PROCEDIMIENTO PARA MEMORIZAR Y PARA REPRODUCIR UNA TRAYECTORIA REALIZADA POR UN VEHÍCULO, Y SISTEMA QUE LO IMPLEMENTA.
Se presenta un procedimiento para memorizar una trayectoria seguida por un vehículo con objeto a ser posteriormente reproducida,
mediante el procedimiento para reproducir una trayectoria. También se muestra un sistema para la memorización y para la reproducción que llevan a cabo las etapas del método respectivo. Es de principal interés en la asistencia automática al aparcamiento de vehículos en estacionamientos para liberar al conductor de tareas repetitivas o complejas. Se ha estudiado la seguridad en la posible variación de las condiciones respecto de aquellas en que se memorizó la trayectoria y la viabilidad de rectificaciones.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231022.
Solicitante: SEAT, S.A..
Nacionalidad solicitante: España.
Inventor/es: FERNANDEZ GONZALEZ,José Luis, VIDAL GRIÑÓ,Gerard.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D15/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 15/00 Direcciones no previstas en otro lugar. › Indicadores de dirección.
Fragmento de la descripción:
REALIZADA POR UN VEHÍCULO, Y SISTEMA QUE LO IMPLEMENTA
SECTOR TÉCNICO
La invención se encuadra dentro los sistemas de ayuda a la conducción para automóviles. Más concretamente, se relaciona con los sistemas de asistencia al aparcamiento.
ANTECEDENTES DE LA INVENCIÓN
Son conocidos en el estado de la técnica los siguientes documentos relacionados con la presente invención: ES 2318725T divulga un dispositivo auxiliar de estacionamiento y un procedimiento para la asistencia al estacionamiento. Se registra una trayectoria de desplazamiento durante un trayecto del vehículo automóvil desde un punto inicial hasta un punto final y a continuación se conduce automáticamente hacia atrás el vehículo automóvil a lo largo de la trayectoria de desplazamiento registrada desde el punto final hasta el punto inicial. Las órdenes son emitidas por el conductor desde un sistema de control remoto. Es capaz de reproducir nuevamente la trayectoria del punto inicial al punto final. Sin embargo, plantea una solución con una importante limitación para una longitud total prevista del trayecto de aproximadamente 5 metros. DE 10331948 divulga un método de asistencia al maniobrado, almacenando maniobras registradas y dando apoyo a la realización de las maniobras almacenadas. Dice facilitar la realización de maniobras repetitivas, como aparcar en una plaza de aparcamiento determinada, no obstante carece de detalles y explicaciones de los aspectos tecnológicos implementados para conseguir dicho resultado. Además, no concibe la posibilidad de rectificaciones de la trayectoria, p.e. ante un obstáculo, para recuperar posteriormente la trayectoria memorizada.
