Procedimiento y sistema de control para un dispositivo de deslizamiento de un acoplamiento de quinta rueda con detección de la posición angular entre un vehículo tractor y el semirremolque.
Procedimiento para controlar un dispositivo de deslizamiento (1) para un acoplamiento de quinta rueda (3) dispuesto sobre un vehículo tractor (2),
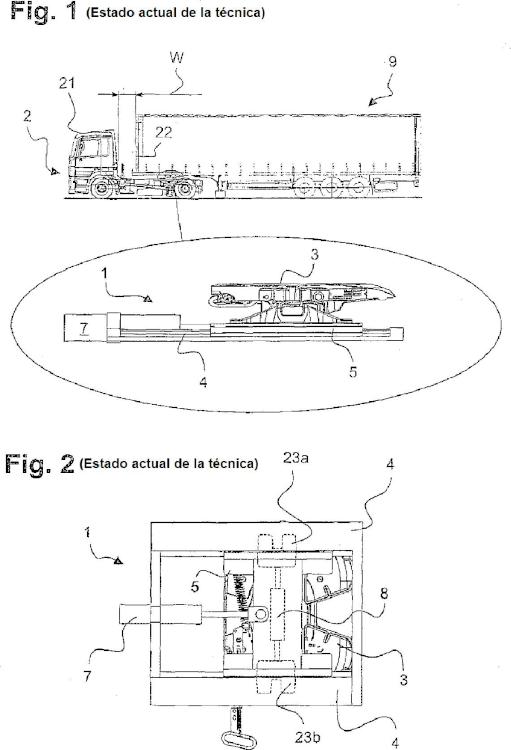
en donde el dispositivo de deslizamiento (1) comprende una infraestructura de soporte con rieles de guía (4) orientados en la dirección de marcha, un carro móvil (5) que soporta el acoplamiento de quinta rueda (3) y que se agarra a los rieles de guía (4), así como un aparato de control (6), al que están conectados una unidad de accionamiento motriz (7) para mover el carro (5) y un elemento de regulación (8) para fijar el carro (5) con respecto a los rieles de guía (4), realizándose en el mismo una medición para determinar la posición de pandeo entre el vehículo tractor (2) y el semirremolque (9), procesándose la señal de medición en el aparato de control (6) para formar una señal de control e iniciándose así el funcionamiento de la unidad de accionamiento motriz (7) y/o del elemento de regulación (8), caracterizado por que en caso de producirse una maniobra de elusión repentina se anula la fijación del carro (5) y el carro (5) es empujado hacia atrás sobre los rieles de guía (4), generándose en el aparato de control (6) a partir de la señal de medición un gradiente angular o gradiente de distancia, o transmitiéndose el mismo al aparato de control (6).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/054664.
Solicitante: JOST-WERKE GMBH..
Nacionalidad solicitante: Alemania.
Dirección: SIEMENSSTRASSE 2 63263 NEU-ISENBURG ALEMANIA.
Inventor/es: ALGUERA GALLEGO, JOSE MANUEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D53/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 53/00 Combinaciones tractor-remolque; Trenes de carretera (dispositivos de acoplado diferentes de los acoplamientos con quinta rueda B60D). › Acoplamientos con quinta rueda de tracción.
PDF original: ES-2502990_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema de control para un dispositivo de deslizamiento de un acoplamiento de quinta rueda con detección de la posición angular entre un vehículo tractor y el semirremolque La presente invención se refiere a un procedimiento para controlar un dispositivo de deslizamiento para un acoplamiento de quinta rueda dispuesto sobre un vehículo tractor de acuerdo con el concepto general de la reivindicación 1, según se desvela en el documento DE 10 2004 046 065. Adicionalmente se protege un sistema de control particularmente apropiado para la realización del procedimiento de acuerdo con la invención para un dispositivo de deslizamiento.
