Procedimiento para detectar un paso de frontera.
Procedimiento para detectar un paso de frontera de un objeto (6),
cuyo movimiento se representamediante una secuencia de posiciones (Pi) en un mapa de carreteras digital (1) con segmentos de carreteravectorizados (2) y al 5 menos una frontera (5), que comprende:
determinar un punto de intersección (T0) de la frontera (5) con un segmento de carretera (2) y una dirección dereferencia (R0) en la orientación de este segmento de carretera (2),
proyectar continuamente vectores (vi), que se determinan respectivamente entre una de las posiciones (Pi) y el puntode intersección (T0), en la dirección de referencia (R0) para obtener una secuencia de proyecciones (di, di+1; x1i, x1 i+1),ydetectar un paso de frontera si en la secuencia de proyecciones (di, di+1; x1i, x1i+1), se produce un cambio dedirección o signo.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11450051.
Solicitante: KAPSCH TRAFFICCOM AG.
Nacionalidad solicitante: Austria.
Dirección: Am Europlatz 2 1120 Wien AUSTRIA.
Inventor/es: WEIMANN,FRANZ.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/26 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › especialmente adaptados para la navegación en una red de carreteras.
- G01C21/30 G01C 21/00 […] › Comparación de planos o mapas topográficos.
- G08G1/123 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › que indican la posición de vehículos, p. ej. vehículos de horario determinado.
PDF original: ES-2413104_T3.pdf
Fragmento de la descripción:
Procedimiento para detectar un paso de frontera La presente invención se refiere a un procedimiento para detectar un paso de frontera de un objeto, cuyo movimiento se representa mediante una secuencia de posiciones en un mapa de carreteras digital con segmentos de carretera vectorizados y al menos una frontera.
La detección de un paso de frontera en un mapa de carreteras digital tiene una importancia decisiva, por ejemplo, en caso de sistemas de peaje viario electrónicos que se basan en sistemas globales de navegación por satélite (global navigation satellite system, GNSS) , como GPS, GLONASS, Galileo, etc. En tales sistemas de peaje GNSS, las unidades de a bordo (onboard units, OBUs) situadas en el vehículo determinan continuamente mediante navegación por satélite sus propias posiciones (“position fixes”, posición establecida) que se comparan a continuación con segmentos de carretera de un mapa de carreteras digital (“map matching”) , ya sea de manera descentralizada en los OBUs o de manera centralizada en un servidor del sistema de peaje viario, a fin de determinar el uso de una carretera o de una zona (por ejemplo, una zona urbana) por parte de un vehículo y aplicar el cobro de peaje en base a esto. Para determinar el peaje correcto es necesario a menudo identificar exactamente la entrada y salida de una zona sujeta a peaje. A tal efecto, en el mapa de carreteras digital se definen fronteras virtuales, las llamadas “virtual gantries” (pórticos virtuales) , cuyo cruce se ha de detectar por medio de las posiciones de un vehículo determinadas continuamente.
Por los documentos EP1696208, EP1701322, WO95/14909, DE10155501, WO2004/025574, DE102005016814 y EP0742890 son conocidos los procedimientos más diversos para conseguir este objetivo relativo a la detección, que se basa en la detección de la entrada en zonas determinadas (“geofencing”, geo-vallado) , la comprobación de la secuencia de segmentos de carretera recorridos o una determinación continua de la distancia respecto a un punto límite definido. Todos estos procedimientos conocidos tienen la desventaja de que requieren operaciones de cálculo muy complejas y, por tanto, son poco adecuados para implementaciones en tiempo real en procesadores de OBU con capacidad de cálculo limitada, o en caso de imprecisiones en la determinación de posición, inmanentes al sistema, no puede dar una información fiable sobre un paso de frontera realizado, por ejemplo, si un conductor se aproxima a la frontera, pero da la vuelta poco antes de llegar a ésta.
La invención tiene el objetivo de crear un procedimiento para detectar un paso de frontera de un objeto en un mapa de carreteras digital, que sea más simple y más fiable que los procedimientos conocidos y suministre una información exacta y fiable sobre un paso de frontera realizado. Este objetivo se consigue según la invención con un procedimiento del tipo mencionado al inicio que se caracteriza por las siguientes etapas:
determinar un punto de intersección de la frontera con un segmento de carretera y una dirección de referencia en la orientación de este segmento de carretera, proyectar continuamente vectores, que se determinan respectivamente entre una de las posiciones y el punto de intersección, en la dirección de referencia para obtener una secuencia de proyecciones, y detectar un paso de frontera si en la secuencia de proyecciones se produce un cambio de dirección o signo.
El procedimiento según la invención permite identificar de manera segura y fiable un paso de frontera con medios simples. En este caso se pueden excluir con seguridad los errores de detección, como los que se podrían producir, por ejemplo, al darse la vuelta poco antes de llegar a la frontera.
