PROCEDIMIENTO PARA EL PROCESAMIENTO DE DATOS BRUTOS DE TOPS (OBSERVACIÓN DEL TERRENO POR BARRIDO PROGRESIVO) - SAR (RADAR DE APERTURA SINTÉTICA).
Procedimiento para el procesamiento de datos brutos de TOPS (observación del terreno por barrido progresivo)-SAR (radar de apertura sintética) en datos de imagen de alta precisión,
caracterizado por un procesamiento bidimensional de los datos brutos de TOPS-SAR mediante un procedimiento de escalado de frecuencias y un procedimiento de escalado en el acimut en la banda de base, usando los siguientes pasos sucesivos: a) división de los datos brutos de TOPS-SAR en datos de subapertura asociados al acimut (3.1); b) realización de una FFT de corto tiempo asociada al acimut (3.2); c) multiplicación de la señal por una función de escalada de frecuencias HCS, definida por en la que fa es la frecuencia asociada al acimut, r0 la distancia más corta de un blanco, rref una distancia de referencia, τ el tiempo en la dirección del alcance, denominado también dirección "range", es decir, el tiempo de transmisión del eco, el factor a(fa) describe la dependencia de frecuencia de la migración de las células en la dirección del alcance conforme a, λ es una longitud de onda, v designa la velocidad en el suelo, Keff(fa; rref) la tasa de modulación dependiente de la frecuencia asociada al acimut fa y de la distancia de referencia rref en la dirección del alcance y τref(fa) significa un tiempo de transmisión del eco de referencia dependiente de la frecuencia asociada al acimut fa (3.3, 3.4); d) realización de una FFT asociada al alcance para obtener la señal en el intervalo de frecuencias bidimensional (3.5); e) multiplicación de la señal por la función de fase Hrcmc, definida por para realizar la corrección de la migración de las células en la dirección del alcance, la compresión en la dirección del alcance y la compresión secundaria en la dirección del alcance, en la que fr es la frecuencia asociada al alcance y c la velocidad de la luz (3.6, 3.7); f) realización de una IFFT asociada al alcance para incorporar la señal en el intervalo Doppler asociado al alcance (3.8); g) multiplicación de la señal por una función de corrección de fase Hcorr, definida por en la que r0 es la distancia más corta a un objeto puntual (3.9, 3.10); h) multiplicación de los datos bidimensionales recibidos en el intervalo Doppler asociado al alcance (= "range") y tras realizar los pasos principales de una compresión en la dirección del alcance y una corrección de la migración de las células en la dirección del alcance de un blanco por una función de fase Ha(fa; r0), definida por en la que y en la que r es el vector distancia, Kscl(r) una tasa Doppler independiente del alcance, rrot0 una distancia de rotación como consecuencia de la geometría de TOPS, rscl0 un alcance de escalado seleccionado en función de la distancia definitiva deseada de la imagen, rscl(r) un vector distancia de escalado, por lo que los valores del alcance de escalado se encuentran dentro de una dimensión de alcance de una imagen y por lo que rrot(r) es un vector de distancia de rotación dependiente del alcance (3.11, 3.12); i) transformación de los datos de subapertura mediante IFFT de corto tiempo asociadas al acimut de vuelta al intervalo de tiempo asociado al acimut y al alcance (3.13); j) combinación de las subaperturas en la dirección del acimut (3.14); k) multiplicación de los datos bidimensionales por una función de desrotación Hderot(t,r), definida por en la que t es el vector de tiempo en la dirección del acimut y tmid el tiempo medio de la ráfaga de pulsos (3.15, 3.16); l) transformación de los datos desrotados mediante FFT de largo tiempo asociadas al acimut en el intervalo Doppler asociado al alcance (3.17); m) seguidamente, multiplicación de los datos bidimensionales por una función de compresión en la dirección del acimut Hcomp(fa,r), definida por en la que es la tasa de modulación en frecuencia efectiva después de las operaciones de escalado y desrotación, W(fa) la función de ponderación para la supresión de los lóbulos laterales y fDC el centroide Doppler medio de la adquisición de datos, siendo éste el único punto óptimo en el modo TOPS en el que la aplicación de la función de ponderación para la supresión de los lóbulos laterales proporciona resultados correctos, puesto que todos los blancos se encuentran en la banda de base (3.18, 3.19); n) transformación de los datos mediante una IFFT de largo tiempo asociada al acimut en los datos de imagen (3.20); y o) multiplicación de los datos de imagen bidimensionales por una función de fase Hfase(t,r), definida por en la que para lograr una conservación de fase (3.21, 3.22)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/005180.
Solicitante: DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V..
