción:
La invención se refiere a un procedimiento y un sistema para determinar la posición y dado el caso de manera derivada de la misma para fijar un trayecto de un aparato móvil, especialmente un robot colector de polvo accionado por batería autopropulsado, con respecto a un aparato estacionario, especialmente un cargador de batería, con el empleo de señales de emisión, que se transmiten por el aparato estacionario con una característica de emisión que gira al menos una vez, y con el empleo de una señal de referencia emitida por el aparato estacionario, con respecto a la que se fija la posición de las señales de emisión mencionadas, conociéndose en el aparato móvil la relación entre la orientación de las señales de emisión individuales y la señal de referencia y determinándose en el aparato móvil su posición con respecto al aparato estacionario a partir de la diferencia de tiempo entre el momento de la recepción de la señal de emisión giratoria con intensidad de campo máxima y de la emisión de la señal de referencia. La invención se refiere además a un aparato estacionario y un aparato móvil para un sistema del tipo mencionado anteriormente.
Se conoce ya un procedimiento para determinar la posición de un objeto móvil con el uso de al menos una radioseñal con característica de emisión giratoria de al menos una estación de referencia (DE 102 00 676 A1). Con este procedimiento conocido, el objeto móvil que puede estar formado por ejemplo por vehículos, robots o similares, en caso de detección de la radioseñal verifica la existencia de un incidente de referencia, conociéndose en el objeto móvil la relación entre la orientación de la característica de emisión y el incidente de referencia. El respectivo objeto móvil establece a partir del incidente de referencia la orientación de la característica de emisión y determina a partir de la orientación de la característica de emisión una posición relativa con respecto a la estación de referencia. De este modo se facilita concretamente una determinación de la posición y concretamente la determinación de la posición relativa de un objeto móvil con respecto a al menos una estación de referencia. A este respecto no se prevé sin embargo una determinación de la distancia del respectivo objeto móvil desde la respectiva estación de referencia.
El documento DE 10 2004 014 273 A1 da a conocer un procedimiento para determinar la distancia y la posición angular relativa entre un aparato móvil y un aparato estacionario. La distancia se calcula mediante la diferencia de tiempo entre la recepción de una señal de luz infrarroja y una señal de ultrasonidos en el aparato móvil. La posición angular se determina con ayuda de señales codificadas de manera dependiente de la dirección.
Se conoce además un sistema de determinación de la posición de robot (EP 1 435 555 A2), en el que se prevén un robot y una estación fija que dispone de una primera unidad de emisión que emite una onda acústica, y concretamente de manera especial una onda de ultrasonidos, para establecer una posición del robot, y una segunda unidad de emisión que emite una señal de sincronización formada por una señal de infrarrojo o por una señal de alta frecuencia en caso de emisión de la onda acústica. El robot contiene una primera unidad de recepción con al menos dos sensores acústicos así como una segunda unidad de recepción para la recepción de la señal de sincronización y una unidad de cálculo de la distancia, que calcula una distancia entre la primera unidad de emisión y la primera unidad de recepción con el empleo de una diferencia entre el momento en el que se recibe la señal de sincronización y el momento en el que se recibe la onda acústica. Además, el robot contiene una unidad de cálculo del ángulo de incidencia, con la que se calcula un ángulo de incidencia de la onda acústica en el robot con el empleo de una diferencia entre el momento de recepción de la onda acústica en los al menos dos sensores acústicos que están contenidos en la primera unidad de recepción. Sin embargo, esto requiere una unidad de cálculo de ángulo de incidencia que funcione de manera muy precisa, con la que ha de calcularse el cálculo del ángulo de incidencia mencionado de la onda acústica en los dos sensores acústicos. Además, en caso de este robot conocido, al sistema de determinación de la posición se le asigna la función directriz de la estación fija, dado que ésta emite la señal acústica mencionada y la señal infrarroja mencionada independientemente, o sea sin la acción conjunta del robot.
