Procedimiento de localización de uno o de varios emisores.
Procedimiento de localización de una o de varias fuentes, encontrándose dicha o dichas fuentes en movimiento con respecto a una red de sensores,
comprendiendo el procedimiento una etapa de separación de las fuentes con el fin de identificar los vectores directores asociados a la respuesta de los sensores en una fuente de incidencia dada, siendo los ángulos de incidencia variables y dependientes de la posición de la red de sensores y de dichas fuentes, que comprende las siguientes etapas:
* asociar los vectores directores a1m...aKm obtenidos para el m-ésimo emisor y respectivamente para los instantes t1...tK, durante un intervalo Dt con el fin de separar los diferentes emisores en cada instante tK;
* localizar la posición (xm, ym, zm) del m-ésimo emisor a partir de los vectores a1m...aKm asociados a un mismo emisor y procedentes de los diferentes instantes tK,
caracterizado dicho procedimiento porque la etapa de localización comprende al menos la siguiente etapa:
maximizar un criterio de correlación vectorial normalizado Lk(x, y, z) en el espacio (x, y, z) de posición de un emisor con con y en las que wk es el vector ruido para todas las posiciones (x, y, z) de un emisor.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2004/052736.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY SUR SEINE FRANCIA.
Inventor/es: HEURGUIER,DOMINIQUE, FERREOL,ANNE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/93 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para anticolisión.
- G01S3/46 G01S […] › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › que utilizan antenas distanciadas entre sí y miden la diferencia de fase o de tiempo entre las señales que provienen de ellos, p. ej. sistemas basados en la diferencia de caminos.
- G01S3/74 G01S 3/00 […] › Sistemas multicanal especialmente adaptados para la localización de la dirección, p. ej. que tienen un sistema de antenas único capaz de proporcionar indicaciones simultáneas de las direcciones de diferentes señales (sistemas en los que las direcciones de diferentes señales se determinan secuencialmente y se presentan en pantalla simultáneamente G01S 3/04, G01S 3/14).
- G01S3/80 G01S 3/00 […] › que utilizan ondas ultrasonoras, sonoras o intrasonoras.
- G01S5/02 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
PDF original: ES-2400352_T3.pdf
Fragmento de la descripción:
Procedimiento de localización de uno o de varios emisores La invención se refiere a un procedimiento de localización de uno o de varios emisores.
Se aplica, en particular, en la localización de emisores instalados en tierra a partir de un dispositivo móvil sin tener conocimiento a priori de las señales emitidas.
El campo técnico es, en particular, el de la localización pasiva de emisores.
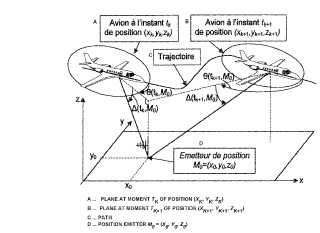
La figura 1 ilustra una localización aerotransportada. El emisor está en la posición (x0, y0, z0) . El portador en el instante tK está en la posición (xk, yk, zk) y ve al emisor bajo la incidencia (θ (tkx0, y0, z0) , Δ (tk, x0, y0, z0) ) . Los ángulos θ (t, x0, y0, z0) y Δ (t, x0, y0, z0) evolucionan a lo largo del tiempo y dependen de la posición del emisor así como de la trayectoria del portador.
Los ángulos θ (t, x0, y0, z0) y Δ (t, x0, y0, z0) se indican con respecto a una red de N antenas que se puede fijar bajo el portador tal y como lo muestra la figura 2.
Actualmente existen varias técnicas que permiten determinar la posición (xm, ym, zm) de un emisor. Estas técnicas de localización difieren, en particular, por los parámetros que se estiman de forma instantánea al nivel de la red de los sensores. Estas se pueden clasificar de la siguiente manera:
Uso de la goniometría Estas técnicas se conocen y se utilizan en la técnica anterior. En la mayor parte de los casos, estas se basan en una goniometría 1 D en acimut. Los acimuts θkm = θ (tk, xm, ym, zm) asociados al m-ésimo emisor se miden para diferentes instantes tk. Utilizando la posición (xk, yk, zk) del portador en el instante correspondiente k, se estima una posición (xmk, ymk, zmk) del emisor m mediante una intersección con el suelo. La posición (xk, yk, zk) del portador la proporciona un GPS, su orientación se obtiene mediante una brújula en el caso de un portador terrestre y mediante una central de navegación en el caso de una aeronave. A partir de todas las posiciones (xmk, ymk, zmk) , el método lleva a cabo una extracción de datos que permite determinar las M posiciones dominantes (xm, ym, zm) de los emisores incidentes. La localización se obtiene por triangulación o por intersección con el suelo (goniometría 2D) . El inconveniente de las técnicas de triangulación es que estas requieren un desplazamiento importante. Por otra parte, las técnicas de goniometría deben utilizar una red de sensores no ambigua para proporcionar las incidencias. Esto tiene como inconveniente la necesidad de una tabla de calibración y de limitar el tamaño de la red de sensores y, en consecuencia, de proporcionar unas incidencias limitadas en precisión.
