Procedimiento y sistema para calcular una ruta de vuelo.
Un procedimiento para uso en un sistema (6) para calcular una ruta de vuelo (18,
19) entre una primera posición (20) que está representada por la latitud, longitud y altitud y una segunda posición (21) que está representada por la latitud, longitud y altitud, que comprende las etapas de:
- los datos del terreno, incluidos los datos de latitud y longitud con los datos de altitud asociados 5 o similares son almacenados en una base de datos de terreno (1);
- los datos relativos a las amenazas, incluyendo por lo menos los datos relativos a la extensión geográfica de las amenazas, son almacenados en una base de datos de amenazas (2);
que se caracteriza porque la primera posición (20) se elige inicialmente como la posición actual, y porque las siguientes etapas se repiten hasta que se alcanza la segunda posición (21):
- una función de coste J(k) es evaluada para un horizonte de predicción predefinido N a lo largo de los radios en un cono en el espacio tridimensional correspondiente a cada trayectoria de vuelo en un conjunto de trayectorias de vuelo potenciales que están predefinidas en relación con la dirección actual de vuelo, en el que la función de coste J(k) de cada trayectoria de vuelo ensayada se determina como una suma de los costes para un número de posiciones de cálculo a lo largo de la trayectoria de vuelo, en el que la función de coste (J(k)) incluye al menos un subconjunto de los siguientes parámetros:
- un primer parámetro que indica si la trayectoria de vuelo ensayada cruza zonas de amenazas predefinidas;
- un segundo parámetro que indica si la trayectoria de vuelo ensayada pasa demasiado cerca del te20 rreno;
- un tercer parámetro que indica si la trayectoria de vuelo ensayada supera un valor de altitud predefinido:
- un cuarto parámetro que indica si la trayectoria de vuelo ensayada es costosa desde el punto de vista de consumo de combustible;
- un quinto parámetro que indica la distancia a la segunda posición de la ruta;
- una trayectoria de vuelo que produce el valor más ventajoso de la función de coste J(k) se selecciona en base a la posición actual y a la segunda posición (21), en los datos en la base de datos de terreno y en la base de datos de amenazas;
- las coordenadas de la primera posición de cálculo delante del número de posiciones de cálculo a lo largo de la trayectoria de vuelo son registradas para la trayectoria de vuelo seleccionada (10), y
- las coordenadas de la primera posición de cálculo delante del número de posiciones de cálculo a lo largo de la trayectoria de vuelo para la trayectoria de vuelo seleccionada (10) se eligen como la nueva posición actual (11).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2003/000149.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: SJANIC,ZORAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Instrumentos para efectuar cálculos de navegación (G01C 21/24, G01C 21/26 tienen preferencia).
PDF original: ES-2501167_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema para calcular una ruta de vuelo Ã?rea técnica La presente invención se refiere a un procedimiento y a un sistema para calcular una ruta de vuelo para una aeronave entre una primera posición y una segunda posición.
Estado de la técnica En el caso de, por ejemplo, misiones de reconocimiento o de combate, se prepara un plan de la misión normalmente antes del comienzo de la misión. En ese momento, los pilotos planifican sus rutas y las introducen en los ordenadores de su aeronave. La ruta introducida a continuación es mostrada en una unidad de pantalla dispuesta en la aeronave, con lo cual el piloto puede volar a lo largo de la ruta introducida. Si se produce un suceso inesperado durante el vuelo y obliga al piloto a desviarse de la ruta introducida, entonces el piloto normalmente debe intentar volver a la ruta introducida tan pronto como sea posible.
No siempre es factible volver a la ruta introducida después de una maniobra evasiva. Por ejemplo, el retorno podría requerir un desvío tan grande que el aprovisionamiento de combustible no fuese suficiente. También puede ser difícil volver a la ruta a causa de impedimentos que se encuentran en el trayecto, por ejemplo en forma de un radar hostil, terreno muy desigual, etc. Como resultado, existe la necesidad poder volver a planificar una misión mientras que la misión se está llevando a cabo.
