Procedimiento de reconocimiento mutuo entre actuadores remoto inalámbricos y un dispositivo médico.
Procedimiento para reconocimiento mutuo de actuadores remoto inalámbricos (2) con un dispositivo médico(1) a través de un canal de comunicación inalámbrico,
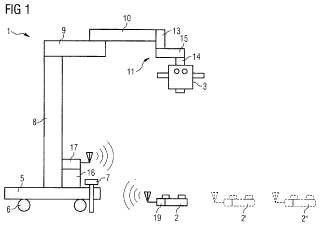
que consta de los pasos: inicio de la operación dereconocimiento mutuo entre un actuador eléctrico inalámbrico (2) y un dispositivo médico (1) y realización de unprocedimiento de reconocimiento mutuo, en el que al actuador (2) se le asigna el dispositivo médico (1), de modoque el inicio de la operación de reconocimiento mutuo tiene lugar des de el dispositivo médico (1) y la potencia detrasmisión del dispositivo médico (1) y del actuador (2) se reduce durante la operación de reconocimiento mutuo, demodo que el inicio de la operación de reconocimiento mutuo provoca una caída de la potencia de trasmisión deltransmisor (17) del dispositivo médico (1) y una posterior emisión de una solicitud para llevar a cabo elprocedimiento de reconocimiento mutuo con una potencia de trasmisión reducida y, al recibirse la solicitud de llevara cabo el procedimiento de reconocimiento mutuo por un actuador (2), la potencia de trasmisión del transmisor (19)del actuador (2) se reduce, antes de enviar una respuesta a la solicitud y de la realización del procedimiento dereconocimiento mutuo.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08075750.
Solicitante: CARL ZEISS MEDITEC AG.
Nacionalidad solicitante: Alemania.
Dirección: GÖSCHWITZER STRASSE 51-52 07745 JENA ALEMANIA.
Inventor/es: GÖTTLICH,JOACHIM.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00).
- A61B19/00
- A61C1/00 A61 […] › A61C TECNICA DENTAL; APARATOS O METODOS PARA HIGIENE ORAL O DENTAL (cepillos dentales no accionados mecánicamente A46B; preparaciones para la técnica dental A61K 6/00; preparaciones para la limpieza de los dientes o enjuagado de la boca A61K 8/00, A61Q 11/00). › Máquinas dentales para taladrar o cortar.
PDF original: ES-2427361_T3.pdf
Fragmento de la descripción:
Procedimiento de reconocimiento mutuo entre actuadores remoto inalámbricos y un dispositivo médico [0001] Durante una operación (OP) es posible utilizar una variedad de dispositivos médicos. Estos dispositivos pueden servir directamente para operar, como por ejemplo, un láser, o para apoyar al médico tratante durante la OP, como por ejemplo, un microscopio quirúrgico. A menudo, el manejo de tales dispositivos médicos por parte de un médico que esté operando o de un asistente se realiza con el pie. Esto, por una parte, está motivado por el hecho de que el médico que opera y el asistente necesitan las manos lo más libres posible para operar y que no las tengan que utilizar para ajustar el dispositivo médico. Por otra parte, a menudo los elementos de mando de dispositivos médicos son difíciles de esterilizar, por lo que, si se tocan con la mano, se corre el riesgo de contaminación.
Cuando en una sala de operaciones se utilizan una consola de mando a pedal u otro actuador eléctrico para controlar un dispositivo médico, por ejemplo, para controlar el bastidor de un microscopio quirúrgico, el correspondiente dispositivo solo deberá ejecutar la función que sea iniciada precisamente por esa consola de mando a pedal o precisamente por ese actuador. Esto se puede lograr mediante una conexión por cable con el actuador (en adelante se entenderá por actuador todo tipo de elemento de mando para el dispositivo médico, incluso, por ejemplo, una consola de mando a pedal) . No obstante, una conexión por cable presenta la desventaja de que, por un lado, constituye un peligro de tropiezo y, por el otro, en los cables podrían enredarse dispositivos médicos transportables. El riesgo se incrementa a medida que en la sala de operaciones se utilicen más dispositivos médicos y actuadores asignados.