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención tiene por objeto liberar al conductor de la necesidad de realizar tareas tediosas y repetitivas a los mandos de un automóvil mientras se realiza cualquier tipo de maniobra repetitiva. El vehículo puede reproducir trayectos previamente memorizados de forma totalmente autónoma, incluidos trayectos largos de más de 100 metros, sin presencia del conductor en el interior del vehículo. Para lograrlo, la presente invención propone un procedimiento y un sistema para memorizar una trayectoria realizada por un vehículo de acuerdo con las reivindicaciones 1 y 18 respectivamente. Es también objeto de la presente invención un método y un sistema, ligados ambos al su correspondiente mencionado anteriormente, para reproducir una trayectoria previamente memorizada de acuerdo con las reivindicaciones independientes 11 y 28 respectivamente. Realizaciones preferentes o ventajosas se definen en las reivindicaciones dependientes.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
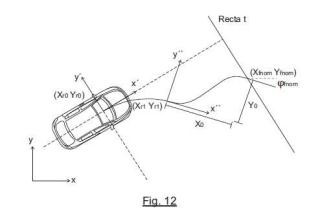
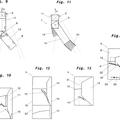
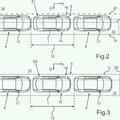
FIG. 1: Muestra los sensores empleados. FIG. 2A-2C: Muestra el campo abarcado por diferentes sensores en mayor detalle. FIG. 3: Muestra un diagrama de flujo correspondiente a la memorización de la trayectoria. FIG. 4: Muestra un diagrama de flujo correspondiente a la reproducción de la trayectoria memorizada. FIG. 5: Muestra un diagrama de flujo correspondiente a la reproducción de la trayectoria memorizada en una segunda fase. FIG. 6: Muestra un diagrama de bloques para un modo de realización. FIG. 7: Muestra un diagrama de flujo correspondiente a la rectificación de la trayectoria en presencia de un obstáculo. FIG. 8A, 8B: Muestra un dibujo de dos situaciones en las que se observa el alcance de las medidas del sensor láser 11 durante la reproducción de una trayectoria ante obstáculos. FIG. 9: Muestra un diagrama de flujo correspondiente a la rectificación de la trayectoria en presencia de un obstáculo. FIG. 10: Muestra un ejemplo de curva parametrizable del centro de masas del vehículo al evitar un obstáculo. FIG. 11: Se muestra la trayectoria nominal o memorizada. FIG. 12: Se muestra la trayectoria corregida.
DESCRIPCIÓN DE UNA REALIZACIÓN PREFERIDA
A continuación se expone un ejemplo de realización con referencia a las figuras. Este ejemplo tiene fines ilustrativos y no debe considerarse limitativo del alcance de la invención. El ejemplo de sistema de asistencia a la reproducción de trayectorias se puede activar y desactivar manualmente mediante un interfaz, por ejemplo una pantalla táctil. La desactivación puede ser ejecutada también de forma automática en determinadas circunstancias. Por ejemplo: detección de alguna avería, si el conductor presiona el pedal de freno, maniobra el volante o activa el freno de estacionamiento electromecánico. Se prevé que el rango de velocidades y aceleraciones sea limitado para evitar problemas tanto de seguridad como de confort.
Memorización de la posición inicial y posiciones en la trayectoria Con el vehículo parado, se analizan las características del entorno con el fin de poder determinar características distintivas de dicha posición como posición inicial de la trayectoria para constituir descriptores de la posición. Preferentemente, se basará en obtener referencias del entorno a través de un escáner láser o lidar 11 y de un sensor de imagen o cámara 12. En la figura 3 se pueden observar una posible secuencia de pasos para memorizar posiciones. Identificar (para posteriormente situar) el vehículo en la posición inicial es muy importante puesto que la información suministrada por la unidad de navegación inercial (INS) permite únicamente conocer la posición relativa de un cuerpo a partir de valores de la aceleración lineal y la velocidad angular medidas por acelerómetros y giroscopios respectivamente. Con la INS se obtienen las medidas para la navegación en forma de coordenadas relativas, es decir, respecto la posición anterior. Se destaca que se produce un error acumulativo al obtener datos que carecen de referencias absolutas. En general, tanto en la posición inicial como en posiciones durante la trayectoria, para obtener los descriptores de una posición se ha de procesar la imagen obtenida por la cámara 12 e identificar bordes verticales (esquinas, aristas, lados, etc.) mayores que un umbral (p.e. 100 píxeles) mediante un procesador 10. Se ha comprobado que estos elementos tienen más opciones de ser referencias características e invariantes frente a cambios de