El documento US 20010023390 Al desvela que un número de funciones de navegación se llevan a cabo sobre el terreno del espacio de navegación. Se demuestra una realización preferida de la zona peligrosa dinámica definida por la altitud de vuelo. En una realización preferida, un conjunto de nodos de altura de terreno sobre una altitud mínima de vuelo es localizado y agregado. Algoritmos tales como el control de colisiones, límites de zonas montañosas y técnicas de aumento de región son desarrolladas como operaciones básicas de este modelo de terreno. Sin embargo, otra realización preferida con un enfoque gráfico de visibilidad para la selección de la ruta dinámica ha sido adaptado para reducir los requisitos de cálculo en tiempo real. Se han hecho estudios actuales en el que se han desarrollado soluciones de replanificación con lo que una nueva ruta es generada automáticamente durante el vuelo. Sin embargo, estas soluciones estudiadas están dificultadas por el inconveniente de que las nuevas rutas se pueden calcular en sólo dos dimensiones, es decir, se supone que la ruta se debe volar a una altitud constante. Esto implica que estas soluciones no pueden incluir la posibilidad de que se pueda volar por encima de terreno o de amenazas. Como resultado, las rutas replanificadas son característicamente largas y, a su vez, consumidoras de combustible.
Sumario de la invención Uno de los propósitos de la invención es proporcionar un medio mejorado con respecto a la técnica conocida, para calcular una ruta de vuelo entre una primera posición y una segunda posición en la que se toma en cuenta una exposición a amenazas, y que también permite el cálculo de la ruta del vuelo, tanto vertical como horizontalmente.
Esto se ha logrado en una realización por medio de un procedimiento con las características de la reivindicación 1.
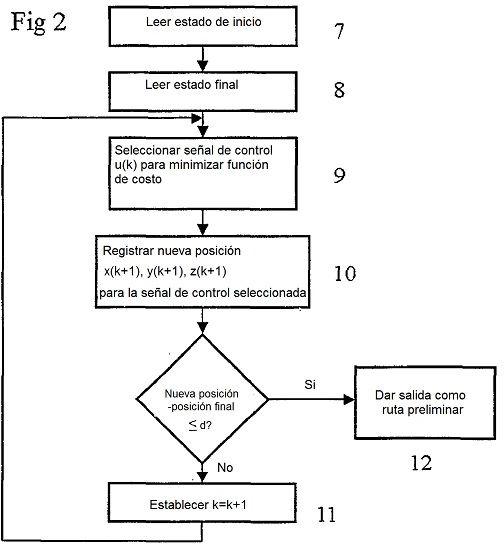
El procedimiento está concebido para su uso en aviones, por ejemplo, aviones de combate, aviones de reconocimiento y aviones no tripulados. El procedimiento es discreto en el tiempo, de manera que la función de coste para cada trayectoria de vuelo ensayada es calculada como una suma de los "costos" de un número de posiciones de cálculo a lo largo de la trayectoria de vuelo. En una realización de la invención sólo la primera posición de cálculo es registrada, después de lo cual se da como nueva posición actual y el procedimiento se repite como se ha descrito más arriba.
De acuerdo con una realización de la invención, las trayectorias de vuelo en el conjunto de trayectorias de vuelo se eligen sobre la base de una secuencia de señales de control asociadas a cada trayectoria de vuelo. Por razones técnicas asociadas con el proceso de cálculo, es ventajoso que las señales desde la segunda a la final en cada secuencia de señales de control se pongan a cero.
La función de coste comprende uno o más de los siguientes parámetros a) un primer parámetro que indica si la trayectoria de vuelo ensayada cruza una zona de amenazas predefinida, b) un segundo parámetro que indica si la trayectoria de vuelo ensayada pasa muy cerca de terreno, c) un tercer parámetro que indica si la trayectoria de vuelo ensayada excede de un valor de altitud predefinido, d) un cuarto parámetro que indica si la trayectoria de vuelo ensayada es costosa desde el punto de vista de consumo de combustible, y e) un quinto parámetro que indica la distancia a la segunda posición de la ruta.