Otro dispositivo de deslizamiento se conoce, por ejemplo, por el documento DE 10 2005 060 124 A1. Por medio de una unidad de accionamiento motriz, un carro con el acoplamiento de quinta rueda colocado encima del mismo puede ser desplazado a lo largo del eje longitudinal del vehículo sobre dos rieles de guía paralelos y fijado en una posición predeterminada. Durante la marcha rápida en autovía sin curvas importantes, el acoplamiento de quinta rueda debería desplazarse lo más cerca posible a la cabina del conductor, a fin de mantener tan pequeño como sea posible el intersticio entre la cabina del conductor y la parte frontal del semirremolque, reduciendo así a un mínimo la formación de turbulencias en esta zona. De acuerdo con el documento conocido, el aparato de control del dispositivo de deslizamiento se conecta al aparato de control del vehículo, de tal manera que se pueden obtener informaciones relacionadas con la velocidad del vehículo y, por lo tanto, se puede ajustar el intersticio entre el vehículo tractor y el semirremolque durante la operación normal. Sin embargo, de esto se deriva el problema de que el semirremolque llevado a una posición lo más próxima posible a la cabina del conductor al transitar por curvas cerradas no puede girar en torno a la cabina del conductor, sin que las esquinas del semirremolque choquen contra la cabina del conductor. Este problema también existiría en caso de un frenado de emergencia, es decir, un frenado a fondo repentino sin maniobras de viraje, que sería reconocido a través de una señal de frenado recibida por el aparato de control y que desencadena un movimiento de retroceso del carro extremadamente rápido para aumentar la medida del intersticio.
Otro estado actual de la técnica se desvela en el documento DE 10 2004 045 662 A1 con un dispositivo de deslizamiento, cuya posición del carro es registrada por un sensor de posición. La señal del sensor de posición se transmite a un dispositivo de control que en caso de existir un intersticio demasiado pequeña entre la cabina del conductor y la parte frontal del semirremolque también puede activar, dado el caso, la unidad de accionamiento del dispositivo de deslizamiento y de esa manera mover el carro hacia atrás.
No obstante, en la práctica se ha demostrado que la captación de la señal de frenado y de la velocidad de marcha sirve en todo caso para determinar un frenado de emergencia sin maniobra de desviación subsiguiente. Normalmente, incluso con el acoplamiento de quinta rueda adelantado, para esto todavía es suficiente el intersticio restante entre el vehículo tractor y el semirremolque. Una maniobra de elusión simultánea, que con frecuencia resulta en el choque de una esquina del semirremolque contra la cabina del conductor del vehículo tractor, no se puede detectar con el dispositivo conocido. La determinación de la posición del carro es poco precisa, en particular en el caso de fuertes reacciones de cambio de carga del semirremolque, pero también en el caso de unidades dispuestas en la parte frontal del semirremolque, de tal manera que existe un factor de inseguridad adicional en relación a si el semirremolque podrá pivotar sin colisión alrededor de la parte trasera del vehículo tractor.
Por esta razón, el objetivo de la presente invención consistió en proporcionar un procedimiento y, respectivamente, un sistema de control, mediante el cual se minimizara el riesgo de un choque del semirremolque contra la cabina del conductor del vehículo tractor.
Dicho objetivo se logra de acuerdo con la presente invención a través de un procedimiento conforme a la reivindicación 1, en el cual se lleva a cabo una medición para captar la posición angular relativa entre el vehículo tractor y el semirremolque, procesándose dicha señal de medición en el aparato de control para formar una señal de control, a través de la cual se inicia el funcionamiento de la unidad de accionamiento motriz y/o del elemento de regulación.
El término posición angular relativa se refiere a una posición angular entre el vehículo tractor y el semirremolque con respecto al eje longitudinal del vehículo. En los dispositivos de deslizamiento utilizados con frecuencia, el carro se desliza sobre dos rieles de guía por medio de una unidad de accionamiento motriz, por ejemplo un cilindro hidráulico, y después de alcanzar la posición prevista se fija en ambos lados en los rieles de guía. Para ello, en la mayoría de los casos se usa un elemento de regulación, por ejemplo un cilindro de accionamiento neumático o hidráulico, para mover piezas de bloqueo en dirección hacia los rieles de guía y ponerlas respectivamente en contacto positivo con las mismas. Este enganche del carro en los rieles de guía descarga la unidad de accionamiento motriz sobre todo en el caso de frenados fuertes o colisiones.
En lugar de un enganche de contacto positivo, también es posible dimensionar la unidad de accionamiento motriz con un tamaño suficiente y prescindir de otros elementos de unión positiva adicionales. En esta forma de realización, el elemento de regulación se refiere a una válvula de cierre, mediante la cual se encierra el líquido presente en el
interior del cilindro.