Las proyecciones de los vectores de posición se pueden determinar de diferente manera. Según una primera realización de la invención, la proyección se lleva a cabo mediante la formación de productos escalares vectoriales de los vectores con la dirección de referencia, y un paso de frontera se detecta por un cambio de signo en los productos escalares. En una realización alternativa de la invención, la proyección se lleva a cabo mediante la transformación de los vectores en un sistema local de coordenadas con la dirección de referencia como eje x, y un paso de frontera se detecta por un cambio de signo en sus coordenadas x. Ambas variantes se pueden calcular con una capacidad de cálculo relativamente pequeña y, por tanto, son adecuadas también para implementaciones en tiempo real tanto en OBUs “map matching” descentralizados (“thick clients”, clientes pesados) como en servidores “map matching” centralizados de un sistema de peaje viario.
Una realización preferida de la invención se caracteriza por la etapa adicional de validar el paso de frontera si los valores de las dos proyecciones situadas antes y después del cambio de dirección o signo superan un mínimo predefinido. De esta manera se pueden tener en cuenta las inexactitudes de la determinación de posiciones y lograr una identificación especialmente fiable del paso de la frontera virtual.
Otra variante preferida del procedimiento de la invención comprende la etapa adicional de validar el paso de frontera si las distancias normales de las dos posiciones, situadas antes y después del cambio de dirección o signo, respecto a la dirección de referencia no superan un máximo predefinido. Esta comprobación adicional permite excluir una detección errónea al circularse por carreteras paralelas cercanas.
La invención se explica detalladamente a continuación por medio de ejemplos de realización preferidos con referencia a los dibujos adjuntos. Muestran:
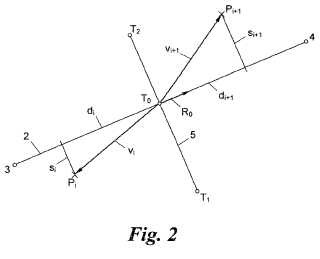
Fig. 1 el movimiento de un objeto en un mapa de carreteras digital, en una vista general esquemática; Fig. 2 una primera realización del procedimiento de la invención mediante la formación de producto escalar
vectorial; y Fig. 3 una segunda realización del procedimiento de la invención mediante transformación de coordenadas.
La figura 1 muestra por secciones un mapa de carreteras digital 1 con una pluralidad de segmentos de carretera 2 que forman una red de carreteras. Los segmentos de carretera 2 están vectorizados, es decir, definidos respectivamente mediante su punto inicial y su punto final 3, 4 en un sistema global de coordenadas xg/yg del mapa de carreteras 1, como es conocido en la técnica.
Uno de los segmentos de carretera 2 cruza al menos una frontera virtual 5. La frontera 5 puede estar situada también en el punto inicial o el punto final 3, 4 de un segmento de carretera 2, es decir, en el punto de unión de dos o varios segmentos de carretera 2; en este caso, la frontera se puede considerar como asignada a uno de estos segmentos de carretera 2.
La frontera 5 puede estar definida como tramo vectorizado con un punto inicial T1 y un punto final T2, pudiéndose determinar directamente su punto de intersección T0 con el segmento de carretera que cruza 2. De manera alternativa, la frontera 5 se puede definir también directamente como este punto de intersección T0.
El movimiento de un objeto 6, por ejemplo, de un vehículo, que determina continuamente posiciones establecidas (position fixes) en el sistema global de coordenadas xg/yg por medio de un OBU GNSS, está representado en el mapa de carreteras 1 mediante una secuencia de posiciones P1, P2, …, en general Pi. En el ejemplo mostrado en la figura 1, el vehículo u objeto 6 recorre la trayectoria de carretera representada arriba, incluyendo también el segmento de carretera 2 con la frontera 5. El paso de la frontera 5 por parte del objeto 6 se detecta de la siguiente manera mediante la evaluación de las posiciones Pi.
La figura 2 muestra dos posiciones sucesivas Pi, Pi+1, a modo de ejemplo, que se determinaron antes y después de la frontera 5. Debido a imprecisiones de la determinación de posición, por ejemplo, imprecisiones GNSS, las posiciones Pi, Pi+1 no se encuentran, por lo general, exactamente en el segmento de carretera 2, sino a una distancia normal Si o Si+i respecto a éste.
Para cada posición Pi de la secuencia de posiciones, a modo de ejemplo en este caso Pi, Pi+1, se calcula un vector Vi entre esta posición y el punto de intersección T0 de la frontera 5 con el segmento de carretera 2. Los vectores Vi se proyectan a continuación en cada caso, o inmediatamente después de calcularse, en el segmento de carretera 2, más exactamente en una dirección de referencia R0 del segmento de carretera 2, de manera que se obtiene una secuencia de proyecciones di. La dirección de referencia R0 se encuentra en la orientación del segmento de carretera 2 y tiene preferentemente, aunque no forzosamente,... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para detectar un paso de frontera de un objeto (6) , cuyo movimiento se representa mediante una secuencia de posiciones (Pi) en un mapa de carreteras digital (1) con segmentos de carretera vectorizados (2) y al menos una frontera (5) , que comprende:
determinar un punto de intersección (T0) de la frontera (5) con un segmento de carretera (2) y una dirección de referencia (R0) en la orientación de este segmento de carretera (2) , proyectar continuamente vectores (vi) , que se determinan respectivamente entre una de las posiciones (Pi) y el punto de intersección (T0) , en la dirección de referencia (R0) para obtener una secuencia de proyecciones (di, di+1; x1i, x1i+1) , y detectar un paso de frontera si en la secuencia de proyecciones (di, di+1; x1i, x1i+1) , se produce un cambio de dirección o signo.