Por consiguiente, se aspira a reemplazar actuadores conectados por cable con actuadores inalámbricos, en los que la comunicación entre el actuador y el dispositivo médico tenga lugar inalámbricamente, por ejemplo, a través de señales radioeléctricas, señales infrarrojas, señales de ultrasonido, etc. Cuando tales actuadores inalámbricos se emplean para controlar un dispositivo médico, el correspondiente bastidor solo deberá ejecutar las funciones que sean iniciadas por un actuador que previamente se le haya asignado al dispositivo médico ejecutando un procedimiento especial de reconocimiento mutuo, también llamado “pairing”. Si se disparasen funciones por otro actuador que se encontrase en las cercanías y que correspondiese a otro dispositivo, se podrían ocasionar complicaciones.
Una consola de mando a pedal inalámbrica para un dispositivo de tratamiento médico se describe en el documento WO 2007/084668 A2. Para el reconocimiento de la consola de mando a pedal se acciona una tecla de sincronización dispuesta en la consola de mando a pedal que dispara un procedimiento de reconocimiento mutuo en el dispositivo médico. Durante el procedimiento de reconocimiento mutuo se intercambian direcciones de identificación del actuador y del dispositivo médico.
Del mismo modo se describe un actuador inalámbrico para un dispositivo médico en el documento WO 2004/019751 A2. También en este actuador, el procedimiento de reconocimiento mutuo es disparado por el actuador. A diferencia de la consola de mando a pedal del documento WO 2007/084668 A2 5, el procedimiento de reconocimiento mutuo no se realiza a través de la ruta inalámbrica de transmisión de señales propiamente dicha, sino a través de una segunda ruta de transmisión de señales con escaso alcance, especialmente prevista para el
procedimiento de reconocimiento mutuo. Por consiguiente, para ejecutar el procedimiento de reconocimiento mutuo la consola de mando a pedal deberá aproximarse al dispositivo médico puesto que, de lo contrario, debido al escaso alcance de la ruta especial de transmisión de señales, no sería posible una ejecución del procedimiento de reconocimiento mutuo. De este modo se reduce el peligro de un reconocimiento mutuo por descuido con otro dispositivo médico equivocado, más alejado.
El documento US 2006/0116667 A1 describe un sistema médico con una unidad de mando central que se comunica inalámbricamente, por ejemplo, con una consola de mando a pedal. Para la comunicación, ambas presentan un receptor de radio y el correspondiente transmisor. Además, la consola de mando a pedal presenta un chip RFID y la unidad de mando central un lector RFID. Para sincronizar la consola de mando a pedal con la unidad de mando central, la consola de mando a pedal se coloca cerca del área correspondiente a la unidad de mando central en la que se encuentra el lector RFID. De este modo se transmite el código de identificación de la consola de mando a pedal a la unidad de mando central. También se describen dispositivos alternativos para llevar a cabo la operación de reconocimiento mutuo, en particular lectores de código de barras, transmisores y receptores infrarrojos y sistemas acústicos.
El documento WO 98/02860 A1 describe la transmisión de un código ID desde una unidad maestra hacia una unidad esclava, de modo que la operación desde la unidad maestra se realiza con reducida potencia de transmisión. También se comenta el empleo de un telemando.
El documento WO 2007/047128 A1 describe un procedimiento para posibilitar una comunicación fiable entre dispositivos médicos vinculados inalámbricamente entre sí. Al respecto, se logra una comunicación fiable mediante el uso en paralelo de varios canales de datos. Además, en el documento se indica la ejecución de una operación de reconocimiento mutuo de un equipo de mando a un dispositivo, pero sin descripción detallada.
