PROCEDIMIENTO DE REGULACION DE UN SISTEMA DE CONTROL DINAMICO DE TRAYECTORIA PARA VEHICULOS AUTOMOVILES, PROCEDIMIENTO DE SELECCION DE LAS CARACTERISTICAS NEUMATICAS Y PROCEDIMIENTO DE REGULACION DE LA SUSPENSION.
Un procedimiento de regulación de un sistema de control dinámico de trayectoria para vehículo automóvil,
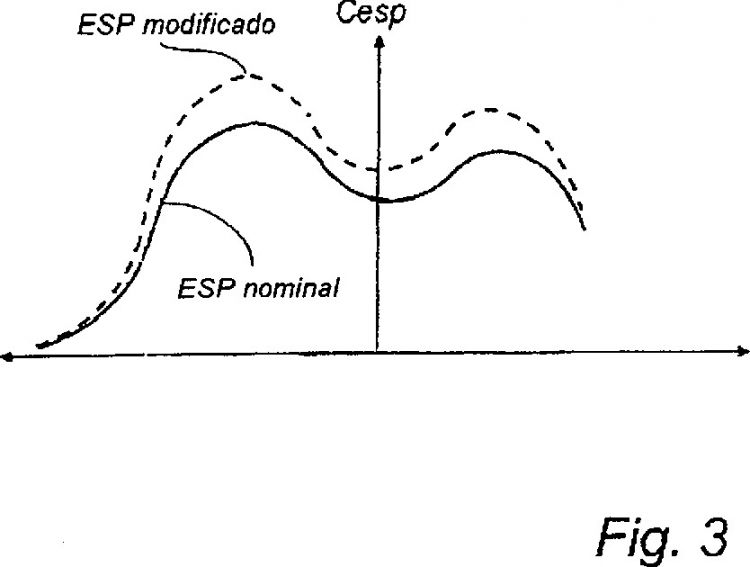
caracterizado porque comprende las etapas siguientes: etapa a: equipamiento de un vehículo con un sistema ESP que posee valores umbrales nominales (Sv), de disparo del sistema ESP, para diferentes velocidades conocidas; etapa b: adquisición en tiempo real sobre dicho vehículo en situación de rodadura, en diferentes instantes, de los ángulos de consigna de desviación (LC); etapa c: adquisición en tiempo real en situación de rodadura, en los mismos instantes, de los ángulos de desviación medidos del vehículo; etapa d: medida del umbral de disparo (St) del ESP en estos diferentes instantes; etapa e: establecimiento de la curva de los valores de consumo (Cesp) en función del tiempo, siendo dicha curva representativa de las diferencias (dCM) de los ángulos de desviación medidos y de consignas de desviación (dCM = LM - LC) referidos a los valores de umbral de disparo (St) medidos; etapa f: modificación de los valores de umbrales nominales (Sv) de un porcentaje que es proporcional a los valores de consumo (Cesp)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07107146.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: WERNERSTRASSE 1,70442 STUTTGART.
Inventor/es: BOUCHARD,CHRISTOPHE, SAUTEREAU,RICHARD.
Fecha de Publicación: .
Fecha Solicitud PCT: 27 de Abril de 2007.
Fecha Concesión Europea: 10 de Febrero de 2010.
Clasificación Internacional de Patentes:
- B60G17/016F
- B60G17/018 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60G SUSPENSION DE VEHICULOS (vehículos de colchón de aire B60V; montajes entre el chasis y el cuerpo del vehículo B62D 24/00). › B60G 17/00 Suspensiones elásticas que permiten ajustar las características de los muelles o de los amortiguadores de vibraciones, regular la distancia entre la superficie portante y la parte suspendida del vehículo o bloquear la suspensión durante la utilización para adaptarse a las condiciones variables del vehículo o del terreno, p. ej. en función de la velocidad o de la carga. › caracterizadas por la utilización de un modo de tratamiento de la señal o de un método de control específicos.
- B60G17/0195 B60G 17/00 […] › caracterizadas porque la regulación es combinada con otros sistemas de control del vehículo.
- B60T8/1755 B60 […] › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Regulación de los frenos especialmente adaptada para el control de la estabilidad del vehículo, p.ej. teniendo en cuenta el ángulo de oscilación o la aceleración transversal al tomar una curva (sistemas de control de la estabilidad dinámica de los vehículos por otra forma que controlando una subunidad particular B60W 30/02).
- B60W40/12 B60 […] › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 40/00 Cálculo o estimación de los parámetros de funcionamiento para el sistema de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular. › relacionados con parámetros del vehículo en sí mismo.
Clasificación PCT:
- B60T8/172 B60T 8/00 […] › Determinación de los parámetros de control utilizados para la regulación, p.ej. por cálculos que implican parámetros medidos o detectados.