2. Procedimiento según la reivindicación 1, caracterizado porque la proyección se lleva a cabo mediante la formación de productos escalares vectoriales (di, di+1) de los vectores (vi) con la dirección de referencia (R0) , y un paso de frontera se detecta por un cambio de signo en los productos escalares.
3. Procedimiento según la reivindicación 1, caracterizado porque la proyección se lleva a cabo mediante la transformación de los vectores (v1i) en un sistema local de coordenadas (x1/y1) con la dirección de referencia (R0) como eje x (x1) , y un paso de frontera se detecta por un cambio de signo en sus coordenadas x (x1i,
x1i+1) .
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado por la etapa adicional de validar el paso de frontera si los valores de las dos proyecciones (di, di+1; x1i, x1i+1) , situadas antes y después del cambio de dirección o signo, superan un mínimo predefinido (min) .
5. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado por la etapa adicional de validar el paso de frontera si las distancias normales (si, si+1; y1i, y1i+1) de las dos posiciones (Pi, Pi+1) , situadas antes y después del cambio de dirección o signo, respecto a la dirección de referencia (R0) no superan un máximo predefinido (max1, max2, max3) .
REFERENCIAS CITADAS EN LA DESCRIPCIÓN
Esta lista de referencias citadas por el solicitante es únicamente para la comodidad del lector. No forma parte del documento de la patente europea. A pesar del cuidado tenido en la recopilación de las referencias, no se pueden 5 excluir errores u omisiones y la EPO niega toda responsabilidad en este sentido.
Documentos de patente citados en la descripción
EP1696208A [0003] WO2004025574A [0003] EP1701322A [0003] DE102005016814 [0003] WO9514909A [0003] EP0742890A [0003] DE10155501 [0003]
Patentes similares o relacionadas:
Dispositivo telemático a bordo de un vehículo, del 4 de Diciembre de 2019, de Ficosa International S.A: Un dispositivo de comunicación telemática para su instalación en un vehículo, que comprende: una carcasa ; medios de suministro de energía (101, […]
Sistema y método para determinar ubicación de parada de tránsito, del 27 de Noviembre de 2019, de MOOVIT APP GLOBAL LTD: Un método para determinar una ubicación de una parada de tránsito para un sistema de tránsito, comprendiendo el método: registrar una pluralidad […]
SISTEMA DE LLAMADA SEGURA A AUTOBUSES Y PROCEDIMIENTO PARA DICHO SISTEMA, del 17 de Septiembre de 2019, de LOPEZ FRANCISCO, Jose Ramon: Sistema de llamada segura a autobuses y procedimiento para dicho sistema, comprendiendo el sistema: - unos primeros lectores de solicitud de recogida, […]
 Sistema de control y método para vehículos de transporte de pasajeros, y vehículo de transporte de pasajeros configurado para el uso de tal sistema y/o de tal método, del 31 de Octubre de 2018, de IVECO FRANCE S.A.S: Sistema de control para vehículos de transporte de pasajeros, comprendiendo dicho sistema: - al menos una puerta (14a) asociada con una marca (15a) de referencia […]
Sistema de control y método para vehículos de transporte de pasajeros, y vehículo de transporte de pasajeros configurado para el uso de tal sistema y/o de tal método, del 31 de Octubre de 2018, de IVECO FRANCE S.A.S: Sistema de control para vehículos de transporte de pasajeros, comprendiendo dicho sistema: - al menos una puerta (14a) asociada con una marca (15a) de referencia […]
Procedimiento de seguimiento de entidades, del 4 de Abril de 2018, de THALES: Procedimiento de seguimiento de entidades que se mueven en un espacio supervisado representado por un primer modelo digitalizado que consta de un […]
Sistemas y procedimientos para el registro de emergencia de un dispositivo de acceso a red, del 28 de Marzo de 2018, de CONTINENTAL AUTOMOTIVE GMBH: Un procedimiento para el registro de emergencia de un dispositivo de acceso a red para vehículos, comprendiendo el procedimiento: supervisar uno o más […]
Dispositivo de transmisión de posición para vehículo, del 11 de Octubre de 2017, de HONDA MOTOR CO., LTD.: Un dispositivo de transmisión de posición adaptado para su instalación en un vehículo, que comprende: medio de detección de anomalías […]
Gestión de la asistencia y del transporte de al menos un usuario por un vehículo de una flota de vehículos, del 26 de Julio de 2017, de BISMUTH, HENRI: Sistema de gestión de la asistencia y del transporte de al menos un usuario por un vehículo de una flota de vehículos, estando el usuario […]