Procedimiento y sistema para un conmutador de control PID sin perturbaciones.
Un procedimiento para conmutar de un primer algoritmo de control a un segundo algoritmo de control en unsistema de control continuo de procesos,
comprendiendo dicho procedimiento:
ejecutar el primer algoritmo de control;
determinar conmutar del primer algoritmo de control al segundo algoritmo de control;
ejecutar el segundo algoritmo de control; y,
para al menos una primera ejecución del segundo algoritmo de control, ajustar al menos una variable deestado usada en el segundo algoritmo de control, comprendiendo la al menos una variable de estado unavariable de proceso o un valor de referencia de la variable de proceso.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2009/039881.
Solicitante: GE INTELLIGENT PLATFORMS, INC. .
Nacionalidad solicitante: Estados Unidos de América.
Dirección: Route 29 North & Route 606 P.O. Box 8106 Charlottesville, VA 22911 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MCNAB,KEITH GEORGE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05B11/42 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 11/00 Controladores automáticos (G05B 13/00 tiene prioridad). › para obtener una característica a la vez proporcional y dependiente del tiempo, p. ej. P.I., P.I.D.
- G05B9/03 G05B […] › G05B 9/00 Disposiciones de seguridad (G05B 7/00 tiene prioridad; disposiciones de seguridad en sistemas de control por programa G05B 19/048, G05B 19/406; válvulas de seguridad F16K 17/00; circuitos de protección de seguridad en general H02H). › con un bucle de canal múltiple, es decir, sistemas de control redundantes.
PDF original: ES-2399795_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema para un conmutador de control PID sin perturbaciones Antecedentes de la invención La presente invención versa, en general, acerca de un control continuo de procesos (CPC) y, más en particular, acerca de la configuración dinámica de un algoritmo de CPC.
Un algoritmo usado comúnmente para el control continuo de procesos se denomina algoritmo “PID”, refiriéndose el término “PID” a proporcional, integral y derivativo. En los sistemas de control industrial hay muchos tipos diferentes de algoritmos PID. Los tipos más comunes de algoritmos PID son o bien “no interactivos” o bien “interactivos”. Con un algoritmo interactivo, los términos proporcional, integral y derivativo se combinan de una manera en la que los términos interactúan; por ejemplo, los términos son determinados en serie. Con un algoritmo no interactivo, los términos proporcional, integral y derivativo se combinan de una manera en la que los términos interactúan; por ejemplo, los términos son determinados en paralelo.
Cada tipo de algoritmo tiene beneficios en diferentes aplicaciones y en diferentes modos de control. En una aplicación de control puede resultar deseable conmutar una y otra vez de un tipo de algoritmo de control al otro tipo de algoritmo de control para determinar heurísticamente el mejor algoritmo para la aplicación. Además, en el curso de la operación del sistema, pueden surgir diferentes objetivos de control y condiciones operativas que harían deseable conmutar de un tipo de algoritmo de control al otro tipo de algoritmo de control. Un ejemplo sería un control de temperaturas de intervalo dividido en el que la salida PID está dividida en dos intervalos: uno para calentar y otro para enfriar. El tipo deseado de algoritmo para el intervalo de calentamiento puede ser diferente del tipo deseado de algoritmo para el intervalo de enfriamiento. En una aplicación de control continuo de procesos (CPC) , detener el sistema de control para cambiar el algoritmo de control puede costar una cantidad exorbitante de tiempo y de dinero.
El documento US 4.587.470 da a conocer un sistema que incluye un operador PID analógico dotado de un controlador principal y un operador PID digital dotado de un controlador complementario y adaptado para llevar a cabo el cálculo PID equivalente al del operador PID analógico. Se proporciona un sumador/restador que calcula la diferencia, como error de control, entre el componente integral de la salida del operador PID analógico y el componente integral de la salida del operador PID analógico. Se usa un elemento de tiempo muerto de primer orden para evitar que el operador PID analógico haga un seguimiento del estado en circuito abierto cuando opera el relé en la unidad de conmutación.
En una tentativa por evitar tal pérdida de tiempo y dinero, algunos algoritmos de CPC permiten una configuración dinámica, lo que significa conmutar entre tipos de algoritmo PID sin requerir que se detenga el sistema de control. Con tal configuración dinámica, puede haber un cambio abrupto en la salida del algoritmo del sistema de control. Tal cambio abrupto puede hacer que el proceso controlado se vuelva inestable, dando posiblemente como resultado una parada de emergencia y/o la degradación del producto final.