- B60W40/12 B60W 40/00 […] › relacionados con parámetros del vehículo en sí mismo.
- B60W50/06 B60W […] › B60W 50/00 Detalles de los sistemas de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular. › para mejorar la respuesta dinámica del sistema de ayuda a la conducción, p.ej. para mejorar la respuesta de regulación o evitar penduleo o inestabilidad.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento de regulación de un sistema de control dinámico de trayectoria para vehículos automóviles, procedimiento de selección de las características neumáticas y procedimiento de regulación de la suspensión.
El invento se refiere a un procedimiento de regulación de un sistema de control dinámico de trayectoria para vehículo automóvil.
El documento WO 02/058976 describe un método de regulación de estabilidad direccional mientras que el documento FR 2.858.951 describe un procedimiento y dispositivo de coordinación de un sistema de regulación de la dinámica de rodadura y de un sistema diferencial.
Un sistema de control dinámico de trayectoria ESP (Programa de Estabilidad Electrónica en terminología anglosajona) es un sistema que permite evitar y/o corregir las inestabilidades de un vehículo. Este sistema está muy ligado a los sistemas de mando de las ruedas del vehículo y en particular al sistema de frenado. El sistema ESP es un sistema global que gestiona el comportamiento general del vehículo y que ayuda al propio conductor en situaciones críticas. Es capaz de intervenir sobre el sistema de antibloqueo de las ruedas (ABS) así como sobre el sistema de antipatinaje ASR.
Es así como permite proporcionar una asistencia al conductor o completar sus órdenes en diferentes situaciones tales como:
Para poder influir sobre el comportamiento del vehículo y para poder elaborar órdenes que permitan al vehículo realizar la trayectoria requerida por el conductor, el sistema de control dinámico de trayectoria debe recibir un gran número de informaciones relativas al comportamiento del vehículo y al de las diferentes ruedas para poder correlacionar estos diferentes comportamientos y aportar las correcciones necesarias con ayuda de un sistema de antibloqueo de las ruedas, del sistema de antipatinaje así como del sistema de mando del par motor.
Una de las maneras de actuar sobre el comportamiento del vehículo es ejercer un frenado sobre una o varias ruedas.
Sin embargo, conviene que el sistema ESP no intervenga más que en los casos absolutamente necesarios en que el conductor no podrá enderezar la situación en la que se encuentra el vehículo sin actuar sobre los frenos. Es preciso por tanto que el umbral de intervención del ESP debe ser definido de manera adaptada y para un tipo de conductor estándar.
Se comprende que el margen de regulación de un sistema ESP con relación a los disparos o intervenciones intempestivos es difícil de conocer. Por otra parte, la puesta a punto de un sistema ESP necesita numerosos ensayos de rodadura para validar los umbrales de disparo de los sistemas ESP.
El invento proporciona un procedimiento que permite resolver estas dificultades.
Según una forma de realización preferida del invento, este procedimiento comprende las etapas siguientes:
- etapa a: equipamiento de un vehículo con un sistema ESP que posee valores de umbrales nominales (Sv) de funcionamiento del sistema de control dinámico de trayectoria ESP para diferentes velocidades,
- etapa b: adquisición en tiempo real sobre dicho vehículo en situación de rodadura, en diferentes instantes, de los ángulos de desviación de consigna,
- etapa c: adquisición en tiempo real en situación de rodadura, en los mismos instantes, de los ángulos de desviación medidos del vehículo,
- etapa d: medida del umbral de disparo (St) del ESP en estos diferentes instantes,
- etapa e: establecimiento de la curva de los valores de consumos en función del tiempo, siendo dicha curva representativa de las diferencias de los ángulos de desviación medidos y de consignas referidos a los valores de umbral de disparo medidos,
- etapa f: modificación de los valores de umbrales nominales de un porcentaje que es proporcional a los valores de consumo.
Según el invento, se puede prever que este procedimiento es un procedimiento de selección de las características neumática más de un vehículo.
Según el invento, este procedimiento es de igual manera ventajosamente un procedimiento de regulación de la suspensión de un vehículo.
Está igualmente previsto que este procedimiento es un procedimiento de regulación dinámico y de puesta a punto del sistema de control dinámico de trayectoria (ESP) de un vehículo.
Los diferentes objetos y características del invento aparecerán más claramente en la descripción y en las figuras adjuntas que representan:
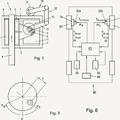
La fig. 1, un vehículo equipado de un sistema de control dinámico de trayectoria,
La fig. 2, un organigrama de un sistema de control dinámico de trayectoria de un sistema de control dinámico de trayectoria al que se aplica el procedimiento del invento,
La fig. 3, curvas que ilustran el procedimiento del invento.