Nacionalidad solicitante: Alemania.
Dirección: LINDER HOHE 51147 KOLN ALEMANIA.
Inventor/es: PRATS,PAU, MITTERMAYER,JOSEF, MOREIRA,ALBERTO, SCHEIBER,ROLF.
Fecha de Publicación: .
Fecha Solicitud PCT: 26 de Junio de 2008.
Clasificación Internacional de Patentes:
- G01S13/90S
- G01S13/90T
Clasificación PCT:
- G01S13/90 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › que utilizan técnicas de apertura sintética.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento para el procesamiento de datos brutos de TOPS (observación del terreno por barrido progresivo) - SAR (radar de apertura sintética).
Campo técnico
La invención se refiere a un procedimiento para el procesamiento de datos brutos de TOPS (Terrain Observation by Progressive Scan, observación del terreno por barrido progresivo)-SAR (Synthetic Aperture Radar, radar de apertura sintética) en datos de imagen de alta precisión.
A continuación se proporcionará en primer lugar una breve introducción a SAR y TOPS-SAR. Un radar con apertura sintética, abreviado SAR (Synthetic Aperture Radar), es un instrumento para la teledetección que se usa crecientemente en la representación, vigilancia y estudio de la superficie terrestre. Un sistema de este tipo se compone de una plataforma de soporte que se desplaza por la superficie terrestre a una velocidad constante, una antena orientada en dirección ortogonal respecto a la dirección del movimiento y un sistema de radar coherente que emite periódicamente pulsos de ondas electromagnéticas de alta frecuencia con una frecuencia de repetición de pulsos PRF.
La dirección del movimiento de la plataforma de soporte se denomina dirección del acimut, y la dirección ortogonal que se dirige en diagonal hacia abajo se denomina dirección del alcance o también dirección "range". En el modo de funcionamiento SAR normal, que se denomina modo de imagen o también modo "Stripmap", se representa durante el vuelo sobre un territorio que se ha de observar una franja con la longitud del trayecto sobrevolado. El ancho de la franja depende, entre otras cosas, de la longitud de la ventana temporal en la que se reciben los ecos del radar retroreflejados de los pulsos emitidos. Los ecos recibidos se convierten en frecuencia (mezclan), se desmodulan, se digitalizan y se depositan en forma de los denominados datos brutos en una memoria de señales de eco bidimensional.
Cada procesamiento SAR comprende esencialmente una compresión en la dirección del alcance, una corrección de la migración de las células en la dirección del alcance, conocida también como migración en profundidad, y una compresión en dirección del acimut. La resolución geométrica en la dirección del alcance es una función del ancho de banda de los pulsos de radar emitidos. Para mejorar esta resolución se modulan previamente los pulsos emitidos, para lo cual se usa en la mayoría de los casos una modulación de frecuencia lineal, que también se presupondrá en lo sucesivo. La compresión en la dirección del alcance significa la filtración de las señales recibidas en la dirección del alcance según la teoría del filtro adaptado ("matched filter"), por medio de lo cual se comprimen en pulsos las señales expandidas en el tiempo.
La migración de las células en la dirección del alcance (migración en profundidad) es consecuencia del cambio de la distancia entre la antena y el objeto puntual durante la formación de la apertura sintética. La corrección de la migración en profundidad corrige la migración en la dirección del alcance de los ecos pertenecientes a un objeto puntual en la memoria de datos brutos bidimensional de señales de eco.
La compresión de pulsos en la dirección del acimut según la teoría del filtro adaptado equivale a la formación de la apertura sintética. La modulación en la dirección del acimut es igualmente consecuencia de la variación de la distancia entre la antena y el objeto al paso de la plataforma de soporte. El filtrado adaptado significa la suma coherente de todos los ecos que pertenecen a una posición asociada al acimut. Cuando la migración de las células en la dirección del alcance se corrige antes de la compresión en la dirección del acimut, la compresión en la dirección del acimut se puede realizar mediante una función de filtro unidimensional.
El SAR de haz concentrado y el SAR de haz concentrado deslizante ("sliding") son modos de funcionamiento de los sistemas SAR que permiten obtener una resolución geométrica significativamente mayor. En el modo de haz concentrado, la antena se dirige durante todo el vuelo, es decir, se gira de forma correspondiente en la dirección del acimut, de manera que ilumine una misma área de la escena (punto; "spot"). De esta manera se puede mejorar la resolución en la dirección del acimut en comparación con el modo de imagen habitual. Las dimensiones observadas de la escena, sin embargo, se reducen drásticamente. En el modo de haz concentrado deslizante el centro de rotación no está en el centro de la antena, sino más apartado de la escena iluminada, de manera que se puede cubrir una región más grande que en el caso del haz concentrado.