En relación con el sistema de localización de robot conocido justamente contemplado se conoce además un sistema alternativo en el que el robot presenta un primer emisor, un segundo receptor y una unidad de cálculo de la distancia y en el que la estación fija presenta un primer receptor y un segundo emisor. Por medio del primer emisor del robot se emite una radioseñal que la recibe el primer receptor de la estación fija. A continuación, la respectiva estación fija emite desde su segundo emisor una radioseñal que la recibe el primer receptor del robot. Por medio de la unidad de cálculo de la distancia ha de determinarse entonces la distancia del robot desde la respectiva estación fija a partir de las radioseñales así emitidas y recibidas. También este modo de proceder requiere un gasto de conexión considerable con respecto a la unidad de cálculo de la distancia mencionada, para obtener valores fiables de la distancia entre el robot mencionado y la estación fija mencionada. Sin embargo, un gasto de este tipo se considera con frecuencia como indeseable.
También se conoce ya un sistema de robot que sirve especialmente para la limpieza de suelos con un robot y una estación base o fija (US 5 652 593), en el que la estación fija emite una señal de determinación de la posición al robot para determinar la distancia entre la respectiva estación fija y el robot. Para ello, el robot emite una señal de activación, especialmente en forma de una señal de luz infrarroja u otra señal electromagnética a la estación fija para hacer que ésta emita una señal acústica, y concretamente de manera especial en la zona de frecuencia de ultrasonidos, en la recepción de esta señal. Mediante la diferencia de tiempo entre la emisión de la señal de activación formada especialmente por una señal de luz infrarroja y la recepción de la señal acústica en el robot puede calcularse la distancia entre la estación fija y el robot y dado el caso puede emplearse para fijar el trayecto del respectivo robot con respecto a la estación fija. Sin embargo, para esta fijación se requiere al menos un parámetro adicional, concretamente el conocimiento de la posición del respectivo robot con respecto a la estación fija mencionada. Esta información adicional se obtiene con el sistema de robot conocido contemplado a partir de una senda de exploración que debe fijarse adicionalmente. Sin embargo con ello está asociado de nuevo un gasto adicional que sin duda hace falta evitar por regla general.
Por tanto, la invención se basa en el objetivo de mostrar un modo que con un procedimiento y un sistema del tipo mencionado anteriormente, de manera más fácil que con el estado de la técnica conocido hasta ahora, pueda determinarse la posición y la distancia y dado el caso de manera derivada de la misma la fijación de un trayecto de un aparato móvil, especialmente de un robot colector de polvo accionado por batería autopropulsado con respecto a un aparato estacionario, especialmente con respecto a un cargador de batería.
El objetivo dado a conocer anteriormente se soluciona por un lado con un procedimiento del tipo mencionado anteriormente según la invención porque por el aparato móvil se emite en primer lugar una señal de línea libre en forma de una señal de ultrasonidos al aparato estacionario, porque por el aparato estacionario se emite entonces como señal de referencia una señal luminosa omnidireccional que se extiende sobre toda la característica de emisión giratoria tras un periodo de tiempo fijado en la recepción de la señal de ultrasonidos mencionada, porque por el aparato estacionario se emiten a continuación señales luminosas individuales en una secuencia fijada temporalmente como señales de emisión con la característica de emisión giratoria tras un periodo de tiempo fijado en la emisión de la respectiva señal luminosa omnidireccional y porque a partir de la diferencia de tiempo entre la emisión de la señal de ultrasonidos por el aparato móvil y la recepción de la señal luminosa omnidireccional en el aparato móvil se determina la distancia del aparato móvil con respecto... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar la posición y dado el caso de manera derivada de la misma para fijar un trayecto al menos de un aparato móvil, especialmente de un robot colector de polvo accionado por batería autopropulsado, con respecto a un aparato estacionario, especialmente un cargador de batería, con el empleo de señales de emisión que se transmiten por el aparato estacionario con una característica de emisión que gira al menos una vez, y con el empleo de una señal de referencia emitida por el aparato estacionario, con respecto a la que se fija la posición de las señales de emisión mencionadas, conociéndose en el aparato móvil la relación entre la orientación de las señales de emisión individuales y la señal de referencia y determinándose en el aparato móvil su posición con respecto al aparato estacionario a partir de la diferencia de tiempo entre el momento de la recepción de la señal de emisión giratoria con intensidad de campo máxima y de la emisión de la señal de referencia, caracterizado porque por el aparato móvil (RO) se emite en primer lugar una señal de línea libre en forma de una señal de