La fig. 1 representa de manera esquemática un vehículo equipado con diferentes captadores que permiten tener informaciones sobre el comportamiento del vehículo.
Se encuentran así:
- los captadores de velocidad de ruedas (CVR1 a CVR4),
- un captador de aceleración lateral CAL,
- un captador de desviación CL,
- un captador de rotación del árbol de dirección LWS,
- etc.
Las diferentes informaciones medidas por estos captadores son transmitidas a un comparador que calcula los diferentes esfuerzos que se ejercen sobre el vehículo.
Un sistema de control dinámico de trayectoria efectúa tratamientos con vistas a elaborar órdenes que son transmitidas a los diferentes órganos del vehículo tales como principalmente el calculador CAN de mando del motor o la unidad de gestión hidráulica (HCU).
La fig. 2 representa un sistema de control dinámico de trayectoria ESP.
En la parte superior se encuentra un bloque que representa simbólicamente un vehículo con:
- su sistema de gestión del motor del vehículo que elabora órdenes del motor,
- su sistema de gestión del sistema hidráulico y en particular del sistema de frenado,
- los diferentes órganos mandados unidos a la rotación y al frenado de las ruedas del vehículo. A estos diferentes órganos están asociados aparatos de medida que proporcionan diferentes informaciones que servirán de parámetros en los tratamientos realizados por el sistema ESP. Se encuentran por tanto en este bloque todas las informaciones posibles que representan las órdenes dadas al vehículo y su comportamiento detectado por diferentes captadores. Se trata, por ejemplo, de los parámetros siguientes:
- ángulo de volante
- velocidad de desviación (que es la velocidad de rotación del vehículo alrededor de su eje vertical).
En la parte inferior de la fig. 2 se encuentran los sistemas de antibloqueo de las ruedas ABS, de antipatinaje ASR y de regulación del par de inercia del motor MSR. Estos sistemas reciben los parámetros relativos al comportamiento del vehículo y de las ruedas (velocidad de rotación) y proporcionan órdenes apropiadas al sistema de gestión del motor del vehículo y al sistema de gestión del sistema hidráulico.
En la parte central de la figura, se encuentra el sistema de control dinámico de trayectoria ESP. Este sistema ESP comprende:
- un comparador que recibe las diferentes informaciones tomadas por los captadores del vehículo y que calcula en cada instante los diferentes esfuerzos que se ejercen sobre el vehículo,
- un circuito de cálculo de los valores de consigna de la velocidad de desviación y del ángulo de deriva en función de las órdenes proporcionadas por el conductor (aceleración, ángulo de giro al volante, etc.),
- un circuito regulador que calcula el momento de desviación admisible a partir de las informaciones proporcionadas por el comparador y a partir de los valores de consigna calculados,
- finalmente un circuito que calcula los valores de consigna del par de bloqueo de los frenos y del deslizamiento de los neumáticos y que proporciona órdenes apropiadas al sistema de antibloqueo de las ruedas, al sistema...
Reivindicaciones:
1. Un procedimiento de regulación de un sistema de control dinámico de trayectoria para vehículo automóvil, caracterizado porque comprende las etapas siguientes: etapa a: equipamiento de un vehículo con un sistema ESP que posee valores umbrales nominales (Sv), de disparo del sistema ESP, para diferentes velocidades conocidas; etapa b: adquisición en tiempo real sobre dicho vehículo en situación de rodadura, en diferentes instantes, de los ángulos de consigna de desviación (LC); etapa c: adquisición en tiempo real en situación de rodadura, en los mismos instantes, de los ángulos de desviación medidos del vehículo; etapa d: medida del umbral de disparo (St) del ESP en estos diferentes instantes; etapa e: establecimiento de la curva de los valores de consumo (Cesp) en función del tiempo, siendo dicha curva representativa de las diferencias (dCM) de los ángulos de desviación medidos y de consignas de desviación (dCM = LM - LC) referidos a los valores de umbral de disparo (St) medidos; etapa f: modificación de los valores de umbrales nominales (Sv) de un porcentaje que es proporcional a los valores de consumo (Cesp).