Otro modo de registro SAR es el denominado modo ScanSAR. En el modo ScanSAR se modifica periódicamente el haz de la antena para iluminar diferentes subfranjas ("subswaths") en la dirección del alcance, es decir, franjas dispuestas a diferentes distancias de la trayectoria de vuelo. Esto permite incrementar el ancho de la franja a costa de la resolución en la dirección del acimut. Este modo también se conoce por el nombre de "modo de franja ancha".
A continuación se proporciona una descripción detallada del modo ScanSAR. La cobertura de franja ancha se logra por conmutación periódica de la elevación del haz de la antena de manera que el haz de la antena esté dirigido, dependiendo del ángulo de elevación conectado, a una subfranja diferente en la dirección del alcance. La conmutación del haz de la antena tiene como consecuencia que el sensor registra una secuencia finita de ecos, es decir, una ráfaga de pulsos, para cada una de las subfranjas representadas. En cada subfranja el explorador registra cíclicamente ráfagas de pulsos para un tiempo de mantenimiento TD que se repite con un periodo TR ("duración del ciclo").
La relación TF/TR (TF es el tiempo de recepción de la antena) redondeada al número entero más bajo indica el número de observaciones representadas. El funcionamiento en modo de ráfagas de pulsos, necesario para lograr una cobertura de franja ancha, limita el registro Doppler para cada blanco a una relación TD/TF en comparación con una adquisición SAR en modo de imagen ("stripmap") equivalente. Como consecuencia de ello, el ancho de banda registrado en el acimut para cada blanco se reduce por el mismo valor y la resolución en la dirección del acimut empeora de forma correspondiente.
El modo ScanSAR presenta algunos inconvenientes. Se genera un efecto de festón ("scalloping"), es decir, una modulación periódica de la amplitud en la imagen enfocada, así como una relación de ambigüedad variable asociada al acimut y un sigma-cero (σ0) equivalente al ruido. Estos fenómenos son consecuencia del hecho de que se observan diferentes blancos con diferentes intervalos del diagrama de radiación de la antena en la dirección del acimut.
En un artículo de F. De Zan, A. Monti Guarnieri: "TOPSAR: Terrain observation by progressive scan", IEEE Trans. on Geosci. and Remote Sensing, vol. 44, nº 9, páginas 2352-2360, septiembre de 2006, se ha propuesto un nuevo modo de adquisición de franja ancha, denominado TOPS-SAR. Éste supera los inconvenientes principales del modo ScanSAR antes descrito con la ayuda de una orientación de la antena en dirección del vuelo.
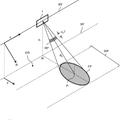
La solución propuesta en el artículo antes mencionado para lograr la misma cobertura de franja evitando al mismo tiempo los efectos no deseados consiste, a diferencia del caso del haz concentrado, en el giro opuesto de la antena durante la adquisición, es decir, en la dirección de giro opuesta desde atrás hacia delante, con una velocidad de rotación constante ωr (véase la fig. 1), lo que produce un efecto contrario, es decir, un empeoramiento de la resolución en la dirección del acimut.
No obstante, todos los blancos se observan bajo el mismo diagrama de radiación de la antena en la dirección del acimut y por ello desaparece el efecto de festón ("scalloping"), y las ambigüedades en acimut y el sigma-cero equivalente al ruido se vuelven constantes en la dirección del acimut. Al final de una ráfaga de pulsos (duración de la ráfaga de pulsos TB1, TB2, ...), el ángulo de visibilidad de la antena A, que se desplaza con la velocidad v en dirección del acimut, se dirige para iluminar una subfranja siguiente, es decir, se modifica de nuevo hacia atrás desde la dirección a la primera subfranja (subfranja 1), para iluminar la segunda subfranja (subfranja...
Reivindicaciones:
1. Procedimiento para el procesamiento de datos brutos de TOPS (observación del terreno por barrido progresivo)-SAR (radar de apertura sintética) en datos de imagen de alta precisión, caracterizado por un procesamiento bidimensional de los datos brutos de TOPS-SAR mediante un procedimiento de escalado de frecuencias y un procedimiento de escalado en el acimut en la banda de base, usando los siguientes pasos sucesivos:
a) división de los datos brutos de TOPS-SAR en datos de subapertura asociados al acimut (3.1);
b) realización de una FFT de corto tiempo asociada al acimut (3.2);
c) multiplicación de la señal por una función de escalada de frecuencias HCS, definida por