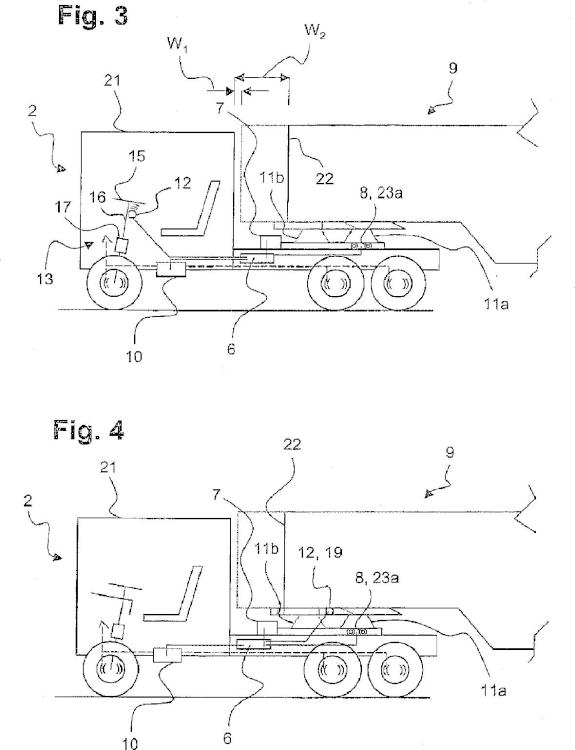
Durante un desplazamiento rápido en la autovía, el dispositivo de deslizamiento mueve el semirremolque a la proximidad de la cabina del conductor, a fin de mantener tan reducida como sea posible la distancia entre la cabina del conductor y el frente del semirremolque. De esta manera se minimizan las turbulencias y por ende también el consumo de combustible. En el caso de una maniobra de evasión repentina, la fijación del carro se anula y el carro se empuja hacia atrás sobre los rieles de guía. A través de un procedimiento de acuerdo con la presente invención se vigila directamente en la posición espacial del semirremolque, de tal manera que si ocurre una aproximación de determinadas partes del semirremolque se inicia un desplazamiento del carro hacia una posición trasera.
En el aparato de control, a partir de la señal de medición, se genera un gradiente angular, o bien, en el caso de una medición de distancia, un gradiente de distancia, que se transmite al aparato de control. Los términos "gradiente angular" y "gradiente de distancia" se utilizan como sinónimos y solamente sirven para subrayar las posibilidades de diferentes registros de valores de medición. El gradiente angular o de distancia toma en cuenta durante la marcha el ángulo de giro del volante o, respectivamente, un cambio en el valor de medición suministrado por el sensor por unidad de tiempo, para ajustar directamente basándose en ello la medida de la separación. Con esta forma de proceder, se prescinde de deducir cuantitativamente la magnitud del ángulo de pandeo y se determina la posición del acoplamiento de quinta rueda sobre los rieles de guía. A través de este paso de procedimiento es posible predeterminar si el giro del volante realizado por el conductor se debe a que se transita por una larga curva o si se debe a una maniobra de elusión repentina. De esta manera se logra en particular un reajuste rápido en caso de emergencia, es decir, en caso de una maniobra de elusión rápida.
Se ha determinado como particularmente favorable que en el aparato de control se genere adicionalmente a la señal de frenado del sistema de frenos del vehículo un gradiente de frenado o transmitir el mismo al aparato de control. El gradiente de frenado sirve como parámetro característico para establecer si el conductor iniciado un frenado intenso o poco intenso. Como parámetro para esto se puede usar, por ejemplo, la presión de frenado o el recorrido del pedal por unidad de tiempo. El recorrido del pedal disponible del freno del vehículo puede ser captado en particular por dos sensores dispuestos al comienzo y al final del recorrido del pedal. En caso de un frenado de emergencia, el conductor pisará rápidamente el pedal del freno para prevenir un accidente. De esto resulta un movimiento rápido del pedal y un gradiente de frenado correspondientemente alto.
Cuando se exceda un gradiente de frenado predeterminable... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para controlar un dispositivo de deslizamiento (1) para un acoplamiento de quinta rueda (3) dispuesto sobre un vehículo tractor (2) , en donde el dispositivo de deslizamiento (1) comprende una infraestructura de soporte con rieles de guía (4) orientados en la dirección de marcha, un carro móvil (5) que soporta el acoplamiento de quinta rueda (3) y que se agarra a los rieles de guía (4) , así como un aparato de control (6) , al que están conectados una unidad de accionamiento motriz (7) para mover el carro (5) y un elemento de regulación (8) para fijar el carro (5) con respecto a los rieles de guía (4) , realizándose en el mismo una medición para determinar la posición de pandeo entre el vehículo tractor (2) y el semirremolque (9) , procesándose la señal de medición en el aparato de control (6) para formar una señal de control e iniciándose así el funcionamiento de la unidad de accionamiento motriz (7) y/o del elemento de regulación (8) , caracterizado por que en caso de producirse una maniobra de elusión repentina se anula la fijación del carro (5) y el carro (5) es empujado hacia atrás sobre los rieles de guía (4) , generándose en el aparato de control (6) a partir de la señal de medición un gradiente angular o gradiente de distancia, o transmitiéndose el mismo al aparato de control (6) .