luminosidad, translación, escala... Estos bordes se pueden identificar mediante técnicas de detección de bordes entre las que cabe citar Sobel, Roberts, Prewitt, Frei-Chen o Canny. Sobre ellos se realizan medidas con el sensor láser para recoger la distancia relativa. En el caso de la posición inicial, se ha de llevar a cabo adicionalmente una detección de puntos invariantes que apenas cambien en el entorno. Al elegir puntos invariantes que pertenezcan a bordes se consigue mayor fiabilidad. Existen varias técnicas que permiten obtener los resultados deseados. Entre ellas destacan SIFT, detector de esquinas Shi-Tomasi o detector de esquinas de Harris. Así se logra la transformación de la información existente en una imagen y se obtienen coordenadas invariantes frente a cambios de escala, orientación, cambios de iluminación, translaciones y rotaciones. Con ello se cumple la exigencia de identificar exactamente la posición inicial. También para el caso de establecimiento de la posición inicial es recomendable emplear al menos 2 referencias diferentes para ubicar al vehículo posteriormente para la reproducción de la trayectoria memorizada. Como se ha mencionado, la posición inicial es desde donde se han de repetir las maniobras memorizadas cuando haya que reproducir la trayectoria en un futuro. Por seguridad, puede ser recomendable que adicionalmente el usuario decida si tales referencias son correctas o no teniendo en cuenta los objetos del entorno a los representan. Por ejemplo, si algunas características hacen se refieren a elementos móviles o cambiantes (automóviles, personas, vegetales…) el usuario decidirá que tales referencias no son satisfactorias. Una interfaz 18 puede servir para esta función de validación. El grado de exigencia durante la memorización de puntos no-iniciales de la trayectoria es menor. No hay validación del usuario cuando el vehículo está en movimiento memorizando la trayectoria. No es necesaria la identificación de puntos invariantes durante la captación de la trayectoria. La identificación de dichos puntos invariantes habría de hacerse en tiempo real lo cual complicaría excesivamente los requisitos de capacidad de proceso necesarios para su implementación. En suma, basta que durante la duración de la trayectoria, se capten bordes y se midan distancias relativas con ellos a intervalos de tiempo.
Como elemento común, tanto en el posicionamiento inicial como en la corrección de las sucesivas posiciones de la trayectoria se requerirá como mínimo de dos elementos característicos de la imagen para realizar un exacto posicionado del...
Reivindicaciones:
1. Procedimiento para memorizar una trayectoria realizada por un vehículo caracterizado por que comprende los siguientes pasos: -recoger al menos una imagen del entorno del vehículo en un punto de la trayectoria, mediante al menos una cámara (12) , -procesar la imagen para detectar la presencia de al menos dos bordes esencialmente verticales en la imagen mayores que un umbral predefinido, -medir, mediante un sensor (11) , la posición relativa de cada borde esencialmente vertical respecto del vehículo en dicho punto de la trayectoria, -generar un descriptor del punto de la trayectoria con información visual de cada borde esencialmente vertical detectado y su posición relativa medida, -memorizar cada descriptor del punto de la trayectoria.
2. Procedimiento para memorizar una trayectoria según reivindicación 1, caracterizado por que el paso de procesar las imágenes del entorno del vehiculo , cuando está parado para iniciar la trayectoria, comprende establecer al menos dos descriptores diferentes del punto de inicio de la trayectoria.
3. Procedimiento para memorizar una trayectoria según reivindicación 2, caracterizado por que el paso de establecer un descriptor del punto de inicio de la trayectoria comprende detectar al menos un punto invariante en un borde esencialmente vertical de la imagen recogida.
4. Procedimiento para memorizar una trayectoria según reivindicación 3, caracterizado por que la detección de puntos invariantes se realiza mediante al menos una de las siguientes técnicas: -Scale Invariant Features Transform (SIFT) , -detector de esquinas Shi-Tomasi, -detector de esquinas de Harris.
5. Procedimiento para memorizar una trayectoria según reivindicación 1, caracterizado por que comprende al menos un paso adicional de confirmación por el usuario
6. Procedimiento para memorizar una trayectoria según la reivindicación 1, caracterizado por que se memorizan, a intervalos de tiempo durante la duración de la trayectoria, una pluralidad de descriptores de puntos sucesivos de la trayectoria.