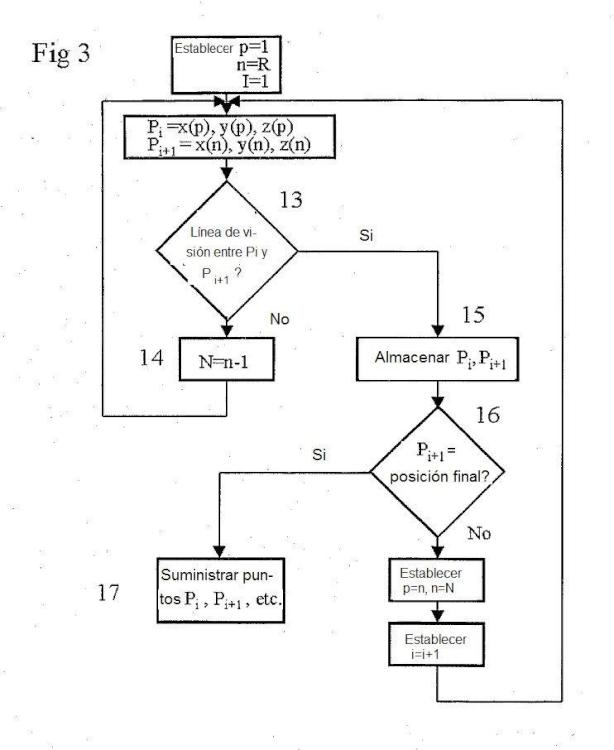
Cuando sea necesario, el procedimiento puede ser complementado con una etapa de refinado en la que puntos registrados situados tan lejos uno del otro como sea posible, pero entre los cuales prevalece la visibilidad sin obstá2 5
culos, están marcados como puntos de interrupción, y en la que se selecciona la ruta como líneas rectas entre estos puntos de interrupción marcados.
La invención comprende también un sistema para realizar el procedimiento anterior. El sistema comprende una base de datos de terreno dispuesta de manera que almacene datos de terreno, incluyendo datos de latitud y de longitud con datos de altitud asociados o similares; una base de datos de amenazas dispuesta de manera que almacene datos relativos a las amenazas que incluyan al menos datos relativos a la extensión geográfica de las amenazas, y una primera unidad de cálculo que está conectada operativamente con la base de datos de terreno y con la base de datos de amenazas y dispuesta de manera que calcule de la ruta entre las posiciones primera y segunda.
En los casos en los que el sistema también está dispuesto para realizar la etapa de refinado, la primera unidad de cálculo, la base de datos de terreno y la base de datos de amenazas están conectadas operativamente a una segunda unidad de cálculo, que está dispuesta de manera que reciba la ruta de vuelo calculada por la primera unidad de cálculo y la refina, después de lo cual los puntos registrados que se encuentran tan lejos el uno del otro como sea posible, pero entre los que prevalece la visibilidad sin obstáculos, están marcados como puntos de interrupción, y de tal manera que la ruta es seleccionada como líneas rectas entre estos puntos de interrupción marcados.
El procedimiento y el sistema de acuerdo con la invención permiten la predicción de una ruta en tres dimensiones que toma una aeronave a un punto final con un riesgo mínimo de entrar en las zonas de amenazas, y a lo largo de la cual la aeronave puede volar tan bajo como sea posible sin riesgo de colisión con el terreno. El procedimiento es también altamente eficiente en cálculo, y se puede planificar una ruta generalmente en el curso de varios segundos.