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado por que en el aparato de control (6) a partir de la señal de frenado del sistema de freno del vehículo (10) se genera un gradiente de frenado, o se procesa un gradiente de frenado del sistema de freno del vehículo.
3. Procedimiento de acuerdo con la reivindicación 2, caracterizado por que el carro (5) es bloqueado por el elemento de regulación (8) cuando se excede un gradiente de frenado predeterminable o si no se alcanza un gradiente angular predeterminable.
4. Procedimiento de acuerdo con las reivindicaciones 2 o 3, caracterizado por que la posición de bloqueo del carro
(5) es anulada por el elemento de regulación (8) cuando se excede de un gradiente de frenado predeterminable y no se alcanza el gradiente angular predeterminable.
5. Procedimiento de acuerdo con la reivindicación 4, caracterizado por que después de anularse la posición de bloqueo, el carro (5) es desplazado a una posición trasera (11 a) por la unidad de accionamiento (7) .
6. Procedimiento de acuerdo con cualquiera de las reivindicaciones 1 a 5, caracterizado por que el aparato de control (6) recibe la velocidad real del vehículo tractor (2) y por debajo de una velocidad mínima predeterminable el carro (5) se mantiene en una posición trasera (11 a) sobre el/los riel (es) de guía (4) .
7. Sistema de control para realizar el procedimiento de acuerdo con cualquiera de las reivindicaciones 1 a 6 con un dispositivo de deslizamiento (1) para un acoplamiento de quinta rueda (3) dispuesto sobre un vehículo tractor (2) , en donde la unidad de deslizamiento (1) comprende una infraestructura de soporte con un riel de guía (4) orientado en la dirección de marcha, un carro móvil (5) que soporta el acoplamiento de quinta rueda (3) y que se agarra a los rieles de guía (4) , así como un aparato de control (6) al que están conectados una unidad de accionamiento motriz
(7) para mover el carro (5) y un elemento de regulación (8) para fijar el carro (5) en relación a los rieles de guía (4) , en donde el aparato de control (6) está conectado a por lo menos un sensor (12) que suministra un valor de medición para registrar la posición de pandeo entre el vehículo tractor (2) y el semirremolque (9) y/o que colabora con el elemento de regulación (8) , caracterizado por que en caso de producirse una maniobra de elusión repentina se anula la fijación del carro (5) y el carro (5) se empuja nuevamente hacia atrás sobre los rieles de guía (4) , calculando el aparato de control (6) un gradiente angular o de distancia a partir del cambio en el valor de medición por unidad de tiempo.
8. Sistema de control de acuerdo con la reivindicación 7, caracterizado por que el sensor (12) está dispuesto en la región del sistema de dirección (13) y registra el ángulo de dirección (14) del vehículo tractor (2) .
9. Sistema de control de acuerdo con las reivindicaciones 7 u 8, caracterizado por que el sensor (12) colabora con el volante (15) y/o con la biela de guía (16) y/o con el mecanismo de dirección (17) .
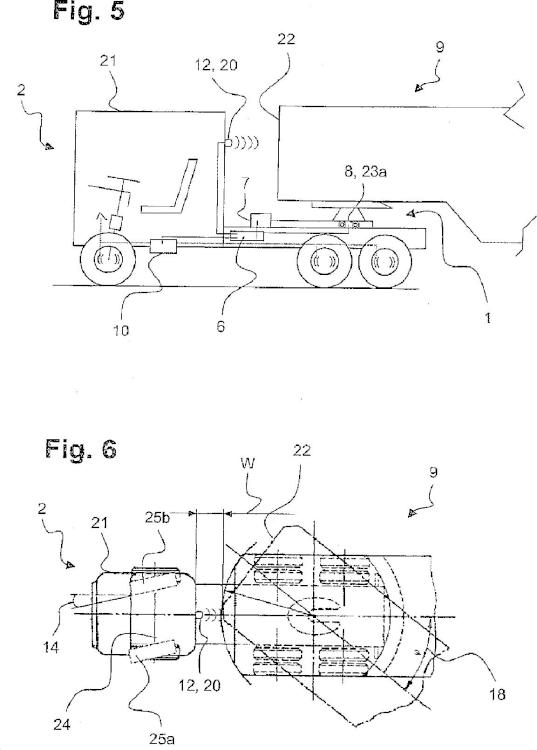
10. Sistema de control de acuerdo con la reivindicación 7, caracterizado por que el sensor (12) registra el ángulo relativo (18) entre el vehículo tractor (2) y el semirremolque (9) .