7. Procedimiento para memorizar una trayectoria según una cualquiera de las reivindicaciones anteriores, caracterizado por que establece un descriptor del punto de la trayectoria con información visual del borde esencialmente vertical detectado y su posición relativa comprende realizar una correspondencia lineal entre el campo de visión esencialmente horizontal del sensor (11) y el campo de visión esencialmente horizontal de la cámara (12) mediante un paralelismo entre los ejes longitudinales de ambos.
8. Procedimiento para memorizar una trayectoria según la reivindicación 6 ó 7, caracterizado por que comprende recoger, a intervalos de tiempo mediante al menos un giroscopio (14) y al menos un acelerómetro (15) , información espacial relativa a una pluralidad de puntos sucesivos de la trayectoria.
9. Procedimiento para memorizar una trayectoria según una cualquiera de las
reivindicaciones anteriores, caracterizado por que las imágenes se procesan para
identificar un borde vertical mediante al menos una de las siguientes técnicas:
- Sobel, -Roberts, -Prewitt, -Frei-Chen, -Canny.
10. Procedimiento para memorizar una trayectoria según una cualquiera de las reivindicaciones anteriores, caracterizado por que comprende medir la distancia lateral del vehículo a obstáculos durante la trayectoria mediante al menos un sensor de distancia (11, 13) .
11. Procedimiento para reproducir una trayectoria memorizada de un vehículo caracterizado por que comprende los siguientes pasos: -recuperar un descriptor del punto de inicio de la trayectoria memorizado, -recoger al menos una imagen del entorno del vehículo mediante al menos una cámara (12) ,
- procesar la imagen para identificar al menos dos bordes esencialmente verticales diferentes mayores que un umbral predefinido y establecer dichos bordes verticales como referencias actuales, -medir, mediante un sensor (11) , la posición relativa de cada borde esencialmente vertical respecto del vehículo, -generar al menos dos descriptores actuales con información de cada borde vertical detectado y su posición relativa medida respecto al propio vehículo, -comparar dichos descriptores actuales con los descriptores del punto de inicio de la trayectoria memorizada, -mover el vehículo en función del resultado de la comparación anterior.
12. Procedimiento para reproducir una trayectoria según reivindicación 11, caracterizado por que el paso de generar un descriptor del punto de inicio de la trayectoria comprende detectar al menos un punto invariante comprendido en un borde vertical de la imagen recogida.
13. Procedimiento para reproducir una trayectoria memorizada según la reivindicación 11, caracterizado por que el paso de comparar el descriptor actual con el descriptor del punto de inicio de la trayectoria memorizada comprende a su vez comparar la distancia relativa actual y memorizada entre dichos bordes verticales y el propio vehículo.
14. Procedimiento para reproducir una trayectoria memorizada según una cualquiera de las reivindicaciones 11 a 13, caracterizado por que, si el resultado de la comparación de al menos dos descriptores coincide en un umbral predefinido , se mueve el vehículo hasta un punto siguiente de la trayectoria memorizada.
15. Procedimiento para reproducir una trayectoria memorizada según una cualquiera de las reivindicaciones 11 a 14, caracterizado por que comprende medir mediante al menos un sensor (13) (11) el entorno del vehículo en un punto de la trayectoria actual, para detectar la presencia de obstáculos a una distancia menor que un umbral predefinido para definir las condiciones de frenada a realizar.
16. Procedimiento para reproducir una trayectoria memorizada según una cualquiera de las reivindicaciones 11 a 15, caracterizado por que en presencia de un obstáculo, se interrumpe durante un intervalo de tiempo predefinido el movimiento 17. Procedimiento para reproducir una trayectoria memorizada la reivindicación 15, caracterizado por que si se detecta la presencia del obstáculo transcurrido el intervalo de tiempo predefinido, el sensor (11) mide la posición relativa del obstáculo respecto del vehículo y se estima su ancho y profundidad para calcular la viabilidad de sortearlo en función de
-sucesivos desplazamientos relativos de la trayectoria memorizada,
-distancia mínima del vehículo a obstáculos dispuestos en la trayectoria memorizada,
-espacio lateral disponible mínimo obtenido por alguno de los sensores laterales de distancia (11, 13) .