Uso de la diferencia de fase entre 2 sensores remotos La diferencia de fase Δ (tk, x0, y0, z0) entre sensores depende de la posición de los 2 sensores así como de la incidencia (θ (tkx0, y0, z0) , Δ (tk, x0, y0, z0) ) del emisor. Esta fase que depende del tiempo está directamente vinculada a la posición (x0, y0, z0) del emisor. Como consecuencia, al estudiar la función del tiempo Δφ (t, x0, y0, z0) se puede deducir de esta la posición (x0, y0, z0) del emisor. En esta familia de aplicación los 2 sensores son remotos para aumentar la precisión de la medición de la fase. Esto tiene como inconveniente que varía la diferencia de fase Δφ (t, x0, y0, z0) en función del tiempo en más de 2π y la técnica precisa entonces una etapa que permite desarrollar la fase en más de 2π. Por otra parte, en esta técnica la fase se mide realizando directamente una intercorrelación entre 2 sensores lo que no permite tratar el caso de emisores múltiples.
Uso de la medición de la frecuencia portadora del emisor
Estas técnicas aprovechan el hecho de que la frecuencia portadora estimada es la suma de la frecuencia portadora del emisor y del desfase doppler causado por la velocidad de desplazamiento del portador. El desfase doppler tiene la ventaja de depender de la posición (x0, y0, z0) del emisor y de serlo también en función del tiempo Δf (t, x0, y0, z0) . Como consecuencia al estudiar la función del tiempo Δf (t, x0, y0, z0) se puede deducir de esta la posición (x0, y0, z0) del emisor. Sin embargo, la medición de este desfase doppler presenta como inconveniente el hecho de necesitar unos emisores con unas formas de ondas particulares. Esta medición de frecuencia se puede hacer mediante técnicas cíclicas que suponen que la señal emitida es no circular.
Uso de los tiempos de propagación Estas técnicas aprovechan las diferencias de tiempo de propagación entre antenas (TDOA o Time difference of arrival) que están directamente vinculadas a las distancias respectivas del emisor en las diferentes antenas y, por lo tanto, a la posición (x0, y0, z0) del emisor. Al utilizar al menos tres antenas lo suficientemente espaciadas, se puede deducir la posición (x0, y0, z0) del emisor mediante localización hiperbólica. El inconveniente de estas técnicas es que estas no se pueden llevar a cabo en un contexto mono portador a causa de las considerables distancias requeridas entre antenas. Por otra parte, en estas técnicas la diferencia de tiempo se mide realizando directamente una intercorrelación entre 2 sensores, lo que no permite tratar el caso de emisores múltiples.
El documento “Localization of multiple sources with moving arrays” de Sheinvald describe dos estimadores que permiten encontrar las direcciones de llegada en una red móvil de sensores.
El procedimiento de acuerdo con la invención se basa, en particular, en un nuevo enfoque para la estimación directa de las posiciones (xm, ym, zm) de cada uno de los emisores a partir de un análisis paramétrico de la señal multicanal
en distintos instantes tk durante un intervalo Dt. El análisis paramétrico tiene, en particular, como función adicional separar los diferentes emisores en cada instante tk. A continuación se asocian los parámetros de un mismo emisor procedentes de los diferentes instantes tk para finalmente localizar cada uno de los emisores.
La invención se refiere a un procedimiento de localización de una o de varias fuentes, encontrándose dicha o dichas fuentes en movimiento con respecto a una red de sensores, comprendiendo el procedimiento una etapa de separación de las fuentes con el fin de identificar los vectores directores asociados a la respuesta de los sensores a una fuente de incidencia dada, siendo los ángulos de incidencia variables y dependiendo de la posición de la red de sensores y de dichas fuentes, que comprende las siguientes etapas:
• asociar los vectores directores a1m...aKm del m-ésimo emisor obtenidos respectivamente en los instantes t1...tK, durante un intervalo Dt con el fin de separar los diferentes emisores en cada instante tK;
• localizar la posición (xm, ym, zm) del m-ésimo emisor a partir de los vectores a1m...aKm asociados a un mismo emisor y procedentes de los diferentes instantes tK.
El procedimiento se caracteriza porque la etapa de localización comprende al menos las siguientes etapas:
maximizar un criterio de correlación vectorial normalizado Lk (x, y, z) en el espacio (x, y, z) de posición de un emisor con
El procedimiento de acuerdo con la invención presenta, en particular, las siguientes ventajas:
permite localizar, además de la posición en (x, y, z) de un emisor, su vector velocidad; se aplica cuando se está en presencia de uno o de varios emisores incidentes; su aplicación no precisa conocimientos particulares acerca de la señal emitida; permite usar una red de sensores ambigua, es decir varias incidencias están asociadas a la misma respuesta
de la red, que tiene la ventaja de ser grande y, por lo tanto, de ser más robusta frente a los fenómenos de acoplamiento entre antenas o, de manera más general, frente a los errores de modelización de la red de antenas;
se puede aplicar en redes calibradas en (θ, Δ) ;
se puede aplicar en redes de antenas con diversidad de amplitud como las antenas colocalizadas: red con 35 dipolos con el mismo centro de fase y que tienen orientaciones diferentes.