El documento WO 96/06499 A2 describe un procedimiento para transmitir datos protegidos desde un telemando hacia un aparato. Al respecto, un transmisor disponible en el telemando puede funcionar con muy escasa potencia para, por ejemplo, en el marco de un proceso de autorización transmitir los datos protegidos solamente al aparato que se encuentre en las cercanías. Frente a este estado de la técnica, es objeto de la presente invención poner a disposición un procedimiento ventajoso para el reconocimiento mutuo de actuadores remoto inalámbricos con un dispositivo médico a través de un canal de comunicación inalámbrico.
Este objeto se resuelve mediante el procedimiento para reconocimiento mutuo de actuadores remoto inalámbricos con un dispositivo médico a través de un canal de comunicación inalámbrico según la reivindicación 1. Las reivindicaciones dependientes contienen formas de realización ventajosas del procedimiento.
El procedimiento, de acuerdo con la invención, para el reconocimiento mutuo de actuadores remoto inalámbricos con un dispositivo médico (1) a través de un canal de comunicación inalámbrico, consta de los pasos: inicio de la operación de reconocimiento mutuo entre un actuador eléctrico inalámbrico y un dispositivo médico y realización de un procedimiento de reconocimiento mutuo, en el que al actuador se le asigna el dispositivo médico. El inicio de la operación de reconocimiento mutuo tiene lugar en el procedimiento, de acuerdo con la invención, desde el dispositivo médico. La potencia de transmisión del dispositivo médico y/o del actuador se reduce durante la operación de reconocimiento mutuo. El inicio de la operación de reconocimiento mutuo provoca una caída de la potencia de transmisión del transmisor del dispositivo médico y una posterior emisión de una solicitud para llevar a cabo el procedimiento de reconocimiento mutuo con una potencia de transmisión reducida. Tras recibirse la solicitud de llevar a cabo el procedimiento de reconocimiento mutuo por un actuador, la potencia de transmisión del transmisor del actuador correspondiente se reduce, antes de enviar una respuesta a la solicitud y de la realización del procedimiento de reconocimiento mutuo.
Como la operación de reconocimiento mutuo es iniciada por el dispositivo médico y no, según lo habitual para el estado de la técnica, por el actuador, la iniciativa para la operación de reconocimiento mutuo recae en el dispositivo médico. De este modo, solo se puede realizar el reconocimiento mutuo del actuador con el dispositivo médico que ha iniciado la operación de reconocimiento mutuo. Otros dispositivos médicos que no hayan iniciado una operación de reconocimiento mutuo no estarán disponibles para la operación de reconocimiento mutuo, de modo que se pueden evitar reconocimientos mutuos erróneos.
Empero, cuando se utilizan dos o más dispositivos médicos uno junto al otro, de modo que su alcance radioeléctrico se superponga en funcionamiento regular y dos dispositivos médicos con alcance superpuesto... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para reconocimiento mutuo de actuadores remoto inalámbricos (2) con un dispositivo médico (1) a través de un canal de comunicación inalámbrico, que consta de los pasos: inicio de la operación de reconocimiento mutuo entre un actuador eléctrico inalámbrico (2) y un dispositivo médico (1) y realización de un procedimiento de reconocimiento mutuo, en el que al actuador (2) se le asigna el dispositivo médico (1) , de modo que el inicio de la operación de reconocimiento mutuo tiene lugar desde el dispositivo médico (1) y la potencia de trasmisión del dispositivo médico (1) y del actuador (2) se reduce durante la operación de reconocimiento mutuo, de modo que el inicio de la operación de reconocimiento mutuo provoca una caída de la potencia de trasmisión del transmisor (17) del dispositivo médico (1) y una posterior emisión de una solicitud para llevar a cabo el procedimiento de reconocimiento mutuo con una potencia de trasmisión reducida y, al recibirse la solicitud de llevar a cabo el procedimiento de reconocimiento mutuo por un actuador (2) , la potencia de trasmisión del transmisor (19) del actuador (2) se reduce, antes de enviar una respuesta a la solicitud y de la realización del procedimiento de reconocimiento mutuo.