Breve descripción de la invención La presente invención proporciona un procedimiento de conmutación de un primer algoritmo de control a un segundo algoritmo de control en un sistema de control continuo de procesos según, se define en la reivindicación 1, y un controlador para un sistema de control continuo de procesos, según se define en la reivindicación 6.
Breve descripción de los dibujos La Figura 1 es un diagrama esquemático de bloques de un sistema de control continuo de procesos; la Figura 2 es un diagrama de bloques de un algoritmo PID de tipo en serie; la Figura 3 es un diagrama de bloques de un algoritmo PID de tipo en paralelo; la Figura 4 es un diagrama de bloques de los tipos en serie y en paralelo de algoritmos PID y de un conmutador dinámico “sin perturbaciones”; la Figura 5 es un diagrama de bloques de un algoritmo PID de tipo en serie para su uso con el conmutador dinámico sin perturbaciones ilustrado en la Figura 4; y la Figura 6 es un diagrama de bloques de un algoritmo PID de tipo en paralelo para su uso con el conmutador dinámico sin perturbaciones ilustrado en la Figura 4.
Descripción detallada de la invención La siguiente descripción detallada ilustra realizaciones de la invención a título de ejemplo y no a modo de limitación. Se contempla que la invención tenga aplicación general a sistemas de control continuo de procesos y no esté limitada a su implementación en conexión con ningún sistema particular cualquiera de ese tipo.
Tal como se usa en el presente documento, debería entenderse que un elemento o una etapa enumerados en singular y precedidos de las palabras “un” o “una” no excluyen elementos ni etapas plurales, a no ser que tal exclusión se señale de forma explícita. Además, no se busca que se interprete que las referencias a “una
realización” de la presente invención excluyan la existencia de realizaciones adicionales que también incorporen las características enumeradas.
El término procesador, tal como se usa en el presente documento, se refiere a unidades centrales de proceso, microprocesadores, microcontroladores, circuitos de conjuntos reducidos de instrucciones (RISC) , circuitos integrados para aplicaciones específicas (ASIC) , circuitos lógicos y cualquier otro circuito, procesador o controlador capaz de ejecutar las funciones descritas en el presente documento. Tal como se usan en el presente documento, las expresiones “soporte lógico” y “soporte lógico inalterable” son intercambiables e incluyen cualquier programa de ordenador guardado en memoria para su ejecución por un procesador, incluyendo memoria RAM, memoria ROM, memoria EPROM, memoria EEPROM y memoria RAM no volátil (NVRAM) . Los anteriores tipos de memoria son únicamente ejemplares y, por ello, no son limitantes en cuanto a los tipos de memoria utilizables para el almacenamiento de un programa de ordenador.
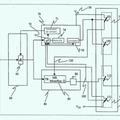
La Figura 1 es un diagrama esquemático de bloques de un sistema 10 de control continuo de procesos. El sistema 10 incluye controladores 12 o procesadores centrales acoplados a un bus 14 de entrada/salida (I/O) y a un bus 16 de campo. El tipo seleccionado de bus 14 de entrada/salida y de bus 16 de campo depende del tipo particular de sistema que esté controlándose, y puede usarse uno cualquiera de numerosos buses de entrada/salida y buses de campo conocidos disponibles en el mercado. El bus 14 de entrada/salida y el bus 16 de campo están acoplados a diversos sensores 18 y controladores locales 20 acoplado al sistema 10 que ha de ser controlado (no mostrado) . De nuevo, los sensores 18 y los controladores locales 20 particulares dependen del tipo particular de sistema que se esté controlando, como es bien conocido en la técnica.
Los controladores centrales 12 también están acoplados a una red 22 de tipo Ethernet. Hay acopladas a la red 22 estaciones 24 de trabajo de diseño para su uso en conexión con el diseño, la creación y la configuración del sistema de mantenimiento. También están acopladas a la red 22 consolas 26 de operarios para que los operarios monitoricen y controlen el proceso. Un subsistema 28 de base de datos, a veces denominado historiador, acoplado a la red 22, gestiona el almacenamiento y la recuperación de los datos del proceso. El subsistema 28 de base de datos también proporciona un control de versiones para las estrategias de control del proceso, incluyendo prestaciones de registros de auditoría.