Se mostrarán mejor otras características y ventajas del objeto de la presente invención con la lectura de la siguiente descripción que se da a título ilustrativo y en modo alguno excluyente en relación con las figuras adjuntas, que representan:
la figura 1 el esquema de principio de la localización de un emisor de posición instalado en tierra por medio de 40 una aeronave;
la figura 2 la relación entre una red de antenas y la incidencia de un emisor; la figura 3 un esquema general que explica el funcionamiento del procedimiento... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de localización de una o de varias fuentes, encontrándose dicha o dichas fuentes en movimiento con respecto a una red de sensores, comprendiendo el procedimiento una etapa de separación de las fuentes con el fin de identificar los vectores directores asociados a la respuesta de los sensores en una fuente de incidencia dada,
siendo los ángulos de incidencia variables y dependientes de la posición de la red de sensores y de dichas fuentes, que comprende las siguientes etapas:
• asociar los vectores directores a1m...aKm obtenidos para el m-ésimo emisor y respectivamente para los instantes t1...tK, durante un intervalo Dt con el fin de separar los diferentes emisores en cada instante tK;
• localizar la posición (xm, ym, zm) del m-ésimo emisor a partir de los vectores a1m...aKm asociados a un mismo 10 emisor y procedentes de los diferentes instantes tK,
caracterizado dicho procedimiento porque la etapa de localización comprende al menos la siguiente etapa:
maximizar un criterio de correlación vectorial normalizado Lk (x, y, z) en el espacio (x, y, z) de posición de un emisor con
en las que wk es el vector ruido para todas las posiciones (x, y, z) de un emisor.
3. Procedimiento de acuerdo con la reivindicación 1 caracterizado porque comprende una etapa en la que se determina la matriz de covarianza R = E[wK wK H] del vector ruido y porque se maximiza el criterio
5. Procedimiento de acuerdo con una de las reivindicaciones 1 a 4 caracterizado porque comprende una etapa de comparación de los máximos con un valor umbral.
6. Procedimiento de acuerdo con una de las reivindicaciones 1 a 5 caracterizado porque el valor de K se fija 30 inicialmente en K0.
7. Procedimiento de acuerdo con una de las reivindicaciones 1 a 6 caracterizado porque los emisores que hay que localizar son móviles y porque el vector considerado está parametrizado por la posición del emisor a localizar y el vector velocidad.
Patentes similares o relacionadas:
SISTEMA DE MICRO CAMARAS CON SENSORES DE MOVIMIENTO PARA AYUDA A LA CONDUCCIÓN, del 21 de Enero de 2020, de PALAZZOLO, Umberto: 1. Sistema de micro cámaras con sensores de movimiento para ayuda a la conducción, caracterizado esencialmente, porque está formado por micro cámaras […]
Mejoras aportadas y relativas a los datos de rumbos de navegación y/o de velocidad de un buque, del 15 de Octubre de 2019, de BAE SYSTEMS PLC: Un método para determinar una velocidad de un buque, en donde el buque es una embarcación , ubicada en una zona litoral, que comprende las etapas de: detectar objetos […]
Dispositivo para un vehículo, del 11 de Septiembre de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para medir un posible espacio de estacionamiento (P) mediante un vehículo que pasa al espacio de estacionamiento (P), donde mediante un […]
Aparato de tratamiento de señales para generar un mapa de Alcance-Doppler, del 28 de Agosto de 2019, de AptCore Ltd: Aparato de tratamiento de señales para generar un mapa de alcance-Doppler , comprendiendo el aparato: una unidad de cálculo de transformada […]
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado, del 31 de Julio de 2019, de AUDI AG: Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por […]
SISTEMA DE CONDUCCIÓN ASISTIDA BASADO EN UNA RED DE COMUNICACIÓN DE ONDA MILIMÉTRICA Y DETECCIÓN DE OBJETOS POR TÉCNICAS RADAR, del 27 de Junio de 2019, de KITAZAWA MOLINA, Elvia Isabel: La presente invención describe un sistema de integración de componentes en vehículos y un método de operación de los mismos que posibilita al conductor […]
MÉTODO DE DETECCIÓN Y GESTIÓN DE FATIGA MENTAL DURANTE LA CONDUCCIÓN BASADO EN ANALISIS DE MIRADA Y DETECCION DE OBJETOS, del 27 de Junio de 2019, de PARDO GUZMAN, Dino Alejandro: Un método y detección y gestión de fatiga mental para aumentar la seguridad y confort de los conductores de tracto camiones, basado en análisis […]
Sistema satelital autónomo de evitación de desechos orbitales, del 15 de Mayo de 2019, de Briskman, Robert: Un sistema satelital que puede evitar de forma autónoma una colisión con desechos orbitales , que incluye un satélite , […]