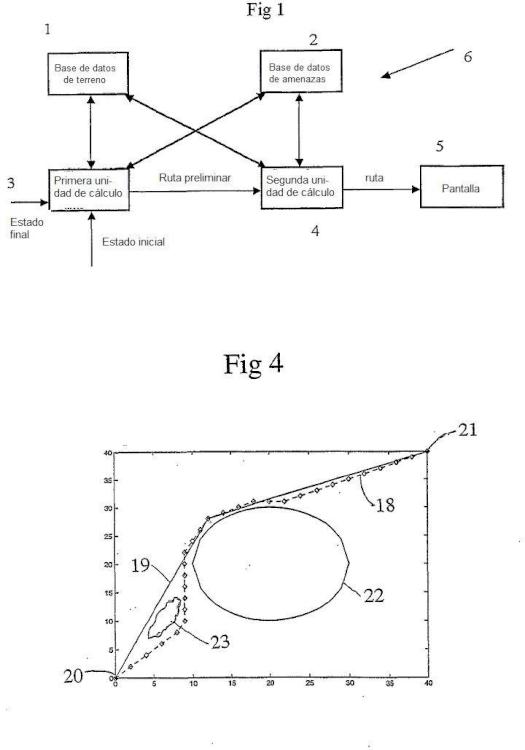
Breve descripción de las figuras La figura 1 muestra un diagrama de bloques que ilustra un ejemplo de un sistema de planificación de misión, destinado a aeronaves.
La figura 2 muestra un diagrama de flujo que ilustra la función de la primera unidad de cálculo en el sistema en la figura 1.
La figura 3 muestra un diagrama de flujo que ilustra la función de la segunda unidad de cálculo en el sistema en la figura 1.
La figura 4 muestra un ejemplo de la ruta prevista por la primera unidad de cálculo y la ruta refinada calculada por la segunda unidad de cálculo.
Realizaciones preferidas El número de referencia 6 en la figura 1 designa un sistema para calcular una ruta de una aeronave entre una posición inicial y una posición final. El sistema 6 comprende una base de datos de terreno 1, una base de datos de amenazas 2, una primera unidad de cálculo 3 para el cálculo de una ruta preliminar, una segunda unidad de cálculo 4 para la modificación de la ruta preliminar, y una pantalla 5. El sistema 6 puede estar incorporado en su totalidad en la aeronave. Alternativamente, todo el sistema puede estar alojado en una estación de base en tierra (no mostrada) , en cuyo caso los datos relativos a la posición actual (posición de inicio) de la aeronave y su objetivo final son comunicados a la estación de base en tierra a través de un enlace, después de lo cual la estación de base en tierra calcula una ruta y devuelve las coordenadas de esa ruta a la aeronave. En todavía otro ejemplo, algunas partes del sistema 6 están dispuestas en la estación de base en tierra, mientras que el resto están dispuesto en la aeronave. La aeronave puede ser, por ejemplo, un avión de reconocimiento militar, un avión de combate militar o... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para uso en un sistema (6) para calcular una ruta de vuelo (18, 19) entre una primera posición (20) que está representada por la latitud, longitud y altitud y una segunda posición (21) que está representada por la latitud, longitud y altitud, que comprende las etapas de:
- los datos del terreno, incluidos los datos de latitud y longitud con los datos de altitud asociados o similares son almacenados en una base de datos de terreno (1) ;
- los datos relativos a las amenazas, incluyendo por lo menos los datos relativos a la extensión geográfica de las amenazas, son almacenados en una base de datos de amenazas (2) ;
que se caracteriza porque la primera posición (20) se elige inicialmente como la posición actual, y porque las 10 siguientes etapas se repiten hasta que se alcanza la segunda posición (21) :
- una función de coste J (k) es evaluada para un horizonte de predicción predefinido N a lo largo de los radios en un cono en el espacio tridimensional correspondiente a cada trayectoria de vuelo en un conjunto de trayectorias de vuelo potenciales que están predefinidas en relación con la dirección actual de vuelo, en el que la función de coste J (k) de cada trayectoria de vuelo ensayada se determina como una suma de los costes para un número de posiciones de cálculo a lo largo de la trayectoria de vuelo, en el que la función de coste (J (k) ) incluye al menos un subconjunto de los siguientes parámetros:
â un primer parámetro que indica si la trayectoria de vuelo ensayada cruza zonas de amenazas predefinidas;
â un segundo parámetro que indica si la trayectoria de vuelo ensayada pasa demasiado cerca del te20 rreno;
â un tercer parámetro que indica si la trayectoria de vuelo ensayada supera un valor de altitud predefinido:
â un cuarto parámetro que indica si la trayectoria de vuelo ensayada es costosa desde el punto de vista de consumo de combustible;
â un quinto parámetro que indica la distancia a la segunda posición de la ruta;
- una trayectoria de vuelo que produce el valor más ventajoso de la función de coste J (k) se selecciona en base a la posición actual y a la segunda posición (21) , en los datos en la base de datos de terreno y en la base de datos de amenazas;
- las coordenadas de la primera posición de cálculo delante del número de posiciones de cálculo a lo largo de 30 la trayectoria de vuelo son registradas para la trayectoria de vuelo seleccionada (10) , y -las coordenadas de la primera posición de cálculo delante del número de posiciones de cálculo a lo largo de la trayectoria de vuelo para la trayectoria de vuelo seleccionada (10) se eligen como la nueva posición actual (11) .