en la que fa es la frecuencia asociada al acimut, r0 la distancia más corta de un blanco, rref una distancia de referencia, τ el tiempo en la dirección del alcance, denominado también dirección "range", es decir, el tiempo de transmisión del eco, el factor a(fa) describe la dependencia de frecuencia de la migración de las células en la dirección del alcance conforme a,  λ es una longitud de onda, v designa la velocidad en el suelo, Keff(fa; rref) la tasa de modulación dependiente de la frecuencia asociada al acimut fa y de la distancia de referencia rref en la dirección del alcance y τref(fa) significa un tiempo de transmisión del eco de referencia dependiente de la frecuencia asociada al acimut fa (3.3, 3.4);
λ es una longitud de onda, v designa la velocidad en el suelo, Keff(fa; rref) la tasa de modulación dependiente de la frecuencia asociada al acimut fa y de la distancia de referencia rref en la dirección del alcance y τref(fa) significa un tiempo de transmisión del eco de referencia dependiente de la frecuencia asociada al acimut fa (3.3, 3.4);
d) realización de una FFT asociada al alcance para obtener la señal en el intervalo de frecuencias bidimensional (3.5);
e) multiplicación de la señal por la función de fase Hrcmc, definida por

para realizar la corrección de la migración de las células en la dirección del alcance, la compresión en la dirección del alcance y la compresión secundaria en la dirección del alcance, en la que fr es la frecuencia asociada al alcance y c la velocidad de la luz (3.6, 3.7);
f) realización de una IFFT asociada al alcance para incorporar la señal en el intervalo Doppler asociado al alcance (3.8);
g) multiplicación de la señal por una función de corrección de fase Hcorr, definida por