2. Un procedimiento de selección de las características neumáticas de un vehículo, caracterizado porque comprende las etapas siguientes: etapa a: equipamiento de un vehículo con un sistema ESP que posee valores umbrales nominales (Sv) de disparo del sistema ESP para diferentes velocidades conocidas; etapa b: adquisición en tiempo real sobre dicho vehículo en situación de rodadura, en diferentes instantes, de los ángulos de consigna de desviación (LC); etapa c: adquisición en tiempo real en situación de rodadura, en los mismos instantes, de los ángulos de desviación medidos del vehículo (LM); etapa d: medida del umbral de disparo (St) del ESP en estos diferentes instantes; etapa e: establecimiento de la curva de los valores de consumos (Cesp) en función del tiempo, siendo dicha curva representativa de las diferencias (dCM) de los ángulos de desviación medidos y de consigna de desviación (dCM = LM - LC) referidos a los valores de umbral de disparo (St) medidos; etapa f: modificación de los valores de umbrales nominales (Sv) de un porcentaje que es proporcional a los valores de consumo (Cesp).
3. Un procedimiento de selección de la suspensión de un vehículo, caracterizado porque comprende las etapas siguientes: etapa a: equipamiento de un vehículo con un sistema ESP que posee valores umbrales nominales (Sv) de funcionamiento de disparo del sistema ESP para diferentes velocidades; etapa b: adquisición en tiempo real sobre dicho vehículo en situación de rodadura, en diferentes instantes, de los ángulos de consigna de desviación (LC); etapa c: adquisición en tiempo real en situación de rodadura, en los mismos instantes, de los ángulos de desviación medidos del vehículo (LM); etapa d: medida del umbral de disparo (St) del ESP en estos diferentes instantes; etapa e: establecimiento de la curva de los valores de consumos (Cesp) en función del tiempo, siendo dicha curva representativa de las diferencias (dCM) de los ángulos de desviación medidos y de consigna de desviación (dCM = LM - LC) referidos a los valores de umbral de disparo (St) medidos; etapa f: modificación de los valores de umbrales nominales (Sv) de un porcentaje que es proporcional a los valores de consumo (Cesp).
4. Un procedimiento según la reivindicación 1, caracterizado porque dicho procedimiento en un procedimiento de regulación dinámica y de puesta a punto del sistema de control dinámico de trayectoria (ESP) de un vehículo.
Patentes similares o relacionadas:
Dispositivo de control de frenado y vehículo del tipo de montar a horcajadas que lo comprende, del 13 de Noviembre de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de control de frenado para un vehículo del tipo de montar a horcajadas que tiene una primera rueda , que comprende: un primer dispositivo […]
 Sistema de freno y procedimiento de frenado para un freno de fricción no lineal de accionamiento eléctrico, del 2 de Enero de 2019, de VE Vienna Engineering Forschungs- und Entwicklungs GmbH: Procedimiento de para accionar un freno de fricción de accionamiento eléctrico con un comportamiento no lineal de fuerza-desplazamiento, […]
Sistema de freno y procedimiento de frenado para un freno de fricción no lineal de accionamiento eléctrico, del 2 de Enero de 2019, de VE Vienna Engineering Forschungs- und Entwicklungs GmbH: Procedimiento de para accionar un freno de fricción de accionamiento eléctrico con un comportamiento no lineal de fuerza-desplazamiento, […]
Procedimiento para advertir al conductor de un vehículo de un riesgo de vuelco y dispositivo de control con esta finalidad, del 13 de Diciembre de 2017, de WABCO GMBH: Procedimiento para advertir al conductor de un vehículo de un riesgo de vuelco del vehículo sobre su eje longitudinal, registrando un dispositivo […]
Dispositivo de control para un sistema de frenado de un vehículo, sistema de frenado para un vehículo y método para operar un sistema de frenado de un vehículo, del 9 de Agosto de 2017, de ROBERT BOSCH GMBH: 1. Dispositivo de control para un sistema de frenado de un vehículo, con un aparato de control , mediante el cual el sistema de […]
Procedimiento de frenado automático de un vehículo automóvil, del 12 de Julio de 2017, de PSA Automobiles SA: Procedimiento de frenado automático de un vehículo automóvil, que pone en práctica una función de gestión de la dinámica longitudinal del vehículo , […]
Dispositivo de control de freno escalonado para reventón de neumático de vehículo y método de control del mismo, del 18 de Enero de 2017, de Zhejiang Geely Automobile Research Institute Co., Ltd: Un dispositivo de control de freno escalonado para reventón de neumático de vehículo, incluyendo un sensor de presión de neumático para detectar un […]
Procedimiento y dispositivo para estabilizar la marcha de un remolque que se mueve a bandazos, del 21 de Septiembre de 2016, de AUDI AG: Procedimiento para estabilizar la marcha de un remolque que se mueve a bandazos arrastrado por un vehículo, en el que se frena automáticamente […]
Procedimiento y sistema de frenado para el control de estabilidad de un vehículo, del 13 de Julio de 2016, de CONTINENTAL TEVES AG & CO. OHG: Procedimiento en el que se regula la estabilidad de conducción de un vehículo, en donde se influye sobre una diferencia de tasa de derrape por medio de un momento […]