2. Un procedimiento de acuerdo con la reivindicación 1, que se caracteriza porque las trayectorias de vuelo en el conjunto de trayectorias de vuelo se seleccionan sobre la base de una secuencia de señales de control predefinidas pertenecientes a cada trayectoria de vuelo, en el que la señal de control de la secuencia de señales de control comprende un componente de señal de control para la conversión en el plano vertical y un componente de la señal de control para la conversión en el plano horizontal.
3. Un procedimiento de acuerdo con la reivindicación 2, que se caracteriza porque la señal segunda hasta la final 40 en cada secuencia de señales de control se ponen a cero.
4. Un procedimiento de acuerdo con la reivindicación 1, que se caracteriza porque después de que la ruta de vuelo se haya calculado entre la primera (2) y la segunda (21) posición, la ruta calculada es refinada en una etapa de refinado, en la que los puntos registrados que se encuentran tan lejos el uno del otro como sea posible, pero entre los que prevalece la visibilidad sin obstáculos, están marcados como puntos de interrupción y 45 porque la ruta (19) se elige como líneas rectas entre estos puntos de interrupción marcados.
5. Un sistema para calcular una ruta de vuelo (18, 19) para una aeronave entre una primera posición (20) que está representada por la latitud, longitud y altitud y una segunda posición (21) que está representada por la latitud, longitud y altitud, que se caracteriza porque el sistema comprende:
- una base de datos de terreno (1) dispuesta para almacenar los datos de terreno, incluyendo datos de latitud y de longitud con los datos de altitud asociados o similares;
- una base de datos de amenazas (2) dispuesta para almacenar datos relativos a amenazas, incluyendo, al menos, los datos relativos a la extensión geográfica de las amenazas;
que se caracteriza porque comprende:
- una primera unidad de cálculo (3) que está conectada operativamente a la base de datos de terreno (1) y a la base de datos de amenazas (2) y dispuesta de manera que calcule la ruta (18) entre las posiciones primera y segunda, con lo cual la primera unidad de cálculo opera de acuerdo con un esquema predeterminado, en el que la primera posición es seleccionada inicialmente como la posición actual, y en el que las si
guientes etapas se repiten hasta que se alcanza la segunda posición:
- una función de coste J (k) es evaluada para un horizonte de predicción N predefinido a lo largo de los radios en un cono en el espacio tridimensional correspondiente a cada trayectoria de vuelo en un conjunto de trayectorias de vuelo potenciales que están predefinidas en relación con la dirección actual de vuelo, en el que la función de coste J (k) para cada trayectoria de vuelo ensayada se determina como una suma de los cos
tes para el cálculo de un número de posiciones a lo largo de la trayectoria de vuelo, en el que la función de coste (J (k) ) incluye al menos un subconjunto de los siguientes parámetros:
- un primer parámetro que indica si la trayectoria de vuelo ensayada cruza zonas de amenazas predefinidas;
- un segundo parámetro que indica si la trayectoria de vuelo ensayada pasa demasiado cerca del 20 terreno;
- un tercer parámetro que indica si la trayectoria de vuelo ensayada excede de un valor de altitud predefinido:
- un cuarto parámetro que indica si la trayectoria de vuelo ensayada es costoso desde el punto de vista de consumo de combustible;
-un quinto parámetro que indica la distancia a la segunda posición de la ruta;
- una trayectoria de vuelo que produce el valor más ventajosa para la función de coste J (k) se selecciona en base a la posición actual y a la segunda posición (21) , a los datos en la base de datos de terreno y en la base de datos de amenazas;
- las coordenadas de la primera posición de cálculo delante del número de posiciones de cálculo a lo largo de 30 la trayectoria de vuelo están registradas para la trayectoria de vuelo seleccionado (10) , y -las coordenadas de la primera posición de cálculo delante del número de posiciones de cálculo a lo largo de la trayectoria de vuelo de la trayectoria de vuelo seleccionada (10) se eligen como la nueva posición actual (11) .