ultrasonidos (US) al aparato estacionario (BS), porque por el aparato estacionario (BS) se emite entonces como señal de referencia una señal luminosa omnidireccional (GL) que se extiende sobre toda la característica de emisión giratoria en la recepción de la respectiva señal de ultrasonidos (US) tras un periodo de tiempo fijado en la recepción de la señal de ultrasonidos (US) mencionada, porque por el aparato estacionario (BS) se emiten a continuación señales luminosas individuales (EL) en una secuencia fijada temporalmente como señales de emisión con la característica de emisión giratoria tras un periodo de tiempo fijado en la emisión de la respectiva señal luminosa omnidireccional (GL) y porque a partir de la diferencia de tiempo entre la emisión de la señal de ultrasonidos (US) por el aparato móvil (RO) y la recepción de la señal luminosa omnidireccional (GL) en el aparato móvil (RO) se determina la distancia del aparato móvil (RO) con respecto al aparato estacionario (BS) y a partir de la diferencia de tiempo entre la señal luminosa omnidireccional (GL) recibida en el aparato móvil (RO) y la señal luminosa individual (por ejemplo con L11) recibida a continuación en el aparato móvil (RO) con intensidad máxima de las señales luminosas individuales (EL) emitidas de manera correspondiente a la característica de emisión giratoria se determina la posición (posición angular) del aparato móvil (RO) con respecto al aparato estacionario (BS) con la consideración de la relación conocida entre la orientación de las señales luminosas individuales (EL) y la señal luminosa omnidireccional (GL).
2. Procedimiento según la reivindicación 1, caracterizado porque por el aparato estacionario (BS) se emiten como señales luminosas (GL, EL) impulsos de luz infrarroja con duración en cada caso fijada.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque la determinación de la distancia y de la posición del aparato móvil (RO) con respecto al aparato estacionario (BS) se realiza en el aparato móvil (RO).
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado porque por el aparato estacionario (BS) se emiten las señales de emisión (GL, EL) que pueden emitirse por el mismo en cada caso sólo sobre una zona angular fijada de aproximadamente 180º.
5. Sistema con al menos un aparato móvil, especialmente un robot colector de polvo accionado por batería autopropulsado y un aparato estacionario, especialmente un cargador de batería para el respectivo robot colector de polvo accionado por batería, para determinar la posición y dado el caso de manera derivada de la misma para fijar un trayecto del aparato móvil con respecto al aparato estacionario, con el empleo de señales de emisión que se transmiten por el aparato estacionario con una característica de emisión que gira al menos una vez, y con el empleo de una señal de referencia emitida por el aparato estacionario, con respecto a la que se fija la posición de las señales de emisión mencionadas, conociéndose en el aparato móvil la relación entre la orientación de las señales de emisión individuales y la señal de referencia y determinándose en el aparato móvil su posición con respecto al aparato estacionario a partir de la diferencia de tiempo entre el momento de la recepción de la señal de emisión giratoria con intensidad de campo máxima y de la emisión de la señal de referencia, caracterizado porque por medio de al menos un emisor de señal de ultrasonidos (TU) en el aparato móvil (RO) puede emitirse como señal de línea libre una señal de ultrasonidos, porque por al menos un emisor de luz (UL) previsto en el aparato estacionario (BS) puede emitirse como señal de referencia una señal luminosa omnidireccional que se extiende sobre toda la característica de emisión giratoria tras un periodo de tiempo fijado en la recepción de la señal de ultrasonidos mencionada, porque por el al menos un emisor de luz (UL) previsto en el aparato estacionario (BS) pueden emitirse señales luminosas individuales (EL) en una secuencia fijada temporalmente como señales de emisión con la característica de emisión giratoria tras un periodo de tiempo fijado en la emisión de la respectiva señal luminosa omnidireccional (GL) y porque a partir de la diferencia de tiempo entre la emisión de la señal de ultrasonidos (US) por el al menos un emisor de señal de ultrasonidos (TU) del aparato móvil (RO) y la recepción de la señal luminosa omnidireccional (GL) por medio de al menos un elemento receptor de luz (SL) en el aparato móvil (RO) puede determinarse la distancia del aparato móvil (RO) con respecto al aparato estacionario (BS) y a partir de la diferencia de tiempo entre la señal luminosa omnidireccional (GL) recibida en el aparato móvil (RO) y la señal luminosa individual (EL) recibida a continuación en el aparato móvil (RO) por medio del al menos un elemento receptor de luz (LS) con intensidad máxima de las señales luminosas individuales (EL) emitidas de manera correspondiente a la característica de emisión giratoria puede determinarse la posición del aparato móvil (RO) con respecto al aparato estacionario (BS) con la consideración de la relación conocida entre la orientación de las señales luminosas individuales (EL) y la señal luminosa omnidireccional (GL).