La Figura 1 ilustra una de numerosas arquitecturas ejemplares para un sistema de control continuo de procesos. Los algoritmos PID actuales no están limitados a un uso en conexión con ningún sistema particular cualquiera. Un ejemplo de un sistema de control conocido y disponible comercialmente es el sistema de procesos Proficy®, disponible comercialmente en la General Electric Company, Fairfield, Connecticut, EE. UU.
En operación, los controladores centrales 12 reciben datos de diversos sensores 18 situados en puntos seleccionados de datos del sistema que ha de controlarse. Los datos recibidos son guardados por el subsistema 28 de gestión de la base de datos. además, tales datos recibidos pueden ser usados por los controladores centrales 12 y los controladores locales 20 para hacer ajustes a los componentes del sistema controlado.
Diversos algoritmos de control son almacenados y ejecutados por los controladores centrales 12. Por ejemplo, los algoritmos de... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para conmutar de un primer algoritmo de control a un segundo algoritmo de control en un sistema de control continuo de procesos, comprendiendo dicho procedimiento:
ejecutar el primer algoritmo de control;
determinar conmutar del primer algoritmo de control al segundo algoritmo de control; ejecutar el segundo algoritmo de control; y, para al menos una primera ejecución del segundo algoritmo de control, ajustar al menos una variable de estado usada en el segundo algoritmo de control, comprendiendo la al menos una variable de estado una variable de proceso o un valor de referencia de la variable de proceso.
2. Un procedimiento según la reivindicación 1 en el que el primer algoritmo de control es un algoritmo PID en paralelo y el segundo algoritmo de control es un algoritmo PID en serie.
3. Un procedimiento según la reivindicación 2 en el que las variables de estado H_SP (s) y H_PV (s) son ajustadas para al menos una primera ejecución del algoritmo PID en serie, siendo:
_ P!∀∃ _ P!∀# Ps,
HSs HSsS!∀KP
y
_ V!∀∃ _ V!∀s PVs,
HPs HP# !∀KP
en las que:
PV (s) es la variable de proceso que ha de controlarse, SP (s) es el valor de referencia, es decir, un valor deseado de la variable de proceso, y KP es la ganancia proporcional.
4. Un procedimiento según la reivindicación 1 en el que el primer algoritmo de control es un algoritmo PID en 20 serie y el segundo algoritmo de control es un algoritmo PID en paralelo.
5. Un procedimiento según la reivindicación 4 en el que el que las variables de estado H_SP (s) y H_PV (s) son ajustadas para al menos una primera ejecución del algoritmo PID en paralelo, siendo:
_ !∀∃ ∋ _ P!∀ Ps (,
HSPs KHSsS!∀
P) ∗
y
_ !∀∃ ∋ _ V!∀ sPs (,
Vs KHP&
HPP) V!∀∗
en las que:
PV (s) es la variable de proceso que ha de controlarse, SP (s) es el valor de referencia, es decir, un valor deseado de la variable de proceso, y KP es la ganancia proporcional.
6. Un controlador para un sistema de control continuo de procesos, comprendiendo dicho controlador un procesador acoplado a una memoria, estando programado dicho procesador para ejecutar algoritmos de control continuo de procesos para generar una salida PID, estando programado dicho controlador, además, para conmutar de un primer algoritmo de control a un segundo algoritmo de control y, para al menos una primera ejecución del segundo algoritmo de control, ajustar al menos una variable de estado usada en dicho segundo algoritmo de control, comprendiendo la al menos una variable de estado una variable de proceso o un valor de referencia de la variable de proceso.
7. Un controlador según la reivindicación 6 en el que el primer algoritmo de control es un algoritmo PID en paralelo y el segundo algoritmo de control es un algoritmo PID en serie.
8. Un controlador según la reivindicación 7 en el que las variables de estado H_SP (s) y H_PV (s) son ajustadas para al menos una primera ejecución del algoritmo PID en serie, siendo:
_ Ps∃ _ s SP
HSHSP# s, KP
!∀ !∀!∀
y
_ Vs∃ _ # V
HPHPVsPs, KP
!∀ !∀!∀
en las que:
PV (s) es la variable de proceso que ha de controlarse, SP (s) es el valor de referencia, es decir, un valor deseado de la variable de proceso, y 5 KP es la ganancia proporcional.