11. Sistema de control de acuerdo con la reivindicación 10, caracterizado por que el sensor (12) es un transmisor del ángulo de giro (19) .
12. Sistema de control de acuerdo con la reivindicación 7, caracterizado por que el sensor (12) es un sensor de distancia (20) para registrar la anchura del intersticio (W) entre la cabina del conductor (20) y la parte frontal del semirremolque (22) y reconoce una posición de pandeo debido a una disminución de la anchura del intersticio (W) .
13. Sistema de control de acuerdo con cualquiera de las reivindicaciones 7 a 12, caracterizado por que el aparato de control (6) está unido al sistema de freno (10) del vehículo tractor (2) y a partir del sistema de freno (10) recibe un gradiente de frenado o lo genera él mismo.
14. Sistema de control de acuerdo con la reivindicación 13, caracterizado por que el carro (5) es bloqueado por el elemento de regulación (8) cuando se excede un gradiente de frenado predeterminable y no se alcanza un gradiente angular predeterminable.
15. Sistema de control de acuerdo con las reivindicaciones 14 o 15, caracterizado por que la posición de bloqueo del carro (5) se anula cuando se excede un gradiente de frenado predeterminable y se excede un gradiente angular predeterminable.
Patentes similares o relacionadas:
Deslizador activo de reposicionamiento de quinta rueda, del 6 de Noviembre de 2019, de SAF-HOLLAND, INC: Una disposición de ajuste de enganche de quinta rueda para ajustar una posición de una placa de enganche de quinta rueda a lo largo de una […]
Conjunto de enganche de quinta rueda con fijaciones de montaje de montaje directo, del 5 de Junio de 2019, de SAF-HOLLAND, INC: Un conjunto de enganche de quinta rueda, que comprende: al menos una fijación de montaje adaptada para soportar una placa de enganche; un riel del […]
VEHÍCULO URBANO PARA EL TRANSPORTE DE CARGA DE GRAN VOLUMEN Y POCO PESO, del 25 de Abril de 2019, de SALAS PALACIOS, Edgardo Washington: La presente invención se refiere a un vehículo urbano para el transporte de carga de gran volumen y poco peso que se subdivide en dos: una mini cabeza tractora y una semiplataforma […]
DISPOSITIVO DE ENGANCHE RÁPIDO PARA QUINTA RUEDA, del 20 de Septiembre de 2018, de GRAU MAQUINARIA I SERVEI INTEGRAL S.A: 1. Dispositivo de enganche rápido para quinta rueda que, aplicable para su acople a una quinta rueda de un vehículo eléctrico de clase MAA y N1, […]
Kit para la conexión de un semirremolque, tractocamión y semirremolque correspondientes y procedimiento para el reparto de mercancías, del 12 de Abril de 2017, de AUCAR TRAILER S.L: Kit para la conexión de un semirremolque de un conjunto articulado, donde dicho semirremolque comprende un chasis de semirremolque y un punto de enganche […]
Vehículo articulado para el transporte de pasajeros con un sistema de accionamiento mejorado., del 15 de Marzo de 2017, de IVECO FRANCE S.A.: Vehículo articulado para transportar pasajeros, dicho vehículo que comprende al menos: un coche delantero que comprende al menos un eje delantero dirigido […]
DISPOSITIVO PARA PROTEGER Y AMARRAR LA DIRECCIÓN HIDRÁULICA DE UN SEMI-REMOLQUE CON EJE DIRECCIONAL, del 9 de Febrero de 2017, de CIDEGA INOX SL: 1. Dispositivo para proteger y amarrar la dirección hidráulica de un semi-remolque con al menos un eje direccional , dicha dirección hidráulica siendo […]
Combinación de semirremolque y tractor de carretera, del 21 de Diciembre de 2016, de Van De Wetering, Martinus Theodorus: Combinación de semirremolque y tractor de carretera donde el tractor de carretera comprende una quinta rueda y el semirremolque comprende un pivote […]