6. Sistema según la reivindicación 5, caracterizado porque por el al menos un emisor de luz (UL) previsto en el aparato estacionario (BS) pueden emitirse como señal de referencia (GL) y como señales de emisión (EL) señales infrarrojas en forma de impulsos de luz con duración en cada caso fijada.
7. Aparato estacionario para un sistema según la reivindicación 5 ó 6, caracterizado porque para la emisión de la señal de referencia (GL) y de las señales de emisión (EL) como señales luminosas, especialmente como señales de luz infrarroja presenta una serie de elementos de emisión de luz (UL) dispuestos de manera correspondiente a la característica de emisión giratoria y porque para la recepción de una señal de línea libre en forma de la señal de
5 ultrasonidos (US) presenta al menos un receptor de ultrasonidos (UL).
8. Aparato estacionario según la reivindicación 7, caracterizado porque los elementos de emisión de luz (UL) están formados por diodos de luminiscencia.
9. Aparato móvil para un sistema según la reivindicación 5 ó 6, caracterizado porque presenta al menos un emisor de señal de ultrasonidos (TU) para la emisión de una señal de línea libre en forma de la señal de ultrasonidos al aparato
10 estacionario (BS) y porque presenta al menos un elemento receptor de luz (SL), especialmente un elemento receptor de luz infrarroja para la recepción de la señal luminosa omnidireccional (GL) y las señales luminosas individuales (EL), especialmente en la zona de luz infrarroja por el aparato estacionario (BS).
Patentes similares o relacionadas:
Un sistema de cámara aérea, del 8 de Enero de 2020, de Spookfish Innovations Pty Ltd: Un sistema de cámara aérea que comprende: al menos una cámara dispuesta para capturar una pluralidad de imágenes sucesivas, incluyendo […]
APARATO DE EXPLORACION., del 16 de Octubre de 2004, de THE SECRETARY OF STATE FOR DEFENCE: Un aparato para explorar radiación de entrada procedente de una escena y para generar una radiación de salida para formar una imagen en un plano de imagen, que comprende: […]
PROCEDIMIENTO Y DISPOSITIVO DE DETECCION DE BLANCOS., del 1 de Abril de 2003, de DYNAMIT NOBEL GMBH EXPLOSIVSTOFF- UND SYSTEMTECHNIK: Procedimiento de detección de blancos para un dispositivo de detección de blancos que presenta un visor y un telémetro que produce un rayo […]
SISTEMA OPTOELECTRONICO DE ADQUISICION DE BLANCO EN CAMPO MUY GRANDE., del 16 de Agosto de 1998, de THOMSON-CSF. SOCIETE ANONYME DE TELECOMMUNICATIONS SAT.: SISTEMA OPTOELECTRONICO DE ADQUISICION DE BLANCO EN CAMPO MUY GRANDE. COMPRENDE UNA OPTICA DE ENFOQUE EN CAYO PLANO FOCAL VA DISPUESTA UNA VARILLA DE FOTODETECTORES […]
PROCEDIMIENTO Y SISTEMA PARA LA DETECCION, EN ESPECIAL, DE FUEGO EN LOS BOSQUES., del 1 de Abril de 1995, de BROWN DE COLSTOUN, FRANCOIS CHAMBARET, JEAN-PAUL CHAMBARET, YVES LE SAIGE DE LA VILLESBRUNNE, ARNAUD MOSCOVICI, JEAN-CLAUDE: EL INVENTO SE REFIERE A UN PROCEDIMIENTO DE DETECCION DE UNA FUENTE DE CALOR EN UNA ZONA VIGILADA. SEGUN ESTE PROCEDIMIENTO, SE DESPLAZA UN DISPOSITIVO DETECTOR INSTALADO […]
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]