2. Procedimiento, según la reivindicación 1, caracterizado porque la solicitud para realizar el procedimiento de reconocimiento mutuo es una solicitud colectiva.
3. Procedimiento, según la reivindicación 1 o 2, caracterizado porque la reducción de la potencia de trasmisión y la respuesta a la solicitud ocurren solo cuando el reconocimiento mutuo es posibilitado por un usuario del actuador (2) .
4. Procedimiento, según una de las reivindicaciones anteriores, caracterizado porque una asignación existente de actuadores (2) en el dispositivo médico (1) se cancela cuando el dispositivo médico (1) recibe una respuesta.
5. Procedimiento, según una de las reivindicaciones anteriores, caracterizado porque la operación de reconocimiento mutuo es finalizada por el dispositivo médico (1) si ningún actuador (2) responde a la solicitud del dispositivo médico (1) dentro de un período de tiempo predeterminado.
6. Procedimiento, según una de las reivindicaciones anteriores, caracterizado porque los códigos de identificación se intercambian durante el procedimiento de reconocimiento mutuo.
7. Procedimiento, según la reivindicación 6, caracterizado porque los códigos de identificación respectivos se almacenan en el dispositivo médico (1) y/o en el actuador (2) en una memoria no volátil.
8. Procedimiento, según una de las reivindicaciones anteriores, caracterizado porque la asignación de los actuadores (2) ya reconocidos mutuamente con el dispositivo médico (1) es retenida en el dispositivo médico (1) cuando a otro actuador (2) se le realiza reconocimiento mutuo con el dispositivo médico (1) .
9. Procedimiento, según la reivindicación 8, caracterizado porque la asignación de todos los actuadores (2) reconocidos mutuamente con el dispositivo médico (1) es cancelada en el dispositivo médico (1) en respuesta a una orden de cancelación.
10. Procedimiento, según una de las reivindicaciones anteriores, caracterizado porque la potencia de trasmisión del dispositivo médico (1) y/o del actuador (2) se incrementa nuevamente luego de concluido el procedimiento de reconocimiento mutuo.
Patentes similares o relacionadas:
 Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Sistemas para el tratamiento de enfermedades del ojo, del 22 de Julio de 2020, de ALCON, INC: Un dispositivo para tratar un ojo de mamífero que tiene un párpado , que comprende: un escudo escleral que puede posicionarse cerca de una superficie […]
Herramienta de pinza de agarre, del 22 de Julio de 2020, de COLOPLAST A/S: Herramienta de pinza de agarre para extraer una endoprótesis desde un paciente, que comprende: una carcasa de mango que forma una parte […]
Adaptadores quirúrgicos para usar entre el conjunto de mango quirúrgico y las unidades de carga quirúrgica, del 22 de Julio de 2020, de Covidien LP (100.0%): Un conjunto adaptador para interconectar selectivamente una unidad de carga quirúrgica y un conjunto de mango que tiene al menos un […]
Aparatos de grapado quirúrgico, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aparato de grapado quirúrgico , que comprende: una carcasa que tiene un actuador ; un miembro alargado que se extiende desde la carcasa; […]
Aplicadores que tienen sujetadores implantables para braquiterapia, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aplicador de sujetadores que comprende: una porción de cuerpo que incluye un conjunto de mango ; un conjunto […]
Interfaz de manipulador robótico para herramientas quirúrgicas articuladas, del 8 de Julio de 2020, de Microsure B.V: Interfaz de manipulador robótico para acoplar una herramienta quirúrgica articulada a un manipulador de un robot quirúrgico, comprendiendo […]
Implante quirúrgico para la reparación de la pared muscular, del 1 de Julio de 2020, de JOHNSON & JOHNSON MEDICAL GMBH: Un implante quirúrgico adaptado para reparar un defecto del tejido o de la pared muscular, que comprende una sección exterior y una sección interior (6; […]