9. Un controlador según la reivindicación 6 en el que el primer algoritmo de control es un algoritmo PID en serie y el segundo algoritmo de control es un algoritmo PID en paralelo.
10. Un controlador según la reivindicación 9 en el que el que las variables de estado H_SP (s) y H_PV (s) son ajustadas para al menos una primera ejecución del algoritmo PID en paralelo, siendo:
_ !∀∃ ∋ _ P!∀ Ps (,
HSPs KHSsS!∀
P) ∗
y
_ Vs KHP∃ P∋ _ & V
HP VsPs (,
!∀ !∀ !∀
) ∗
en las que:
PV (s) es la variable de proceso que ha de controlarse, SP (s) es el valor de referencia, es decir, un valor deseado de la variable de proceso, y KP es la ganancia proporcional.
11. Un sistema (10) de control de procesos para controlar un proceso, comprendiendo dicho sistema:
una pluralidad de sensores (18) configurados para detectar parámetros del proceso que ha de controlarse; una pluralidad de controladores locales (20) configurados para ajustar los parámetros del proceso; y al menos un controlador central (12) según cualquiera de las reivindicaciones 6 a 10 acoplado a dichos sensores y a dichos controladores locales, estando configurado dicho controlador central para ejecutar
algoritmos de control continuo de procesos para determinar ajustes que ha de realizar dicho controlador local con base en datos de dichos sensores.
Patentes similares o relacionadas:
Dispositivo de control redundante y método de sistema de HVDC, del 22 de Julio de 2020, de LSIS Co., Ltd: Un dispositivo de control redundante de un sistema de transmisión de corriente continua de alto voltaje (HVDC), el dispositivo de control redundante […]
Instalación de quemador con un dispositivo de seguridad, del 22 de Enero de 2020, de SIEMENS AKTIENGESELLSCHAFT: Instalación de quemador, en particular sistema de quemador de gas o sistema de quemador de fuel, con un dispositivo de seguridad, dicho dispositivo […]
Sistema de seguridad automatizado de una instalación industrial, del 1 de Enero de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Sistema de seguridad automatizado de una instalación industrial que comprende una pluralidad de sensores destinados a tomar medidas de un proceso industrial, […]
Método y sistema de refrigeración redundante, del 5 de Diciembre de 2019, de Dawes, Warwick Graham Andrew: Un método para implementar un sistema de refrigeración redundante para proporcionar una carga de refrigeración máxima predeterminada para el aire en un espacio acondicionado […]
Procedimiento para monitorear al menos dos sensores redundantes, del 21 de Agosto de 2019, de BAYER AKTIENGESELLSCHAFT: Procedimiento implementado en ordenador para monitorear al menos dos sensores redundantes , que están dispuestos en particular […]
Calculador, conjunto de comunicación que consta de tal calculador, sistema de gestión ferroviaria que consta de tal conjunto y procedimiento de fiabilidad de datos en un calculador, del 18 de Mayo de 2016, de ALSTOM Transport Technologies: Procedimiento de fiabilidad de datos en un calculador , siendo el calculador apto para proporcionar un dato de salida (Ds) a partir […]
 Sistema de control de turbina eólica con votación descentralizada, del 23 de Marzo de 2016, de VESTAS WIND SYSTEMS A/S: Sistema de control con tolerancia a fallos para una turbina eólica que comprende una pluralidad de componentes de turbina eólica controlables, […]
Sistema de control de turbina eólica con votación descentralizada, del 23 de Marzo de 2016, de VESTAS WIND SYSTEMS A/S: Sistema de control con tolerancia a fallos para una turbina eólica que comprende una pluralidad de componentes de turbina eólica controlables, […]
 Dispositivo de seguridad para el control de varios canales de una instalación técnica de seguridad, del 26 de Enero de 2016, de PHOENIX CONTACT GMBH & CO. KG: Dispositivo de seguridad para el control de varios canales de una instalación técnica de seguridad , con una primera instalación de control controlada por […]
Dispositivo de seguridad para el control de varios canales de una instalación técnica de seguridad, del 26 de Enero de 2016, de PHOENIX CONTACT GMBH & CO. KG: Dispositivo de seguridad para el control de varios canales de una instalación técnica de seguridad , con una primera instalación de control controlada por […]