18. Sistema para memorizar una trayectoria realizada por un vehículo caracterizado por que comprende: -medios para recoger al menos una imagen del entorno del vehículo en un punto de la trayectoria, mediante al menos una cámara (12) , -medios para procesar la imagen para detectar la presencia de al menos dos bordes verticales en la imagen mayores que un umbral predefinido, -medios para medir, mediante un sensor (11) , la posición relativa de cada borde vertical respecto del vehículo en dicho punto de la trayectoria memorizada, -un procesador (10) configurado para generar un descriptor del punto de la trayectoria con información visual de cada borde esencialmente vertical detectado y su posición relativa medida respecto al propio vehículo, -una memoria (30) configurada para almacenar el descriptor del punto de la trayectoria.
19. Sistema para memorizar una trayectoria según reivindicación 18, caracterizado por que el procesador (10) está configurado para establecer al menos dos descriptores diferentes del punto de inicio de la trayectoria en las imágenes del entorno del automóvil, cuando dicho automóvil está parado para iniciar la trayectoria.
20. Sistema para memorizar una trayectoria según reivindicación 19, caracterizado por que el procesador está configurado para detectar al menos un punto invariante en un borde esencialmente vertical de la imagen recogida.
21. Sistema para memorizar una trayectoria según reivindicación 20, caracterizado por que el procesador está configurado para detectar puntos invariantes mediante al menos una de las siguientes técnicas: -Scale Invariant Features Transform (SIFT) , -detector de esquinas Shi-Tomasi, -detector de esquinas de Harris.
22. Sistema para memorizar una trayectoria según reivindicación 20 ó 21, caracterizado por que comprende una interfaz (18) configurada para establecer la confirmación por el usuario .
23. Sistema para memorizar una trayectoria según la reivindicación 18, caracterizado por que la memoria (30) almacena, a intervalos de tiempo durante la duración de la trayectoria, una pluralidad de descriptores de puntos sucesivos de la trayectoria.
24. Sistema para memorizar una trayectoria según una cualquiera de las reivindicaciones anteriores 18 a 23, caracterizado por que el procesador está configurado para realizar una correspondencia lineal entre el campo de visión esencialmente horizontal del sensor (11) y el campo de visión esencialmente horizontal de la cámara (12) mediante un paralelismo entre los ejes longitudinales de ambos.
25. Sistema para memorizar una trayectoria según la reivindicación 23 ó 24, caracterizado por que comprende al menos un giroscopio (14) y al menos un acelerómetro (15) , configurados para recoger información espacial relativa una pluralidad de puntos sucesivos de la trayectoria a intervalos de tiempo.
26. Sistema para memorizar una trayectoria según una cualquiera de las reivindicaciones anteriores 18 a 25, caracterizado por que el procesador (10) está configurado para identificar un borde esencialmente vertical mediante al menos una de las siguientes técnicas:
-Canny.
27. Sistema para memorizar una trayectoria según una cualquiera de las reivindicaciones anteriores 18 a 26, caracterizado por que comprende al menos un sensor de ultrasonidos en cada lateral del vehículo (13) configurado para medir la distancia lateral del vehículo a obstáculos durante la trayectoria.
28. Sistema para reproducir una trayectoria memorizada de un vehículo caracterizado por que comprende los siguientes pasos: -medios para recuperar el descriptor de un punto de inicio de la trayectoria memorizado, -medios para recoger al menos una imagen del entorno del vehículo mediante al menos una cámara (12) , -al menos un procesador (10) configurado para procesar la imagen para identificar al menos dos bordes esencialmente verticales diferentes mayores que un umbral predefinido y establecer dichos bordes esencialmente verticales como referencias actuales, -medios para medir, mediante un sensor (11) , la posición relativa de cada borde vertical respecto del vehículo, donde el procesador está configurado además para generar al menos dos descriptores actuales con información visual de cada borde esencialmente vertical detectado y su posición relativa medida respecto al propio vehículo , y para comparar dichos descriptores actuales con los descriptores del punto de inicio de la trayectoria, -unos actuadores (21, 22, 23, 24) configurados para mover el vehículo en función del resultado de la comparación anterior.