6. Un sistema de acuerdo con la reivindicación 5, que se caracteriza porque la primera unidad de cálculo (3) , la base de datos de terreno (1) y la base de datos de amenazas (2) están conectadas operativamente a una segunda unidad de cálculo (4) , que está dispuesta de manera que reciba la ruta de vuelo calculada por la primera unidad de cálculo ( 3) y la refina, con lo cual los puntos registrados que se encuentran situados tan lejos uno del otro como sea posible, pero entre los que prevalece la visibilidad sin obstáculos, se marcan como puntos de interrupción y porque la ruta (19) se elige como líneas rectas entre estos puntos de interrupción marcados.
7. Un sistema de acuerdo con la reivindicación 5 o 6, que se caracteriza porque todo el sistema está implemento en la aeronave.
8. Un sistema de acuerdo con la reivindicación 5 o 6, que se caracteriza porque el sistema está implementado en parte en la aeronave y en parte en una estación en tierra, con lo cual los datos son comunicados entre la aeronave y la estación base en tierra a través de un enlace.
Patentes similares o relacionadas:
Sugerencia de ruta en tiempo real para un dispositivo móvil con localización habilitada, del 22 de Abril de 2020, de QUALCOMM INCORPORATED: Un procedimiento implementado por ordenador para navegar basándose en la direccionalidad, que comprende: determinar una posición de un […]
Arquitectura de seguridad para vehículos autónomos, del 1 de Abril de 2020, de CARNEGIE MELLON UNIVERSITY: Un sistema de arquitectura de seguridad para vehículos autónomos, que comprende: una primera fase, que comprende: una unidad […]
MÉTODO Y SISTEMA DE NAVEGACIÓN PERSONAL MEDIANTE SONIDO BINAURAL, del 2 de Marzo de 2020, de Geko Navsat S.L: Método y sistema de navegación personal mediante sonido binaural. El sistema comprende unos auriculares estereofónicos y un dispositivo portátil con […]
Aparato de sistema, servidor, terminal, programa y método de suministro de información, del 26 de Febrero de 2020, de RAKUTEN, INC: Un aparato servidor que comprende: un medio de recepción de solicitud de adquisición de información que recibe información de aceleración […]
 Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Método y dispositivo para guiar inteligentemente un usuario a tomar un ascensor/escalera mecánica, del 25 de Diciembre de 2019, de Xiaomi Inc: Un método para guiar inteligentemente un usuario a un ascensor/escalera mecánica, que se aplica en un terminal, incluyendo: determinar […]
Generación de mapa de punto de interés dependiente de localización, del 20 de Noviembre de 2019, de BMC Software, Inc: Método implementado por ordenador, comprendiendo el método: recibir , desde un dispositivo informático remoto, un mapa que indica una disposición […]
Optimización de ruta para un vehículo para medios fluidos, del 13 de Noviembre de 2019, de ThyssenKrupp Marine Systems GmbH: Procedimiento para calcular una ruta para un vehículo para medios fluidos, en donde el vehículo para medios fluidos es un vehículo subacuático, y en donde […]