en la que r0 es la distancia más corta a un objeto puntual (3.9, 3.10);
h) multiplicación de los datos bidimensionales recibidos en el intervalo Doppler asociado al alcance (= "range") y tras realizar los pasos principales de una compresión en la dirección del alcance y una corrección de la migración de las células en la dirección del alcance de un blanco por una función de fase Ha(fa; r0), definida por

en la que

y en la que r es el vector distancia, Kscl(r) una tasa Doppler independiente del alcance, rrot0 una distancia de rotación como consecuencia de la geometría de TOPS, rscl0 un alcance de escalado seleccionado en función de la distancia definitiva deseada de la imagen, rscl(r) un vector distancia de escalado, por lo que los valores del alcance de escalado se encuentran dentro de una dimensión de alcance de una imagen y por lo que rrot(r) es un vector de distancia de rotación dependiente del alcance (3.11, 3.12);
i) transformación de los datos de subapertura mediante IFFT de corto tiempo asociadas al acimut de vuelta al intervalo de tiempo asociado al acimut y al alcance (3.13);
j) combinación de las subaperturas en la dirección del acimut (3.14);
k) multiplicación de los datos bidimensionales por una función de desrotación Hderot(t,r), definida por

en la que t es el vector de tiempo en la dirección del acimut y tmid el tiempo medio de la ráfaga de pulsos (3.15, 3.16);
l) transformación de los datos desrotados mediante FFT de largo tiempo asociadas al acimut en el intervalo Doppler asociado al alcance (3.17);
m) seguidamente, multiplicación de los datos bidimensionales por una función de compresión en la dirección del acimut Hcomp(fa,r), definida por

en la que

es la tasa de modulación en frecuencia efectiva después de las operaciones de escalado y desrotación, W(fa) la función de ponderación para la supresión de los lóbulos laterales y fDC el centroide Doppler medio de la adquisición de datos, siendo éste el único punto óptimo en el modo TOPS en el que la aplicación de la función de ponderación para la supresión de los lóbulos laterales proporciona resultados correctos, puesto que todos los blancos se encuentran en la banda de base (3.18, 3.19);
n) transformación de los datos mediante una IFFT de largo tiempo asociada al acimut en los datos de imagen (3.20); y
o) multiplicación de los datos de imagen bidimensionales por una función de fase Hfase(t,r), definida por

en la que
para lograr una conservación de fase (3.21, 3.22).
2. Uso del procedimiento de acuerdo con la reivindicación 1 para un procesamiento bidimensional de datos brutos de SAR, SONAR y sísmicos en modos de imagen usando un giro mecánico y/o electrónico del diagrama de la antena en la dirección del acimut y/o de la elevación.
Patentes similares o relacionadas:
 PROCEDIMIENTO DE FILTRADO DE LAS SEÑALES DE INTERFERENCIA PARA UNA ANTENA MOVIL MULTICANAL, del 1 de Abril de 2011, de THALES: Procedimiento de filtrado de las señales de interferencia para una antena móvil multicanal, que se caracteriza porque consta de: - una fase […]
PROCEDIMIENTO DE FILTRADO DE LAS SEÑALES DE INTERFERENCIA PARA UNA ANTENA MOVIL MULTICANAL, del 1 de Abril de 2011, de THALES: Procedimiento de filtrado de las señales de interferencia para una antena móvil multicanal, que se caracteriza porque consta de: - una fase […]
 Procedimiento y dispositivo para el procesamiento de datos brutos SAR, del 29 de Julio de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para el procesamiento asistido por ordenador de datos brutos SAR (RD), que comprenden ecos de radar de pulsos de radar (RD), que […]
Procedimiento y dispositivo para el procesamiento de datos brutos SAR, del 29 de Julio de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para el procesamiento asistido por ordenador de datos brutos SAR (RD), que comprenden ecos de radar de pulsos de radar (RD), que […]
Radar de formación de imágenes subsuperficie, del 22 de Abril de 2020, de SAAB AB: Un procedimiento para eliminar los ecos parásitos superficiales en el radar de apertura sintética, SAR, formación de imágenes de objetivos de subsuperficie […]
Detección de barcos en datos de radar de interferometría, del 15 de Enero de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para averiguar una posición y una dirección de navegación en cada caso para uno o varios vehículos acuáticos que navegan en el agua a partir de datos de interferometría […]
Procedimiento de adquisición de imágenes de una escena, desde un sensor a bordo de un portador en desplazamiento, con servocontrol de su línea de visión, del 25 de Diciembre de 2019, de THALES: Procedimiento de adquisición de imágenes de una escena terrestre predeterminada, desde un portador en desplazamiento según una trayectoria […]
Radar interferométrico con antena giratoria, del 25 de Diciembre de 2019, de UNIVERSITA' DEGLI STUDI DI FIRENZE: Un radar interferométrico, que comprende: un brazo , que gira con respecto a un eje (z) de un plano (zx) ortogonal a un eje de rotación (y); un […]
Geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica usando dos imágenes de SAR de apertura larga, del 20 de Noviembre de 2019, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Método para la geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica […]
Búsqueda e identificación electromagnética en zonas de campo cercano, del 8 de Mayo de 2019, de Levitection Ltd: Un procedimiento de detección, que comprende las etapas de: (a) transmitir secuencialmente una señal de cada uno de una pluralidad de transmisores (TE); (b) recibir, […]