29. Sistema para reproducir una trayectoria según reivindicación 28, caracterizado por que el procesador (10) está configurado para calcular al menos un punto invariante comprendido en un borde esencialmente vertical de la imagen recogida.
30. Sistema para reproducir una trayectoria memorizada según la reivindicación 28, caracterizado por que el procesador (10) está configurado para comparar la distancia relativa actual y memorizada entre dichos bordes verticales y el propio vehículo.
31. Sistema para reproducir una trayectoria memorizada según una cualquiera de las reivindicaciones 28 a 30, caracterizado por que el procesador (10) está configurado, si el resultado de la comparación de al menos dos descriptores es positivo, para enviar instrucciones los actuadores (21, 22, 23, 24) para mover el vehículo hasta un punto siguiente de la trayectoria memorizada.
32. Sistema para reproducir una trayectoria memorizada según una cualquiera de las reivindicaciones 28 a 31, caracterizado por que comprende al menos un sensor (13)
(11) configurado para detectar la presencia de obstáculos a una distancia menor que un umbral predefinido para definir las condiciones de frenada a realizar.
33. Sistema para reproducir una trayectoria memorizada según la reivindicación 32, caracterizado por que en presencia de un obstáculo, se interrumpe durante un intervalo de tiempo predefinido el movimiento asociado al desplazamiento hasta el punto siguiente de la trayectoria memorizada.
34. Sistema para reproducir una trayectoria memorizada según una cualquiera de las reivindicaciones 28 a 33, caracterizado por que el sensor (11) está configurado para medir la posición relativa del obstáculo respecto del vehículo y estimar su ancho y profundidad y transmitir la información al procesador (10) para calcular la viabilidad de sortearlo en función de
-sucesivos desplazamientos relativos de la trayectoria memorizada,
-distancia mínima del vehículo a obstáculos dispuestos en la trayectoria memorizada,
-espacio lateral disponible mínimo obtenido por los sensores laterales de distancia (11) (13) .
Fig. 1
Fig. 2A
Fig. 2B
$2
TRAYECTORIA REAL? NO
NO
Fig. 3
SI
POSICIÓNºFINAL$1
SI
POSICIÓNºFINAL
Fig.º4INICIO
NO
SI
POSICIÓN CORRESPONDENCIA NO INICIAL ENTREºREFERENCIAS? SI
POSICIÓNºINICIAL
$2
Fig.º5
Fig.º6 Fig.º8BNO
SI
DESPLAZAMIENTO PARALELO A OBSTÁCULO
COORDENADAS DESTINO
ORIENTACIÓN DESTINO
SI
ALCANZADA?
Fig.º9Fig.º10
Fig.º11
Fig.º12
Fig.º13
Patentes similares o relacionadas:
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Sistemas y método de ayuda a la conducción de vehículos, del 19 de Febrero de 2020, de Siemens Mobility S.A.S: Sistema de ayuda a la conduccion de un vehiculo , dicho sistema comprende: un dispositivo de determinacion de trayectoria capaz de determinar una trayectoria para […]
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Dispositivo de asistencia para maniobras de atraque en una dársena, del 16 de Octubre de 2019, de NEWTL (Société par Actions Simplifiée): Vehículo de carretera que incluye ruedas delanteras montadas en un eje de dirección delantero y ruedas traseras montadas en un eje trasero […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Sistema de asistencia al conductor, del 11 de Junio de 2019, de ROBERT BOSCH GMBH: Sistema de asistencia al conductor para vehículos a motor, que comprende: - un regulador de guiado longitudinal , el cual está configurado […]
 Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]
Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]